





OYMotion ROH-LiteS001 Tangan Robot – Tangan Cekap Saiz Sebenar, Ibu Jari Berkuasa, UART/RS485/CAN, DC 12-24V, 457g
OYMotion ROH-LiteS001 Tangan Robot – Tangan Cekap Saiz Sebenar, Ibu Jari Berkuasa, UART/RS485/CAN, DC 12-24V, 457g
OYMotion
Tidak dapat memuatkan ketersediaan pengambilan
Overview
OYMotion ROH-LiteS001 Tangan Robot adalah tangan bersaiz sebenar yang cekap dengan proporsi yang menyerupai manusia. Ia mengintegrasikan semua penggerak dalam tangan, mempunyai jari yang digerakkan secara bebas untuk genggaman yang semula jadi, dan putaran ibu jari yang dikuasakan dengan pelbagai sudut pembukaan. Reka bentuknya termasuk pad jari lembut dan sarung tangan silikon untuk sentuhan yang stabil, ditambah dengan penunjuk LED dan penggera mesej untuk maklum balas status. Antara muka komunikasi industri standard (UART/RS485/CAN) dan protokol membolehkan integrasi yang mudah.
Ciri Utama
- Jari yang digerakkan secara bebas untuk genggaman yang semula jadi
- Putaran ibu jari yang dikuasakan; reka bentuk jari boleh dilipat
- Pad jari lembut dan sarung tangan silikon
- Semua penggerak dibina ke dalam tangan
- Penunjuk LED dan penggera mesej
- Reka bentuk pergelangan tangan yang disesuaikan dan penyambung pengikat
- Gerakan pantas: 0.7 saat lenturan/penjajaran penuh; 0.7 saat putaran ibu jari
- Fungsi skrin sentuh disokong
- Penilaian beban pasif yang kukuh bagi setiap jari
- Antara muka: UART/RS485/CAN dengan sokongan SerialCtrl dan ModBus-RTU
- Persekitaran kerja: -10 darjah Celsius hingga +40 darjah Celsius; kelembapan relatif maksimum 85%
Untuk pertanyaan produk atau sokongan, hubungi https://rcdrone.top/ atau emel [email protected].
Spesifikasi
| Jarak menegak dari hujung jari tengah ke pergelangan tangan | 169 mm |
| Jarak menegak dari hujung ibu jari ke pergelangan tangan | 97 mm |
| Panjang ibu jari | 110 mm |
| Lebar tapak tangan maksimum | 75 mm |
| Diameter pergelangan tangan | 49 mm |
| Sudut pembukaan dan penutupan maksimum di sisi ibu jari | 0~31 Darjah |
| Sudut pembukaan dan penutupan maksimum ibu jari ke tapak tangan | 0~50 Darjah |
| Sudut putaran sisi ibu jari | 0~90 Darjah |
| Fungsi sentuhan skrin jari | Disokong |
| Persekitaran kerja | Suasana: -10 darjah Celsius ~ +40 darjah Celsius; Kelembapan: Kelembapan relatif maksimum 85% |
| Masa membengkok/merenggang untuk julat penuh pada kelajuan maksimum | 0.7 saat |
| Masa putaran ibu jari untuk julat penuh pada kelajuan maksimum | 0.7 saat |
| Kuasa aktif setiap hujung jari dalam keadaan diregang | ≥0.45 Kgf |
| Kuasa aktif setiap hujung jari dalam keadaan membengkok | ≥1.0 Kgf |
| Kuasa aktif maksimum hujung ibu jari | ≥1.0 Kgf |
| Muatan pasif maksimum untuk empat jari dalam keadaan bengkok | 25 Kg |
| Muatan pasif maksimum untuk setiap jari dalam keadaan bengkok | 8 Kg |
| Muatan pasif maksimum untuk setiap jari dalam keadaan diregang | 5 Kg |
| Berat (termasuk pergelangan tangan) | 457g +/-5g |
| Sumber kuasa | DC 12-24V; kuasa yang dinilai 48W |
| Antara Muka Komunikasi | UART/RS485/CAN |
| Kadar Baud | UART: 9600/19200/38400/57600/115200/230400/460800/921600; RS485: 9600/19200/38400/57600/115200/230400/460800; CAN: 1M |
| Protokol yang Disokong | UART: SerialCtrl, ModBus-RTU; RS485: SerialCtrl, ModBus-RTU; CAN: SerialCtrl |
| Jangka hayat reka bentuk | 3 tahun |
Apa yang Termasuk
- Tangan mahir ROHAND (model ROH-LiteS001): 1 keping
- Manual pengguna: 1 salinan
- Sijil: 1 keping
- Kad jaminan: 1 keping
Aplikasi
- Mouse: kawalan klik tunggal atau tekan lama
- Jepit sisi (Kunci): mengambil kunci, sudu, pinggan, kad, surat khabar, zip, tali kasut dan barang-barang tipis lain
- Titik: mengklik papan kekunci, butang kawalan jauh, loceng pintu dan barang-barang ringan lain
- Telapak: menyokong pinggan, mangkuk, bola dan barang-barang serupa
- Isyarat memberi hormat dan berpakaian
- Angkat barang dengan pemegang seperti beg pakaian
- Sudip: gunakan dengan sudip yang dibuat khas untuk mengambil makanan
- Picu (Cangkuk): menggenggam dan mengawal barang dengan pemegang dan butang suis
- Pegangan kosong (Genggam): memegang objek silinder dan sfera seperti minuman, cawan, epal, bola tenis dan bola ping-pong
- Tripod-TO: mengambil buku, tisu dan objek jalur nipis yang diletakkan di atas permukaan
- Tripod-ITC: mengambil mahjong dan objek tebal lain yang diletakkan di atas permukaan
- Buat penumbuk (Kuasa): membawa barang-barang beg tangan seperti beg bimbit, beg sekolah dan beg beli-belah
- Tekan jari telunjuk (Kolum): menolak pintu, tingkap dan objek berat; klik papan kekunci dan butang
Manual
ROH-LiteS001-Dexterous_Hand.pdf
Butiran



OYMotion ROH-LiteS001 tangan robotik meniru proporsi manusia, dilengkapi dengan jari yang cekap dengan sensor.Direka untuk interaksi yang realistik dan tugas ketepatan dalam aplikasi robotik yang maju.
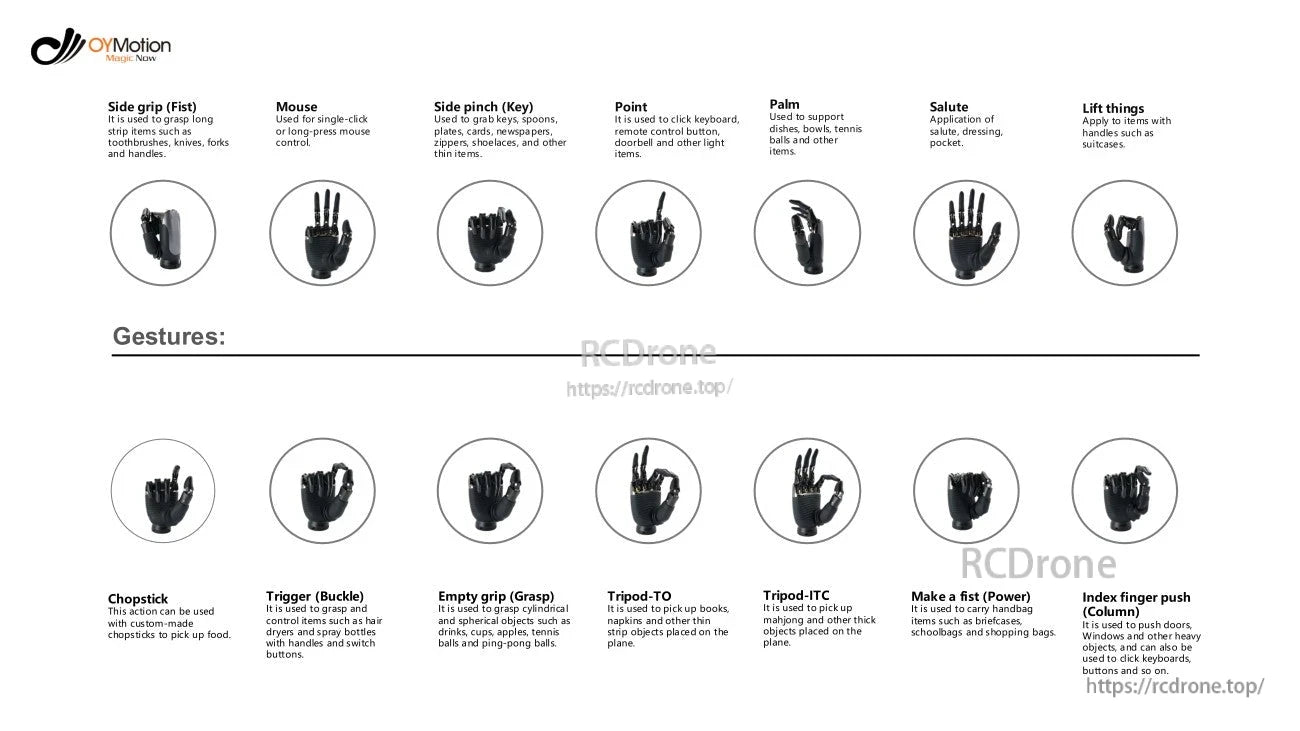
Tangan Robot OYMotion ROH-LiteS001 menunjukkan pelbagai genggaman dan isyarat untuk tugas harian seperti menggenggam, menunjuk, mengangkat, dan berinteraksi dengan objek seperti kunci, alat, dan elektronik melalui pergerakan tangan yang tepat.
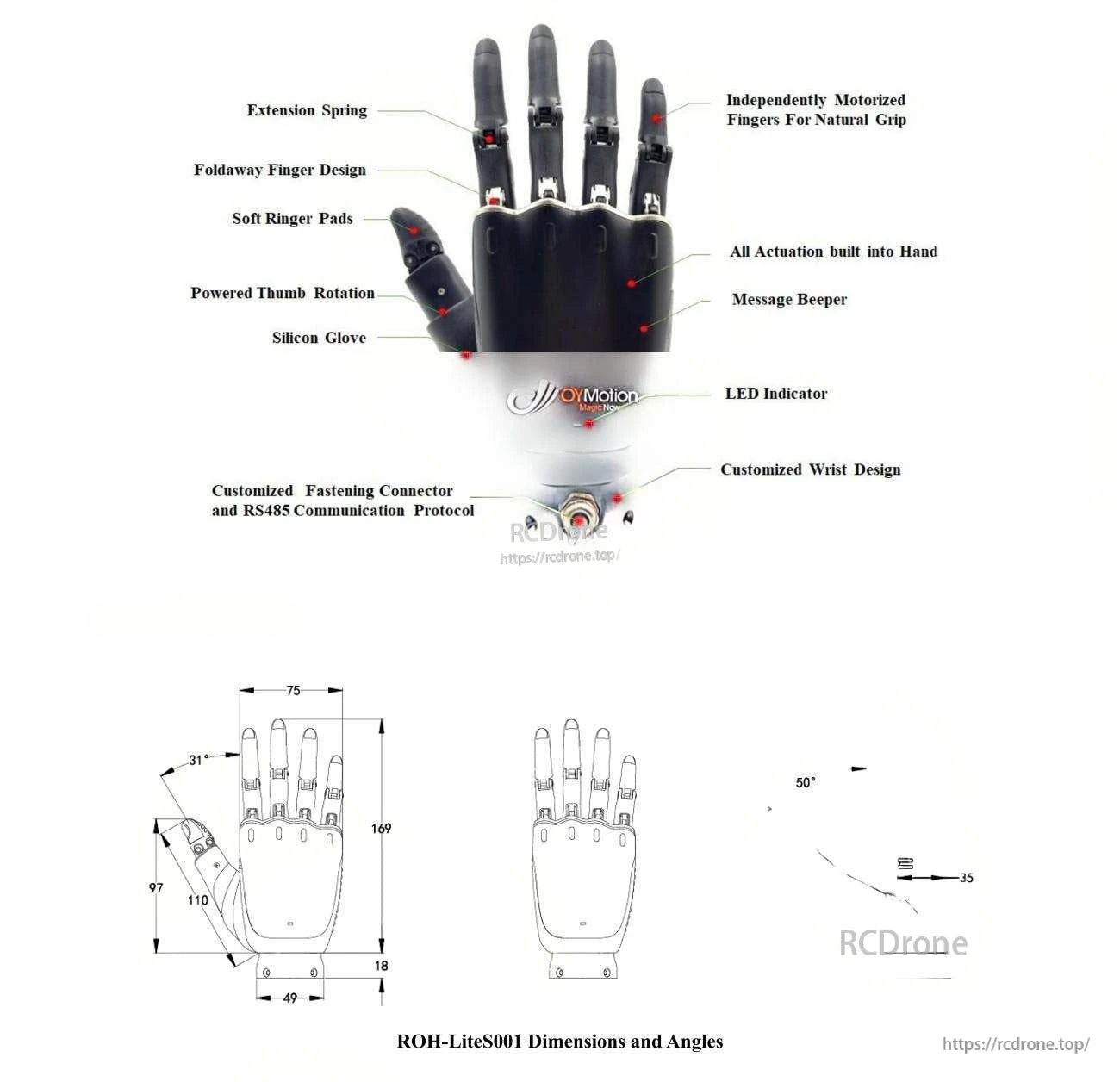
Tangan robot OYMotion ROH-LiteS001 termasuk jari yang bermotor, reka bentuk boleh lipat, pad lembut, ibu jari yang berkuasa, sarung tangan silikon, penggerak terbina dalam, penggera, LED, pergelangan tangan khusus, dan penyambung RS485. Dimensi dan sudut ditentukan di bawah.

Tangan robot ROH-LiteS001 termasuk jari yang bermotor, ibu jari yang berkuasa, sarung tangan silikon, penunjuk LED, penggera, reka bentuk boleh lipat, spring pemanjangan, dan komunikasi RS485 dengan pergelangan tangan khusus dan penyambung pengikat.
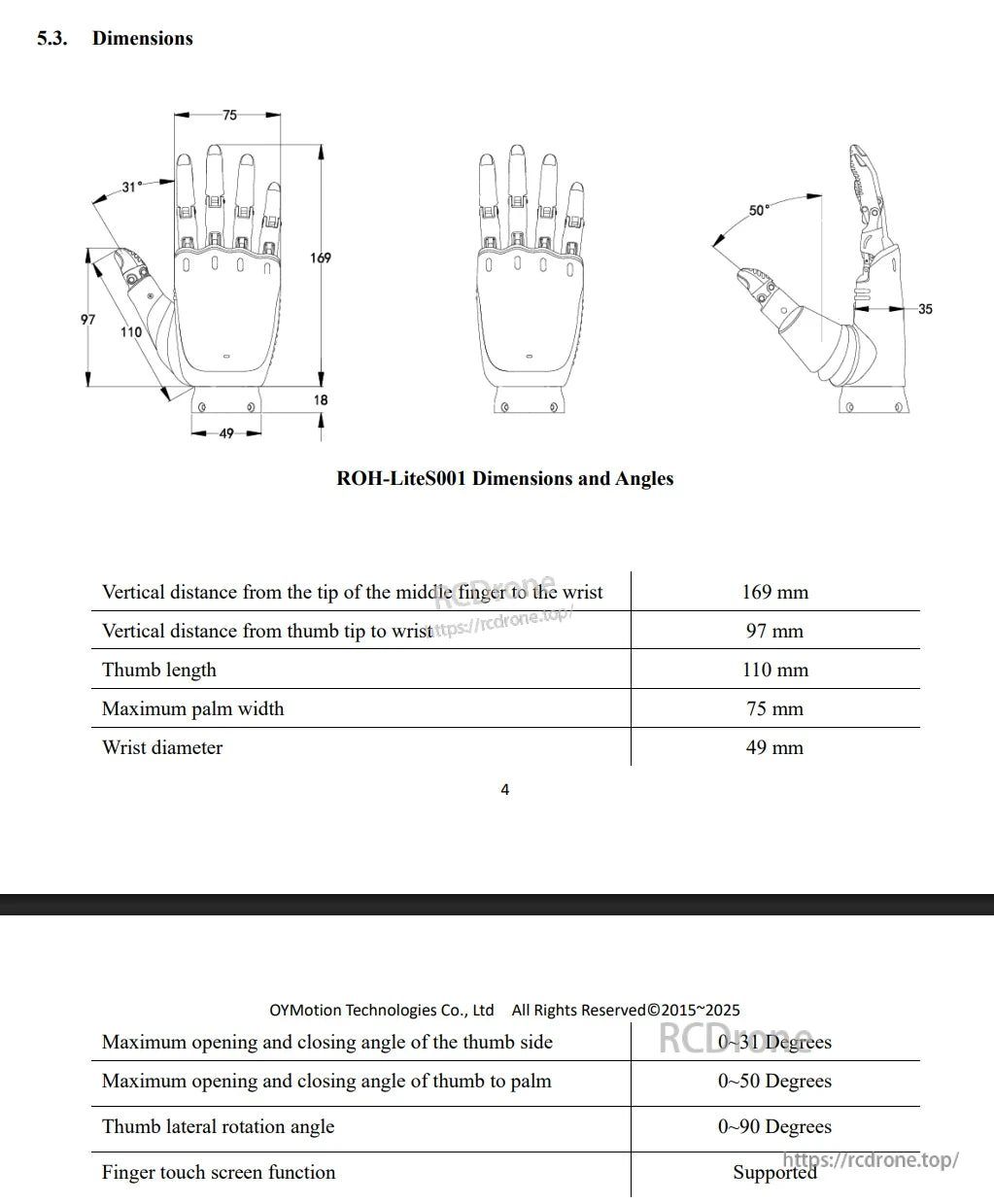
Dimensi tangan robot ROH-LiteS001 termasuk 169mm dari jari tengah ke pergelangan, 97mm dari hujung ibu jari ke pergelangan, 110mm panjang ibu jari, 75mm lebar tapak tangan, 49mm diameter pergelangan. Sudut ibu jari: 0-31° sisi, 0-50° ke tapak tangan, 0-90° putaran. Fungsi skrin sentuh disokong.
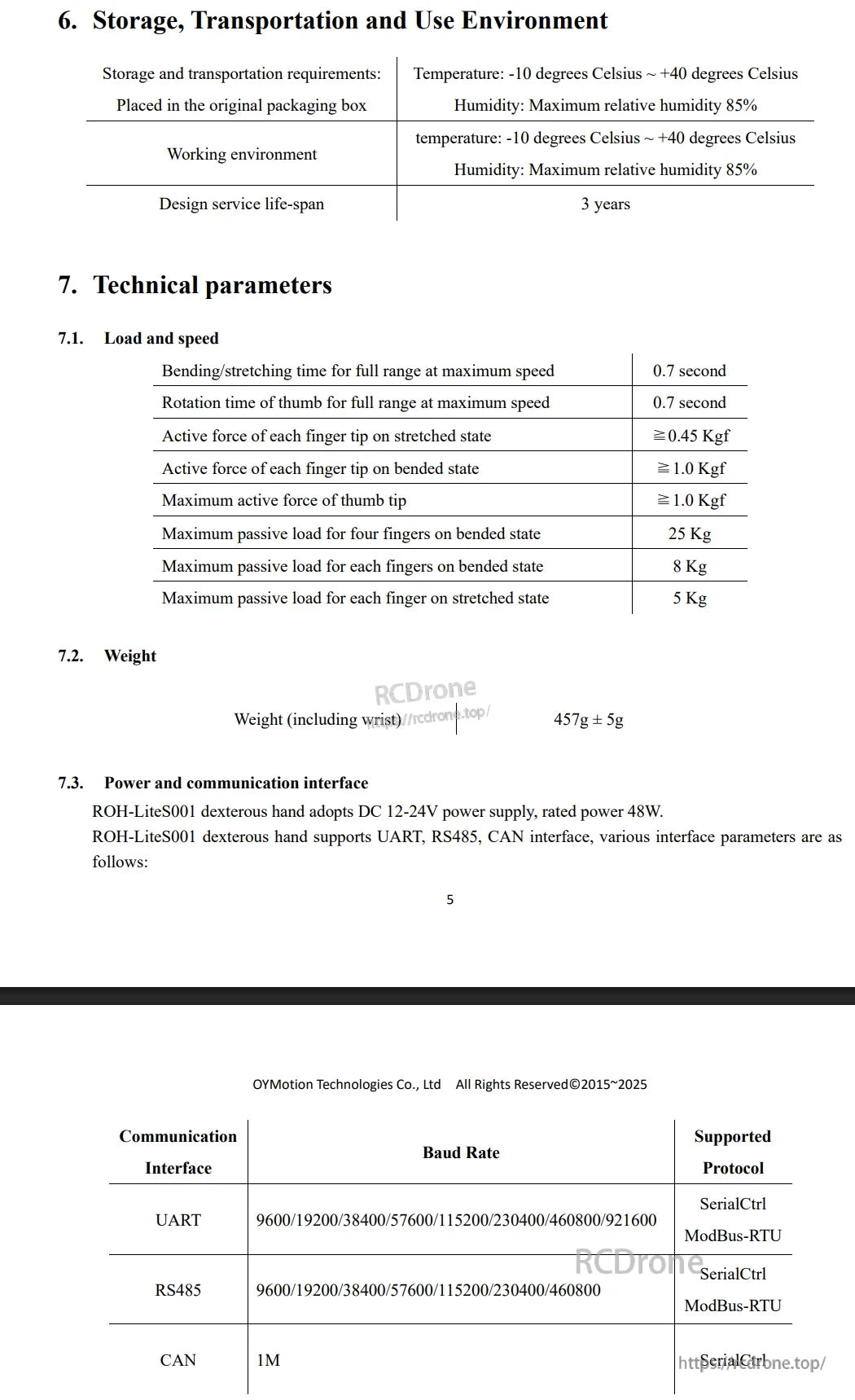
Tangan cekap ROH-LiteS001 beroperasi dalam suhu -10°C hingga +40°C, kelembapan maksimum 85%. Berat: 457g ±5g. Menyokong antara muka UART, RS485, CAN. Hayat reka bentuk: 3 tahun. Dikuasakan oleh DC 12-24V, 48W yang dinilai.
Model tangan cekap ROHAND ROH-LiteS001, manual, sijil, kad jaminan termasuk dalam senarai pembungkusan.
Related Collections





