





MyActuator RMD-X4-36 34N·m Penggerak Planetari Motor Tanpa Berus DC dengan Pengekod Berkembar, EtherCAT & CAN Bus, Nisbah Gear 36:1
MyActuator RMD-X4-36 34N·m Penggerak Planetari Motor Tanpa Berus DC dengan Pengekod Berkembar, EtherCAT & CAN Bus, Nisbah Gear 36:1
MyActuator
Tidak dapat memuatkan ketersediaan pengambilan
Overview
MyActuator RMD-X4-36 Planetary Actuator DC Brushless Motor adalah penggerak sendi berprestasi tinggi yang direka untuk sistem robotik dan automasi yang memerlukan kawalan gerakan yang tepat, output tork yang tinggi, dan integrasi yang padat. Dengan tork puncak 34N·m, nisbah gear 36:1, dan struktur galas roller silang, ia memberikan kemampuan anti-bengkok yang cemerlang dan ketahanan. Dilengkapi dengan protokol komunikasi berganda EtherCAT + CAN dan respons ultra-pantas 250μs, penggerak ini adalah ideal untuk robot humanoid, lengan robot, platform mudah alih, dan aplikasi robotik canggih yang lain. Reka bentuk pengodok berganda (input ABS 17-bit / output 18-bit) memastikan ketepatan penentuan kedudukan yang ultra-tinggi, sementara saiz padat (55mm × 61mm, 0.36kg) membolehkan integrasi yang ringan dan efisien.
Ciri Utama
-
Pengodak Dwi Ketepatan Tinggi: 17-bit (input) + 18-bit (output) untuk ketepatan 0.01°.
-
Protokol EtherCAT + CAN Bus: Komunikasi fleksibel dengan respons ultra-pantas 250μs.
-
Galas Roller Silang: Prestasi anti-bengkok yang unggul dan jangka hayat yang panjang.
-
Densiti Kuasa Tinggi: Diameter kompak 55mm, panjang 61mm, dan berat hanya 0.36kg.
-
Tork Puncak 34N·m dan Tork Dinilai 11.5N·m memastikan output gerakan yang stabil dan berkuasa.
-
Kecekapan Tinggi: Kuasa dinilai 100W dengan teknologi FOC (Pengawalan Berorientasikan Medan) yang lancar.
-
Aplikasi Pelbagai: Direka untuk robot humanoid, exoskeleton, pengendali, dan sistem automasi.
Spesifikasi
| Parameter | Nilai |
|---|---|
| Model | RMD-X4-P36-36-C |
| Voltan Masukan | 24V |
| Perbandingan Gear | 36:1 |
| Kelajuan Tanpa Beban | 111 RPM |
| Arus Tanpa Beban | 0.9 A |
| Kelajuan Dinilai | 83 RPM |
| Tork Dinilai | 11.5 N·m |
| Kuasa Keluaran Dinilai | 100 W |
| Tork Puncak | 34 N·m |
| Arus Fasa Puncak | 21.5 A (rms) |
| Pasangan Pole | 13 |
| Jenis Pengodak | Pengodak Dwi ABS 17-bit (Input) / 18-bit (Output) |
| Protokol Komunikasi | EtherCAT / CAN Bus |
| Saiz | Ø55mm × 61mm |
| Berat | 0.36 kg |
Isi Pakej
-
1 × Motor Aktuator Planetari RMD-X4-36
-
1 × Bekalan Kuasa + Kabel Komunikasi CAN Bus
-
1 × Rintangan Terminal 120Ω
-
2 × Kabel Komunikasi EtherCAT
-
1 × Modul Komunikasi CAN Bus (penyesuai USB-CAN)
Aplikasi
-
Robot humanoid dan bionik
-
Robot lengan kolaboratif
-
Exoskeleton dan robot pemulihan
-
Robot perkhidmatan dan platform mudah alih
-
Sistem automasi ketepatan yang memerlukan aktuator kompak dan tork tinggi
Butiran

Penggerak planetari dengan 34N.m tork puncak, nisbah gear 36:1, 0.36kg berat, Ø55mm×61mm saiz. Ciri-ciri komunikasi EtherCAT/CANBUS, pengodok ganda, MCU berkelajuan tinggi, cip CAN, dan galas roller bersilang.

Motor RMD-X4-P36-36: 24V, 10.5N.m tork, 83RPM, pengodok ganda, EtherCAT+CAN BUS, nisbah gear 36, 0.36kg, pengodok ABS-17BIT/18BIT, dimensi terperinci disertakan.

Motor X4-36, 100W, 12N.m, pengodok ganda, input 17BIT, output 18BIT, 63rpm, nisbah gear 1:36, antara muka CAN bus, penunjuk LED.

Motor MYACTUATOR X4-36, 100W, 12N.m, pengodok ganda, 83rpm, nisbah 1:36. Termasuk bekalan kuasa, kabel CAN BUS, resistor 120Ω, kabel EtherCAT, dan modul CAN BUS dengan penyesuai USB-CAN percuma.
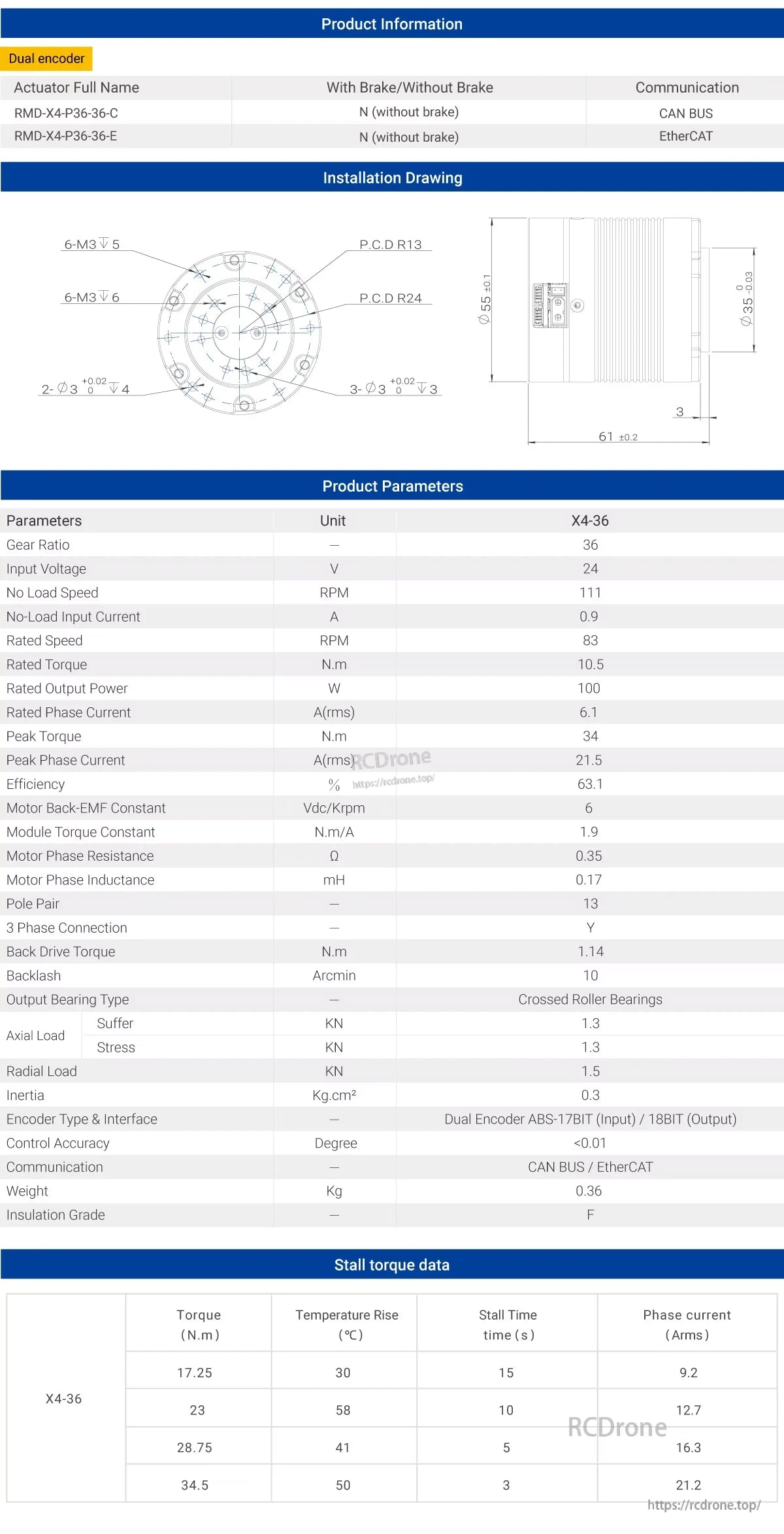
Motor RMD-X4-P36-36 mempunyai pengodok ganda, nisbah gear 36, input 24V, output 100W, CAN BUS/EtherCAT. Tork yang dinilai: 10.5 N.m, kelajuan: 83 RPM, berat: 0.36 kg. Data tork terhenti termasuk tork, kenaikan suhu, masa, dan nilai arus fasa.

Butiran antara muka termasuk port kuasa, CAN, dan EtherCAT. Pembungkusan mengandungi motor, kabel, resistor, dan modul komunikasi. Dimensi: 100x100x70mm. Termasuk penyesuai USB-CAN.
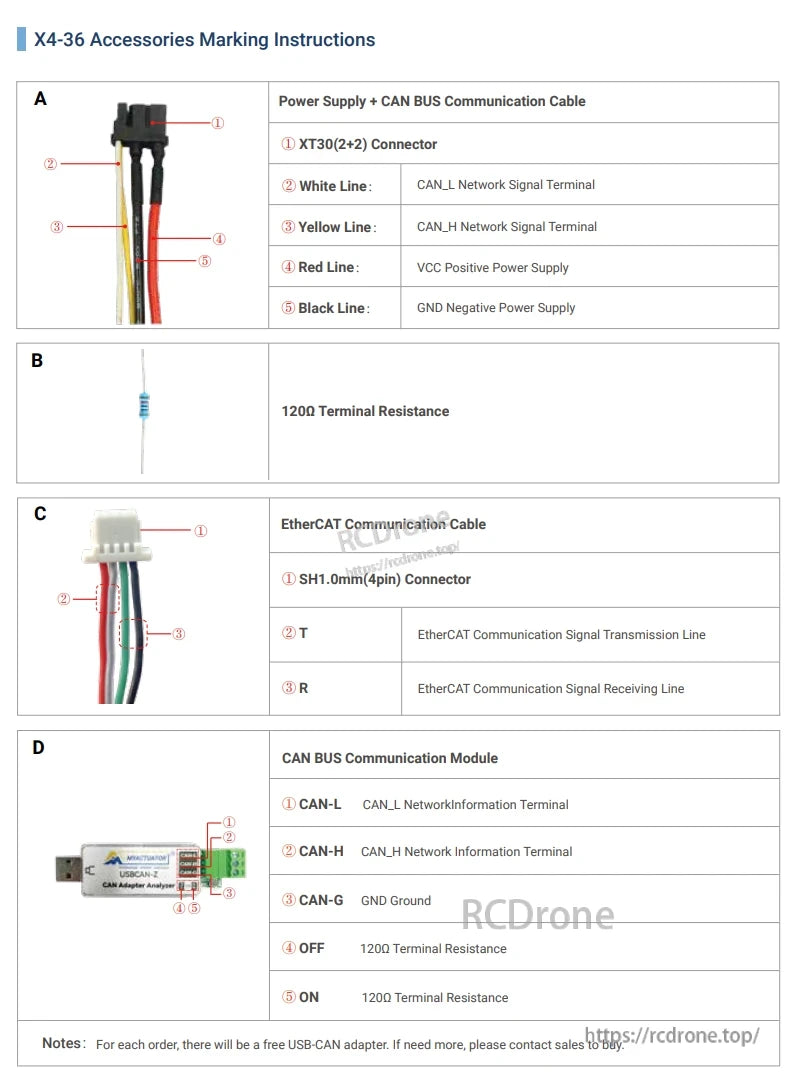
Aksesori X4-36 termasuk bekalan kuasa, kabel CAN BUS, kabel EtherCAT, rintangan 120Ω, dan modul CAN. Butiran merangkumi penyambung, warna wayar, garis isyarat, dan tetapan terminal untuk sambungan komunikasi dan kuasa. Penyesuai USB-CAN disertakan dengan setiap pesanan.
Related Collections





