





MyActuator RMD-X6-60 Penggerak Servo Dwi Pengekod 320W 20N·m 60N·m Puncak 48V EtherCAT CAN BUS Motor Sendi Robotik Ketepatan Tinggi
MyActuator RMD-X6-60 Penggerak Servo Dwi Pengekod 320W 20N·m 60N·m Puncak 48V EtherCAT CAN BUS Motor Sendi Robotik Ketepatan Tinggi
MyActuator
Tidak dapat memuatkan ketersediaan pengambilan
Overview
Aktuator servo pintar MyActuator RMD-X6-60 adalah unit pemacu terintegrasi yang padat dan berprestasi tinggi yang direka untuk aplikasi robotik, automasi, dan kawalan gerakan tepat. Dilengkapi dengan antaramuka komunikasi EtherCAT dan CAN BUS serta sistem pengodak dwi, aktuator ini menawarkan ketumpatan tork yang tinggi, kawalan yang tepat, dan pengurusan gerakan pelbagai mod. Ia adalah ideal untuk sendi robot, lengan robot, robot mudah alih, dan sistem automasi industri yang memerlukan ketepatan dan kebolehpercayaan yang tinggi.
Parameter Utama:
-
Kuasa Dinilai: 320W
-
Tork Dinilai: 20N·m
-
Tork Puncak: 60N·m
-
Kelajuan Dinilai: 153RPM
-
Nisbah Gear: 19.612:1
-
Ketepatan Pengodak Dwi: 17bit Input / 17bit Output
-
Protokol Komunikasi: CAN BUS, EtherCAT
-
Voltan Input: 48V
Ciri Utama
-
Reka Bentuk Pengodak Dwi
Pengodak input dan output 17-bit yang terintegrasi memberikan maklum balas yang tepat untuk kawalan gerakan yang tepat dan pemantauan status. -
Sokongan Pelbagai Protokol
Antara muka EtherCAT dan CAN BUS terbina dalam memastikan keserasian yang luas dengan pelbagai platform kawalan robotik dan automasi. -
Densiti Kuasa Tinggi dan Tork
Berupaya memberikan kuasa berterusan 320W dan tork puncak 60N·m, memenuhi keperluan aplikasi dinamik dan beban berat. -
Mod Kawalan Hibrid
Menyokong kawalan hibrid kedudukan, kelajuan, dan tork, membolehkan sistem gerakan pelbagai paksi dan terkoordinasi yang canggih. -
Maklum Balas Ketepatan Tinggi dan Respons Pantas
MCU berkelajuan tinggi dan pemproses CAN yang terintegrasi memberikan respons pada tahap milisaat untuk kawalan yang tepat. -
Reka Bentuk Kompak dan Ringan
Dimensi 120mm × 120mm × 80mm dan berat 0.82kg menjadikannya ideal untuk aplikasi robotik ringan di mana ruang dan berat adalah kritikal.
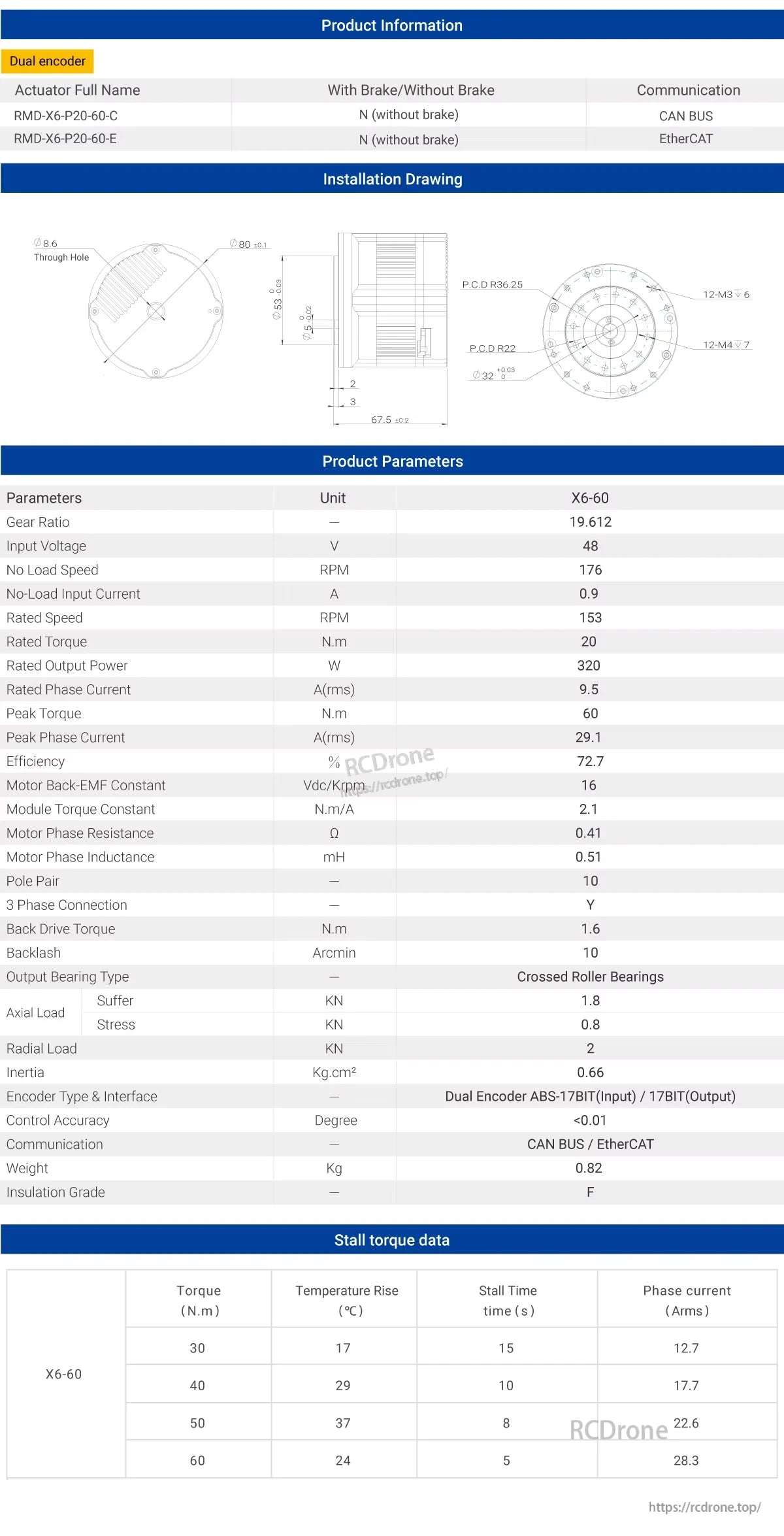
Spesifikasi Teknikal
| Parameter | Nilai |
|---|---|
| Model | RMD-X6-P20-60-C |
| Voltan Masukan | 48V |
| Kuasa Dinilai | 320W |
| Tork Dinilai | 20N·m |
| Tork Puncak | 60N·m |
| Kelajuan Dinilai | 153RPM |
| Kelajuan Tanpa Beban | 176RPM |
| Arus Dinilai | 9.5A (RMS) |
| Arus Tanpa Beban | 0.9A |
| Arus Puncak | 29.1A (RMS) |
| Nisbah Gear | 19.612:1 |
| Pasangan Tiang | 10 |
| Resolusi Pengodok | Input: 17bit / Output: 17bit |
| Berat | 0.82kg |
Deskripsi Antara Muka
Port Kuasa dan Komunikasi
| Port | Deskripsi |
|---|---|
| EtherCAT_OUT | Port output EtherCAT |
| EtherCAT_IN | Port input EtherCAT |
| CAN_L | Terminal isyarat CAN Rendah |
| CAN_H | Terminal isyarat CAN Tinggi |
| GND | Bekalan kuasa negatif |
| VCC | Bekalan kuasa positif |
Terminal Isyarat
R+/R-: Data maklum balas dari modul ke stesen induk
-
T+/T-: Isyarat arahan kawalan dari stesen induk ke modul
Dimensi dan Struktur
-
Diameter: 120mm
-
Ketinggian: 80mm
-
Lubang Pemasangan: P.C.D R26.25 dan R22 dengan 12 × lubang berulir M4
-
Poros Keluaran: Antara muka flang standard untuk sambungan fleksibel dengan komponen luaran
Maklumat Pembungkusan
| Item yang Disertakan | Kuantiti |
|---|---|
| Bekalan Kuasa + Kabel Komunikasi CAN BUS | 2 pcs |
| Kabel Komunikasi EtherCAT | 2 pcs |
| Rintangan Terminal 120Ω | 1 pc |
| Modul Komunikasi CAN BUS (Penyesuai USB-CAN) | 1 pc |
Dimensi Pembungkusan:
-
Panjang × Lebar × Tinggi: 120mm × 120mm × 80mm
Aksesori dan Sambungan
Bekalan Kuasa + Kabel CAN BUS
-
Penghubung: XT30 (2+2)
-
Garisan Putih: isyarat CAN_L
-
Garisan Kuning: isyarat CAN_H
-
Garisan Merah: bekalan kuasa positif VCC
-
Garisan Hitam: bekalan kuasa negatif GND
Kabel Komunikasi EtherCAT
-
Penghubung: SH1.0mm (4-pin)
-
T line: Pemindahan isyarat komunikasi EtherCAT
-
R line: Penerimaan isyarat komunikasi EtherCAT
Modul CAN BUS
-
Terminal: CAN_L, CAN_H, CAN_G, dan penamat boleh ditukar 120Ω (ON/OFF)
-
Penyesuai USB-CAN disediakan secara percuma dengan setiap pesanan
Aplikasi
-
Sendi Robot Kolaboratif
-
Robot Perkhidmatan dan Humanoid
-
Sistem Pemanduan atau Pengendalian Robot Mudah Alih
-
Robot Perindustrian
-
Sistem Kawalan Gerakan Berketepatan Tinggi
Platform Penyelidikan dan Pendidikan
Ringkasan
Aktuator MyActuator RMD-X6-60 mengintegrasikan pengodak dwi ketepatan tinggi, protokol komunikasi EtherCAT dan CAN BUS, ketumpatan tork tinggi, dan faktor bentuk yang padat, menjadikannya penyelesaian yang serba boleh dan boleh dipercayai untuk robotik dan automasi industri. Dengan kuasa 320W, tork puncak 60N·m, dan maklum balas resolusi tinggi 17-bit, penggerak servo ini memberikan prestasi dan ketepatan kawalan yang luar biasa untuk projek robotik yang maju.
Butiran
Penggerak servo RMD-X6-60 mempunyai pengodok dwi, nisbah gear 19.612, input 48V, kuasa 320W, komunikasi CAN BUS/EtherCAT, 20 N.m tork yang dinilai, 60 N.m tork puncak, dan berat 0.82 kg.
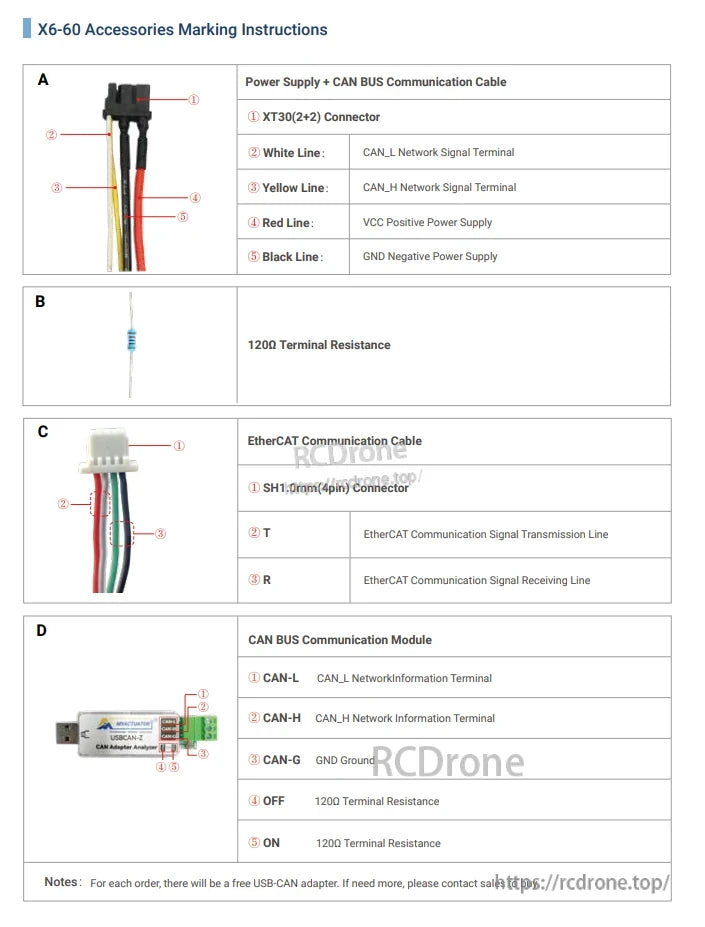
Aksesori X6-60 termasuk kabel kuasa dan CAN BUS dengan wayar berwarna, rintangan terminal 120Ω, kabel EtherCAT dengan garis T/R, dan modul CAN BUS dengan terminal untuk CAN-L, CAN-H, GND, dan tetapan rintangan terminal. Adapter USB-CAN percuma disertakan untuk setiap pesanan.

Penggerak servo RMD-X6-P20-60-C dengan EtherCAT+CAN BUS, 19.612 nisbah, input 48V, kelajuan penarafan 153RPM, tork 20Nm, output 320W, pengodok dwi, MCU berkelajuan tinggi dan cip CAN, galas roller bersilang.
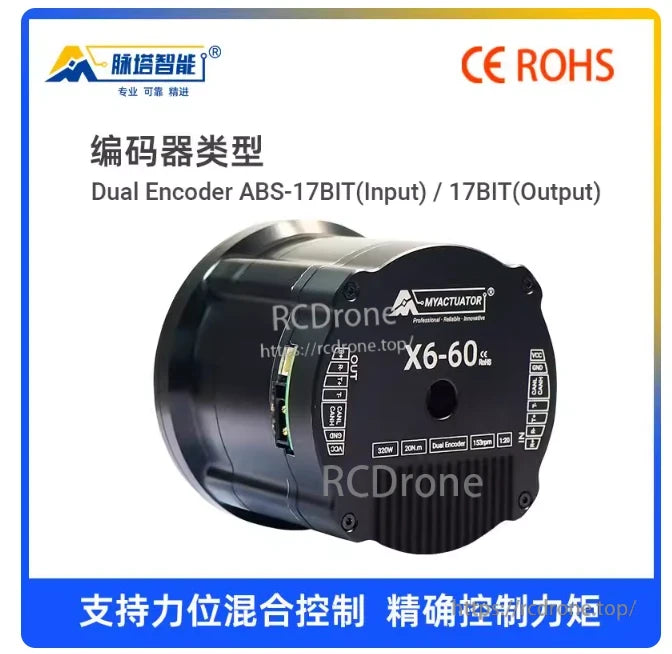
Pengodok Dwi ABS-17BIT Input/Output, Penggerak Servo X6-60, 300W, 20N.m, 128rpm, menyokong kawalan hibrid daya-posisi, kawalan tork yang tepat.
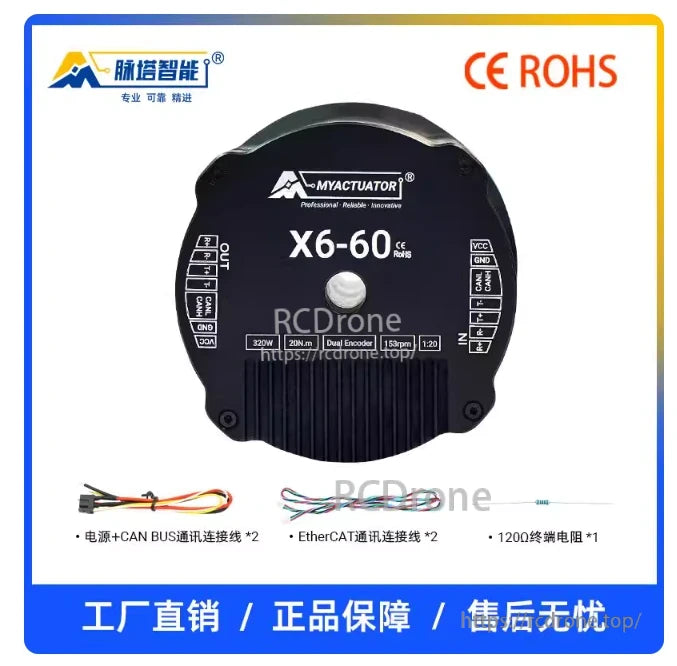
Penggerak servo X6-60, 320W, 20N.m, pengodok dwi, 158rpm, nisbah 1:20, dengan kabel CAN BUS dan EtherCAT, penamat 120Ω, disahkan CE ROHS.

Pembungkusan Penggerak Servo RMD-X6-60 dengan pendawaian CAN BUS, kabel kuasa, dan rintangan penamat 1200.
Related Collections





