Pixhawk PX4 Autopilot PIX 2.4.8 32Bit Flight Control - dengan PX4FMU PX4IO Safety Switch Buzzer 4G SD untuk DIY RC Drone Multirotor
Pixhawk PX4 Autopilot PIX 2.4.8 32Bit Flight Control - dengan PX4FMU PX4IO Safety Switch Buzzer 4G SD untuk DIY RC Drone Multirotor
RCDrone
Tidak dapat memuatkan ketersediaan pengambilan
Pixhawk PX4 Autopilot PIX 2.4.8 32Bit Kawalan Penerbangan SPESIFIKASI
Komunikasi Wayarles: Kawalan Wayar
Gunakan: Universal
Asal: Tanah Besar China

- Papan disepadukan dengan PX4FMU+PX4IO
- Pixhawk menggunakan teknologi cip dan sensor 32 bit baharu
Ciri-ciri:
- Pemproses berprestasi tinggi ARM 32 bit CortexM4 termaju, boleh menjalankan RTOS NuttX sistem pengendalian masa nyata;
- 14* PWM/ output penggerak;
- Antara muka bas (UART, I2C, SPI, CAN);
- Bekalan kuasa sandaran bersepadu dan pengawal sandaran kegagalan, pengawal utama boleh selamat beralih kepada kawalan sandaran;
- Menyediakan mod automatik dan manual;
- Menyediakan input kuasa berlebihan dan fungsi pemindahan kerosakan;
- Lampu LED berwarna;
- Antara muka buzzer berbilang nada;
- Micro SD untuk merekod data penerbangan;
Pemproses:
- 32 bit 2M flash memory STM32F427 Cortex M4, dengan perkakasan unit pemprosesan titik terapung
- Frekuensi utama: 256K, 168MHZ RAM
- 32 pemproses bersama sandaran bit STM32F103
Penderia:
- L3GD20 3 paksi digital 16 bit giroskop
- LSM303D 3 paksi 14 bit pecutan /magnetometer
Antaramuka:
- 5* UART, 1*voltan tinggi yang serasi, 2*kawalan aliran perkakasan
- 2* CAN
- Satelit DSM/DSM2/DSM-X input serasi penerima
- Input dan output serasi Futaba SBUS
- Input isyarat PPM
- input RSSI (PWM atau voltan)
- I2C
- SPI
- Input 3.3 dan 6.6VADC
- Antara muka MICRO USB luaran
Paket disertakan:
1 x 2.4.8 Kawalan utama Pixhawk
1 x Cangkang kawalan penerbangan
1 x Suis keselamatan
1 x Buzzer
1 x 6pin kepada 6pin talian
1 x 4Pin kepada 4Pin talian
1 x 3pin DuPont line
1 x 4G SD Card


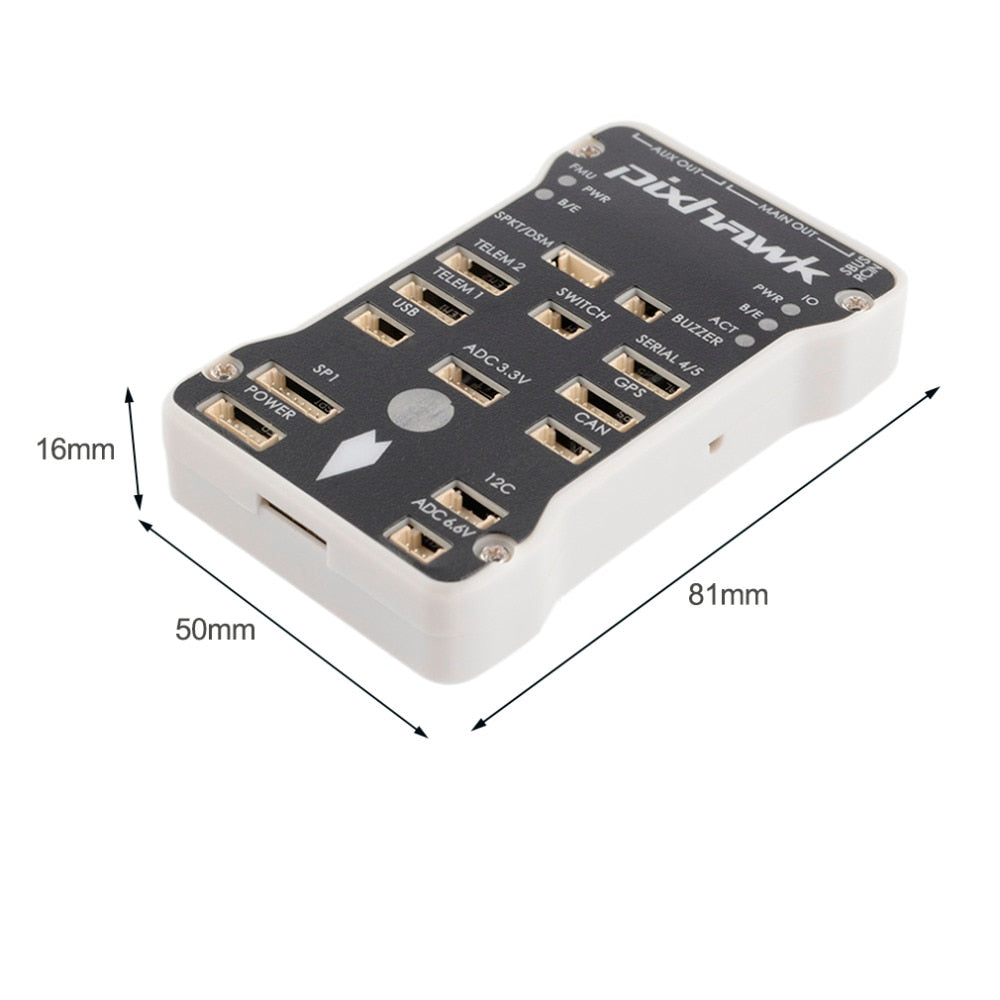
Gps CwN Mou AAut pidunwk a J SKd Jeltm > tukar telu HTELLM Uso AdcJ Jv Tower migce Adgody Adapter .


Autoxpilot PX4>Sistem Multirotor Drone RC DIY dengan Kawalan Penerbangan 2.4GHz, termasuk Buzzer Suis Keselamatan PX4FMU dan PX4IO, serasi dengan Kad SD 4G.

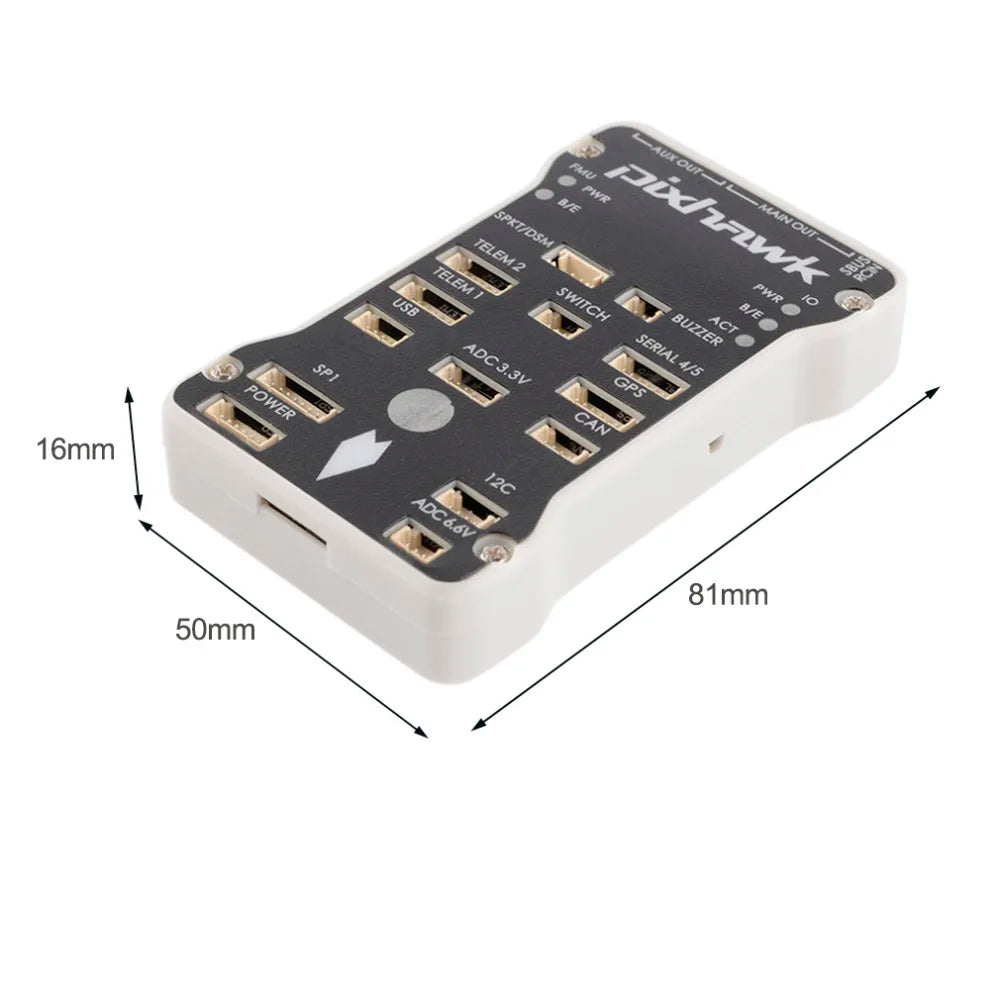

Auxout MANOUT pixdnewk FMU PWR Pwr B/E Bie SPKT/DSM BUZZER TELEM 2 Suis SIRI 4/5TELEM 1 GPS USB ADC3.Jv BOLEH 'Sw SPI 12C POWER ADC 66v KG UNIT TARE ONIOFF CAPACiTTsooOGXI G Idepv 4oo
Related Collections