





OYMotion ROH-AP001 Tangan Robotik Cekap, 6 DOF, 11 sendi, sensor daya, UART/RS485/CAN, kawalan PID, 0.7 s
OYMotion ROH-AP001 Tangan Robotik Cekap, 6 DOF, 11 sendi, sensor daya, UART/RS485/CAN, kawalan PID, 0.7 s
OYMotion
Tidak dapat memuatkan ketersediaan pengambilan
Gambaran Umum
OYMotion ROH-AP001 Tangan Dexterous adalah Tangan Robot dengan 11 sendi bergerak dan 6 pemacu motor terbina dalam yang menyediakan 6 darjah kebebasan aktif. Algoritma kawalan motor PID terbina dalam membolehkan penggenggaman dan manipulasi objek yang tepat dan boleh diulang. Setiap jari mengintegrasikan sensor daya untuk pemantauan masa nyata dan kawalan gelung tertutup bagi daya penggenggaman. Antara muka fizikal termasuk UART, RS485 atau CAN FD, dengan sokongan untuk protokol siri SerialCtrl, ModBus-RTU, dan protokol CAN. Platform ROS/ROS2 disokong untuk pembangunan sekunder melalui SDK (perjanjian lesen diperlukan).
Ciri Utama
- 6 DOF aktif dan 11 artikulasi; jari yang dimotorisasi secara bebas untuk genggaman yang semula jadi.
- Pemacu motor terbina dalam dan kawalan PID; semua penggerakan diintegrasikan dalam tangan.
- Sensor daya pada setiap jari dengan maklum balas sentuhan dan kawalan daya masa nyata.
- Putaran ibu jari yang dikuasakan ditambah dengan reka bentuk jari yang boleh dilipat.
- Operasi skrin sentuh disokong di hujung jari.
- Gerakan pantas: 0.7 s lenturan/penjajaran penuh dan 0.7 s putaran penuh ibu jari.
- Kapasiti beban: sehingga 30 Kg beban pasif untuk empat jari (bengkok), 10 Kg setiap jari (bengkok), 8 Kg setiap jari (diluruskan).
- Saiz dan proporsi seperti manusia; pad jari lembut dan sarung tangan silikon; reka bentuk pergelangan tangan yang disesuaikan; penggera mesej.
- Antara muka dan protokol: UART/RS485/CAN dengan SerialCtrl dan ModBus-RTU; CAN pada 1M baud.
- Bahan yang dibuktikan: aloi aluminium, aloi zink, keluli tahan karat, silikon, plastik.
Spesifikasi
| DOF Aktif | 6 |
| Sendi bergerak (artikulasi) | 11 |
| Jarak menegak dari hujung jari tengah ke pergelangan tangan | 183 mm |
| Jarak menegak dari hujung ibu jari ke pergelangan tangan | 95 mm |
| Panjang ibu jari | 111 mm |
| Lebar tapak tangan maksimum | 82 mm |
| Diameter pergelangan tangan | 49 mm |
| Sudut pembukaan dan penutupan maksimum di sisi ibu jari | 0~31 ° |
| Sudut pembukaan dan penutupan maksimum ibu jari ke tapak tangan | 0~50 ° |
| Sudut putaran lateral ibu jari | 0~90 ° |
| Masa membengkok/menegangkan untuk julat penuh pada kelajuan maksimum | 0.7 saat |
| Masa putaran ibu jari untuk julat penuh pada kelajuan maksimum | 0.7 saat |
| Kuasa aktif setiap hujung jari dalam keadaan diregang | ≥0.5 Kgf |
| Kuasa aktif setiap hujung jari dalam keadaan membengkok | ≥1.0 Kgf |
| Kuasa aktif maksimum hujung ibu jari | ≥1.0 Kgf |
| Muatan pasif maksimum untuk empat jari dalam keadaan bengkok | 30 Kg |
| Muatan pasif maksimum untuk setiap jari dalam keadaan bengkok | 10 Kg |
| Muatan pasif maksimum untuk setiap jari dalam keadaan diregang | 8 Kg |
| Fungsi sentuhan jari pada skrin | Disokong |
| Maklum balas daya jari | Disokong |
| Suasana suhu kerja | -10 °C ~ +40 °C |
| Kelembapan persekitaran kerja | Kelembapan relatif maksimum 85% |
| Jangka hayat reka bentuk | 3 tahun |
| Berat (termasuk pergelangan tangan) | 640 g ± 5 g |
| Antara Muka Komunikasi | UART/RS485/CAN |
| Kadar Baud | UART: 9600/19200/38400/57600/115200/230400/460800/921600; RS485: 9600/19200/38400/57600/115200/230400/460800; CAN: 1M |
| Protokol Disokong | UART: SerialCtrl, ModBus-RTU; RS485: SerialCtrl, ModBus-RTU; CAN: SerialCtrl |
| Bahan | Aloi aluminium; aloi zink; keluli tahan karat; silikon; plastik |
Aplikasi
- Penghujung robotik dan robot humanoid.
- Peralatan pendidikan dan penyelidikan.
- Prostetik bionik.
- Automasi industri dan sistem AGV.
Untuk bantuan pesanan, panduan integrasi, atau sokongan teknikal, sila hubungi [email protected] or lawati https://rcdrone.top/.
Manual
Butiran

ROHand memberikan ketepatan penempatan ±1mm melalui kawalan motor PID terbina dalam dan menawarkan enam darjah kebebasan aktif untuk mensimulasikan gerakan tangan manusia seperti mencubit dan menggenggam. Sesuai untuk robot humanoid, pemangkas robotik, sistem pemeriksaan, prostetik bionik pintar, dan aplikasi pendidikan atau penyelidikan, reka bentuknya menyokong manipulasi yang pelbagai dan tepat dalam tugas yang kompleks.
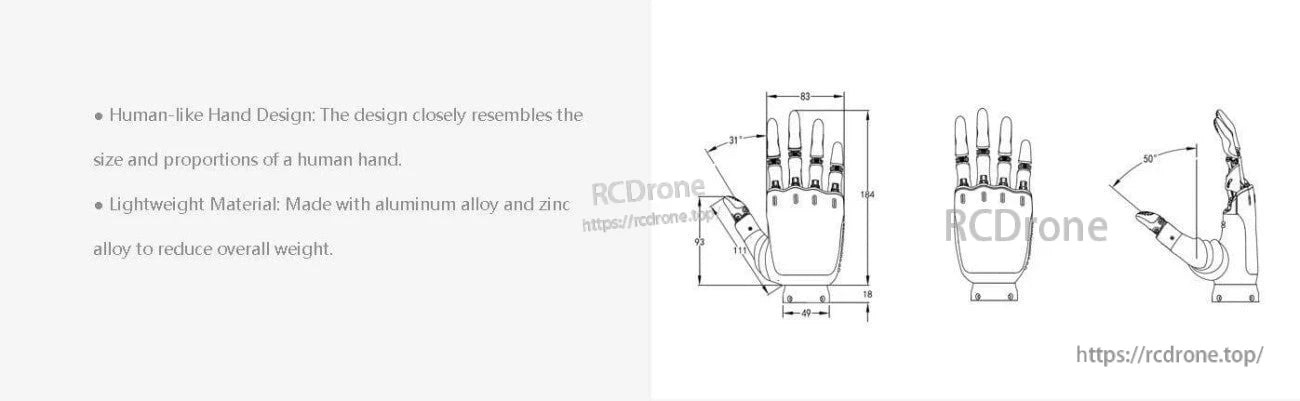
Tangan robot yang cekap seperti manusia dengan pembinaan aloi zink aluminium ringan dan dimensi yang tepat.

Tangan robot OYMotion ROH-AP001 yang cekap meniru proporsi manusia, dilengkapi dengan jari yang boleh digerakkan dan sensor untuk manipulasi robotik yang tepat dan bersaiz sebenar.
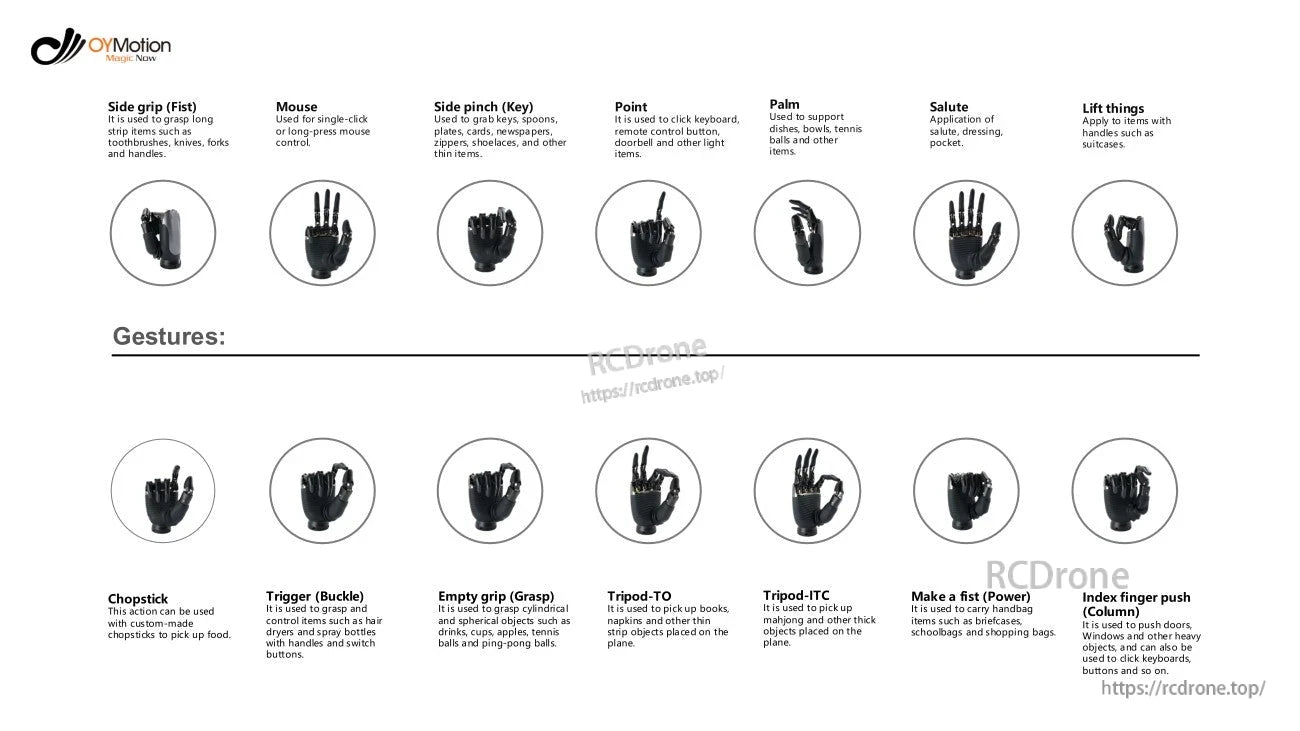
Tangan robot OYMotion melakukan 14 gerakan tepat—seperti menggenggam, menunjuk, dan mengangkat—untuk menangani tugas harian seperti menggunakan sumpit, membawa beg, atau mengklik papan kekunci, menunjukkan ketangkasan yang maju dan utiliti praktikal.

Tangan robot OYMotion menawarkan jari bermotor, reka bentuk boleh lipat, pad lembut, ibu jari berkuasa, sarung silikon, penggerak terbina dalam, penggera, pergelangan tangan khusus, dan penyambung RS485 untuk genggaman semula jadi yang cekap.
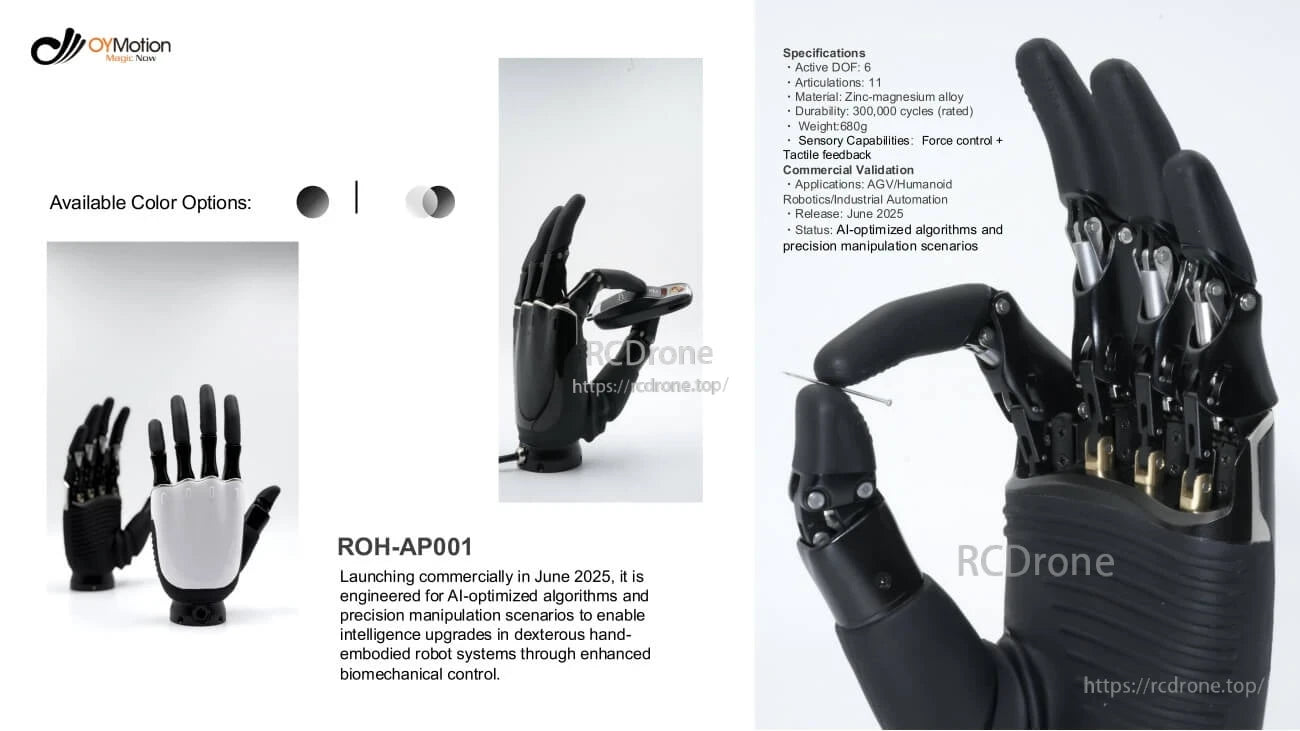
Tangan robot OYMotion ROH-AP001 yang cekap mempunyai 6 DOF aktif, 11 sendi, binaan aloi zink-magnesium, ketahanan 300k-siklus, berat 680g, dan menawarkan maklum balas daya/taktile untuk AI dan tugas ketepatan—dilancarkan pada Jun 2025.

Tangan robot OYMotion ROH-AP001 mempunyai jari yang dimotor, ibu jari yang berkuasa, sarung tangan silikon, dan penggerak terbina dalam. Dibina daripada aluminium, zink, keluli, silikon, dan plastik, ia termasuk penggera, pergelangan tangan khusus, protokol RS485, reka bentuk boleh lipat, dan spring tekanan.
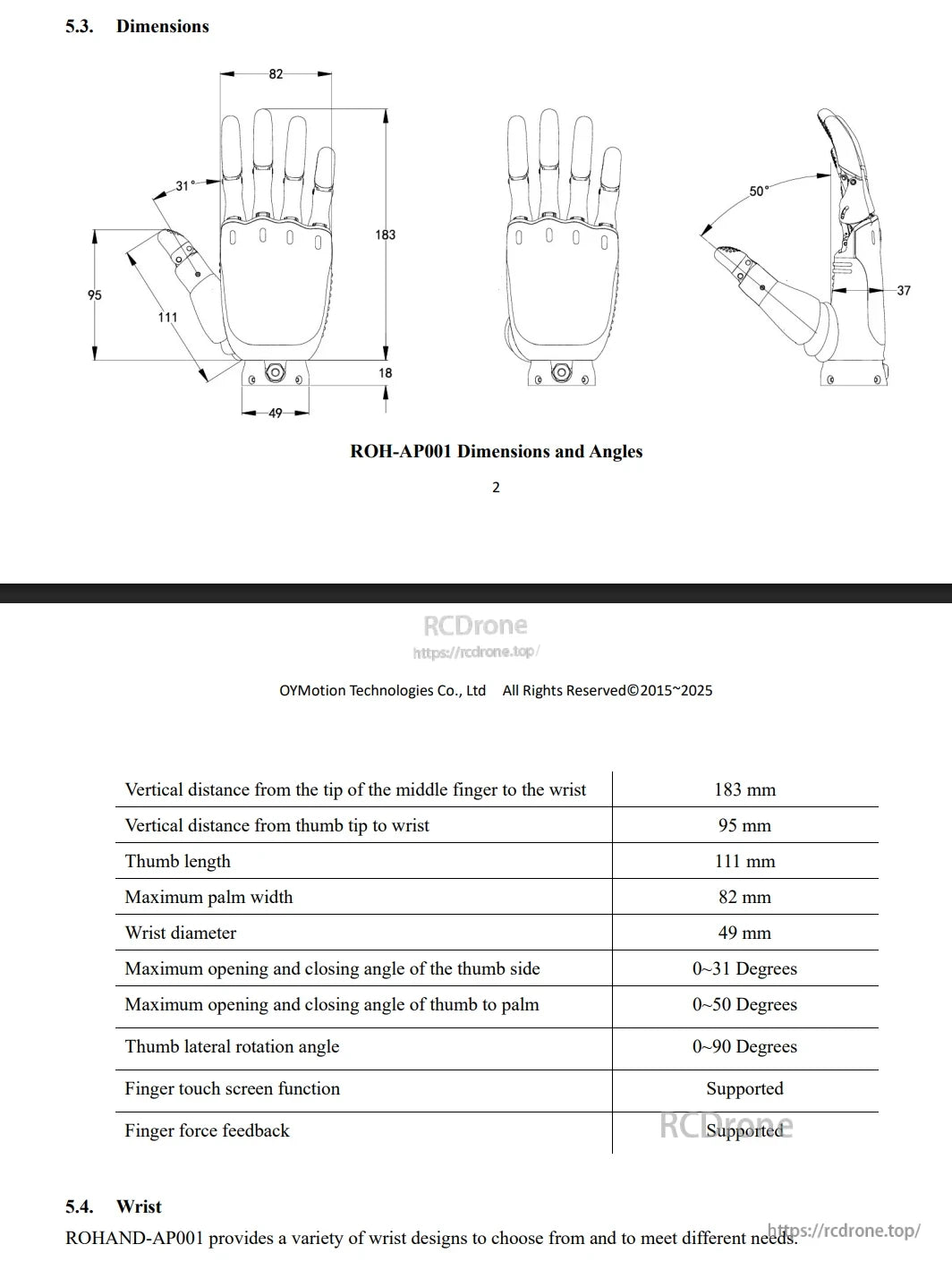
Dimensi tangan robot ROH-AP001 termasuk ketinggian jari ke pergelangan 183mm, ibu jari ke pergelangan 95mm, panjang ibu jari 111mm, lebar tapak tangan 82mm, diameter pergelangan 49mm. Sudut ibu jari: 0-31° sisi, 0-50° ke tapak tangan, 0-90° putaran. Menyokong skrin sentuh dan maklum balas daya.
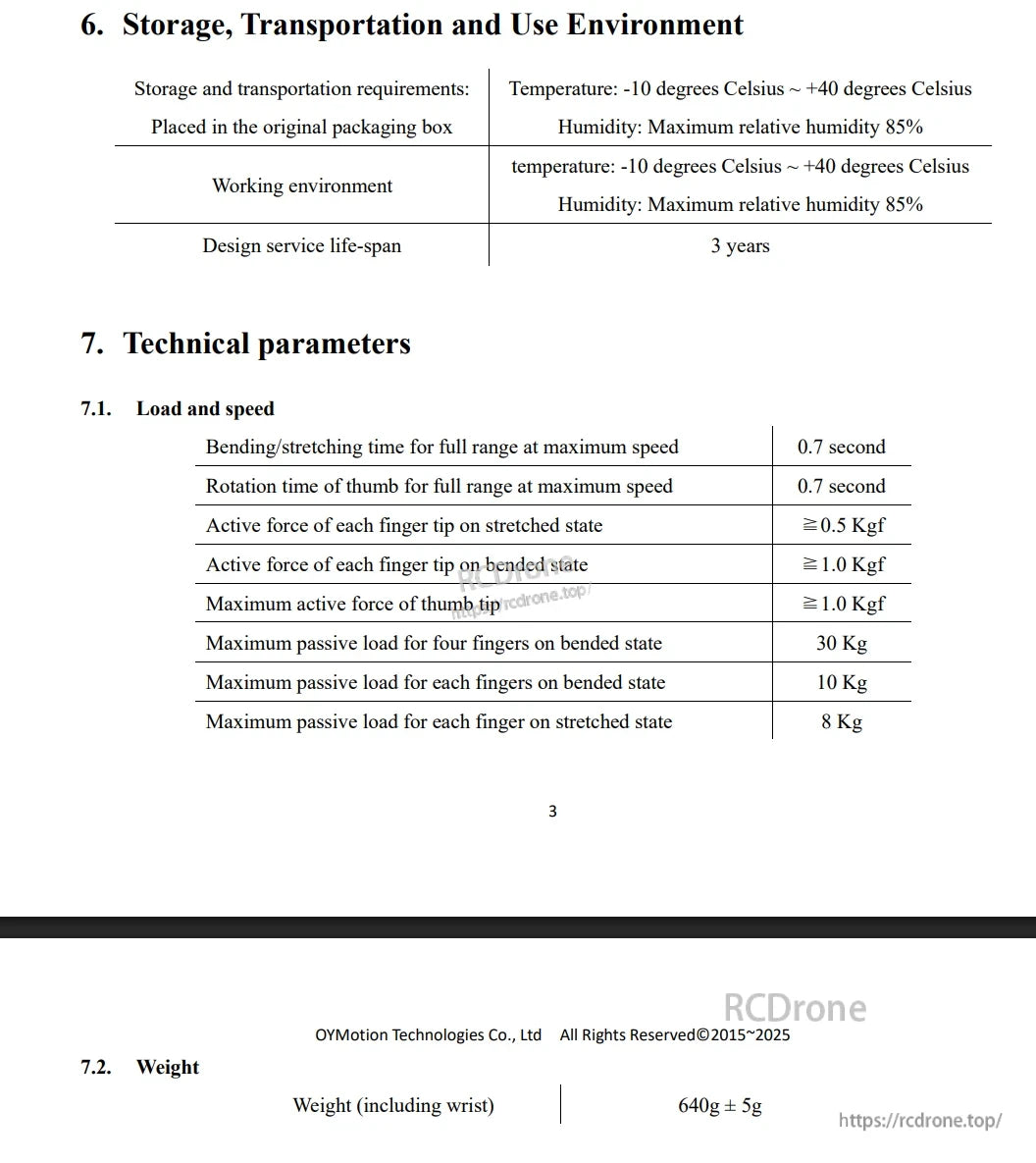
Tangan robot OYMotion ROH-AP001 beroperasi antara -10°C hingga +40°C, kelembapan maksimum 85%. Jangka hayat reka bentuk: 3 tahun. Berat: 640g ±5g. Daya aktif jari ≥0.5–1.0 Kgf; beban pasif sehingga 30kg untuk empat jari.
Related Collections





