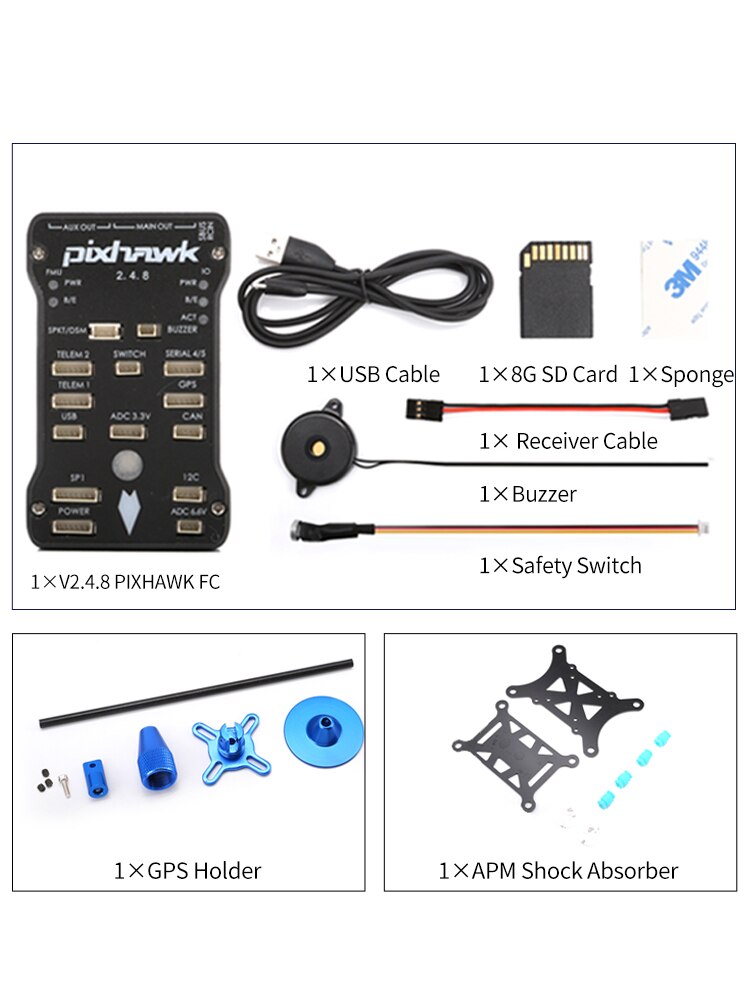
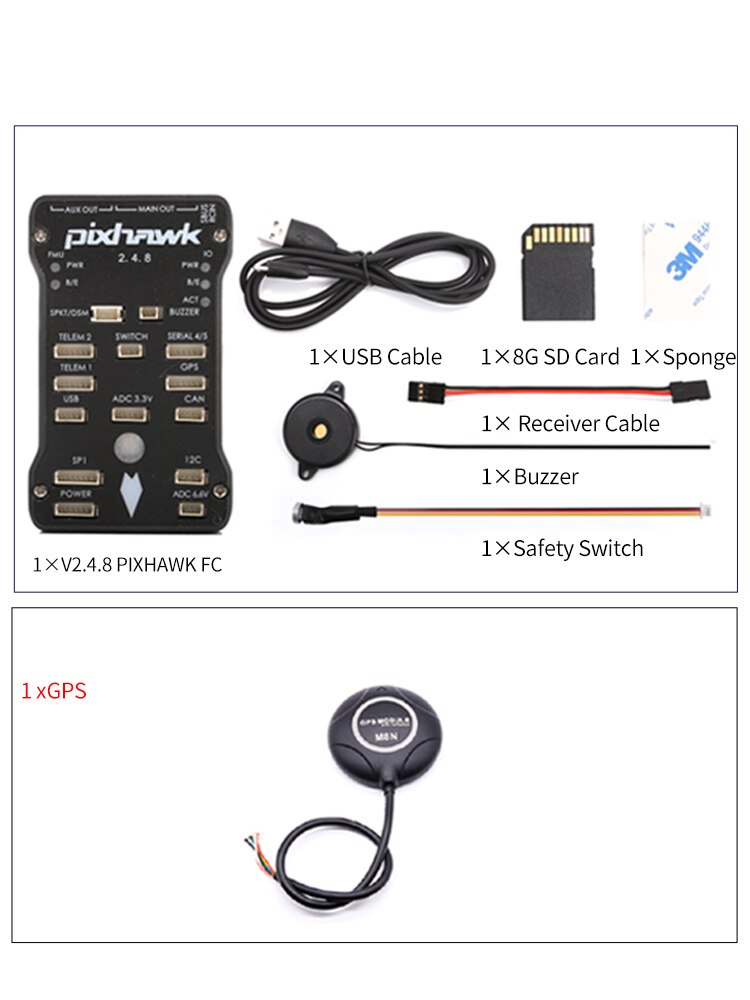
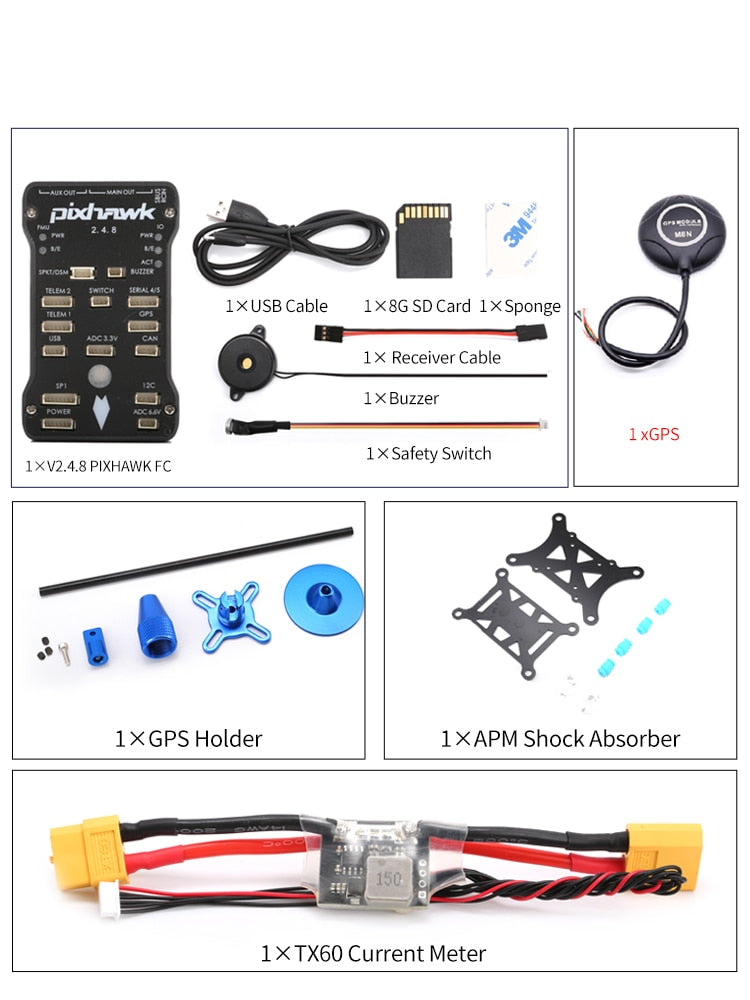
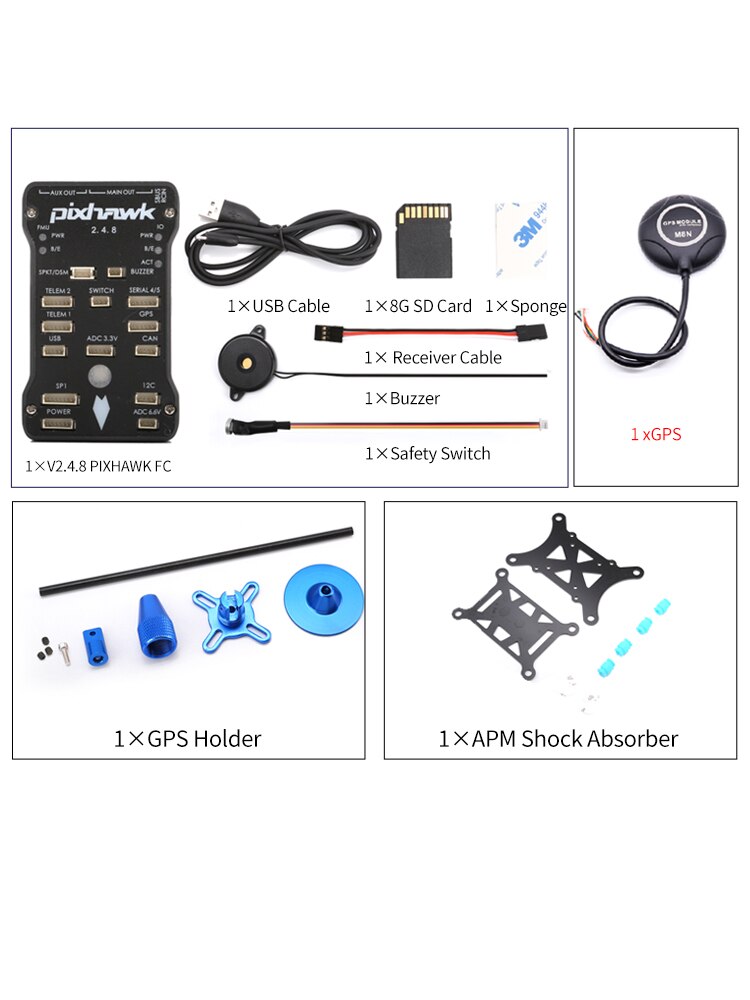
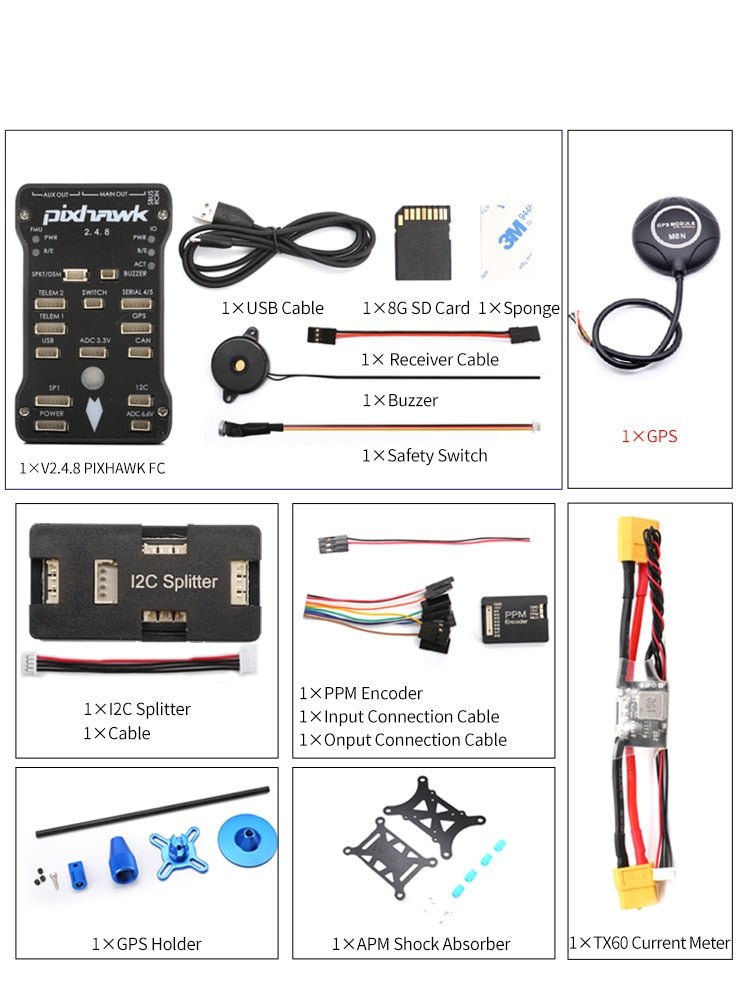
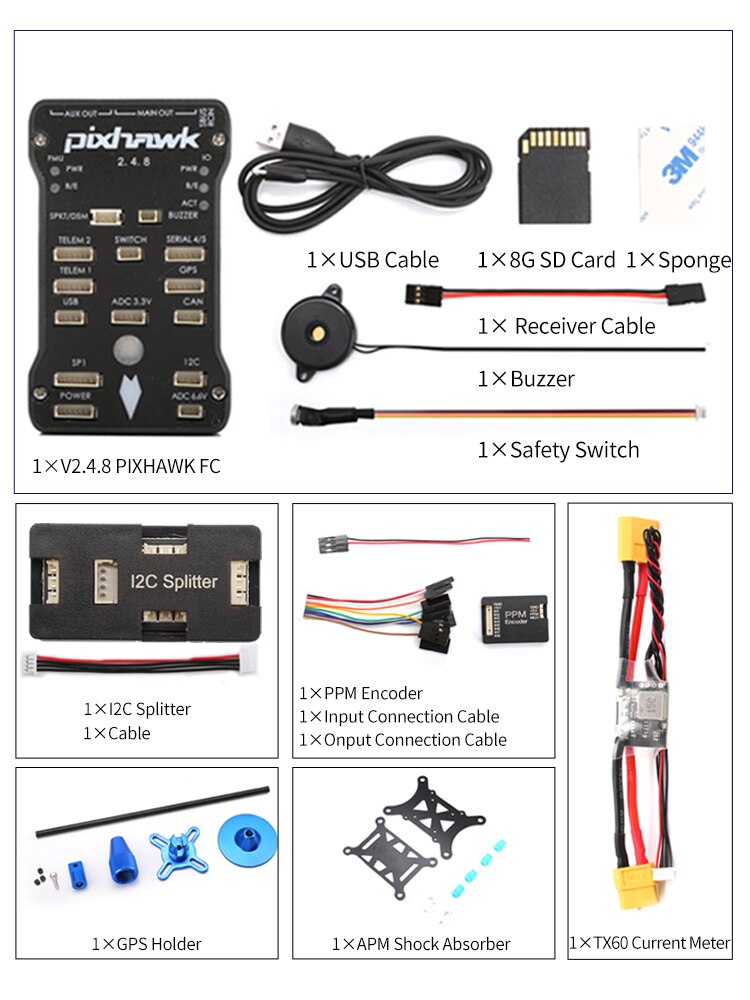
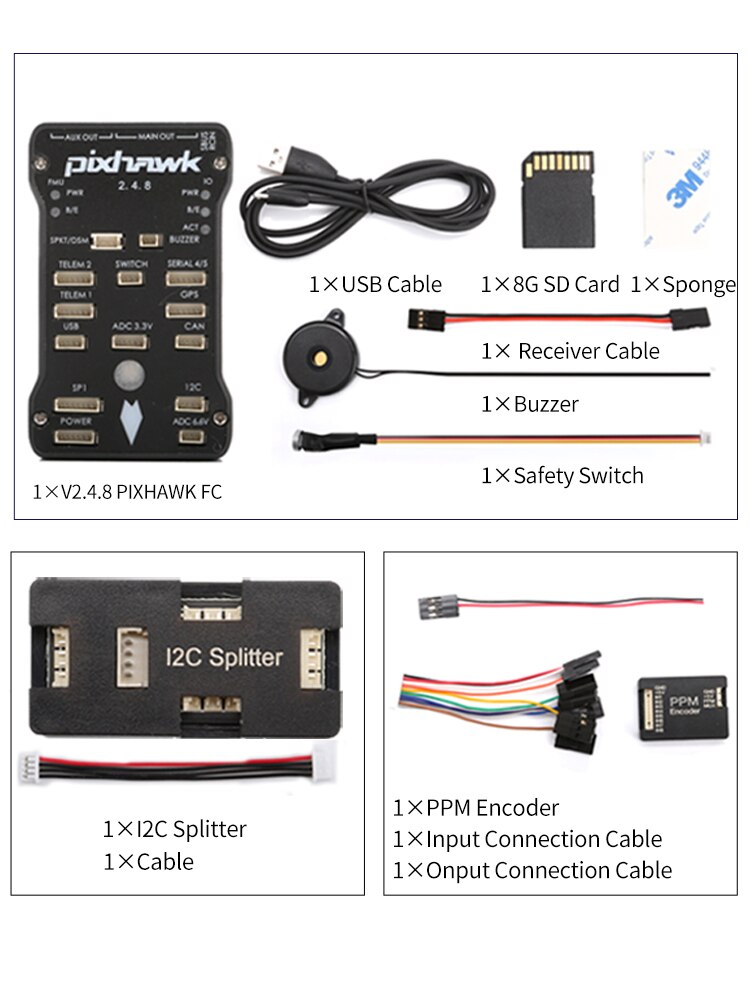
Pixhawk PX4 PIX 2.4.8 32 Bit Kawalan Penerbangan - FC M8N GPS 8G SD Buzzer PPM I2C Splitter Untuk RC FPV Pesawat Drone Quadcopter Bot Kereta
Pixhawk PX4 PIX 2.4.8 32 Bit Kawalan Penerbangan - FC M8N GPS 8G SD Buzzer PPM I2C Splitter Untuk RC FPV Pesawat Drone Quadcopter Bot Kereta
RCDrone
Tidak dapat memuatkan ketersediaan pengambilan
Pixhawk PX4 PIX 2.4.8 32 Bit SPESIFIKASI Kawalan Penerbangan
Gunakan: Kenderaan & Alat Mainan Kawalan Jauh
Tingkatkan Bahagian/Aksesori: Kawalan Penerbangan
Bekalan Alat: Kategori Pemasangan
Peranti/Peranti Kawalan Jauh: Kawalan Penerbangan
Syorkan Umur: 14+y
Bahagian & Aksesori RC: Kawalan Penerbangan
Kuantiti: 1 pcs
Asal: Tanah Besar China
Nombor Model: PIX2.4.8
Bahan: Bahan Komposit
Atribut Pacuan Empat Roda: Himpunan
Untuk Jenis Kenderaan: Kapal Terbang
Nama Jenama: XDRC
Penerangan:
- Pemproses berprestasi tinggi CortexM4 ARM 32 bit termaju, boleh menjalankan sistem pengendalian masa nyata RTOS NuttX;
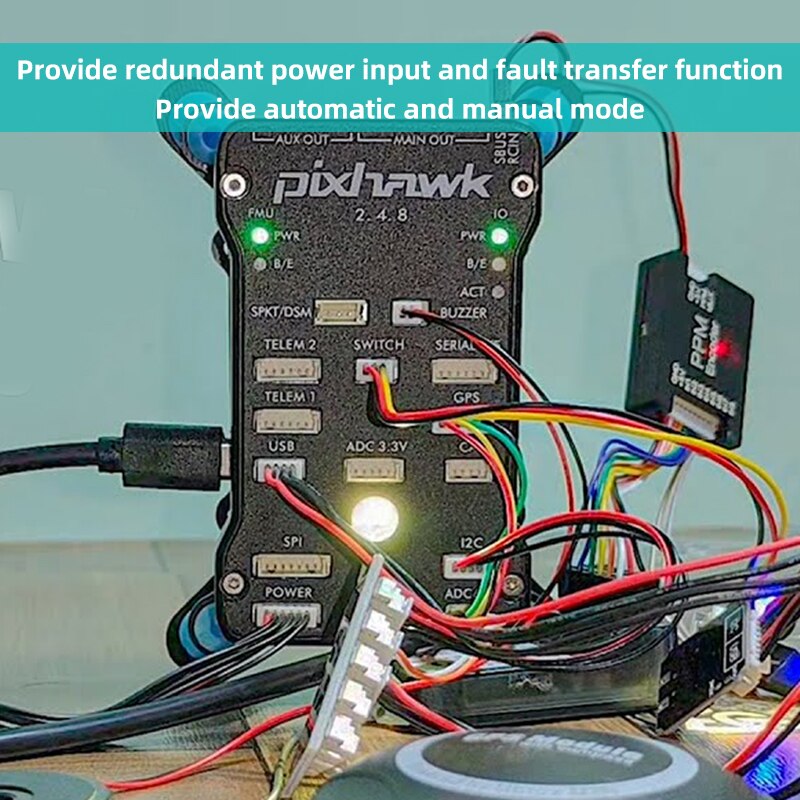
- Bekalan kuasa sandaran bersepadu dan pengawal sandaran kegagalan, pengawal utama boleh selamat ditukar kepada kawalan sandaran;
- Menyediakan input kuasa berlebihan dan fungsi pemindahan kerosakan;
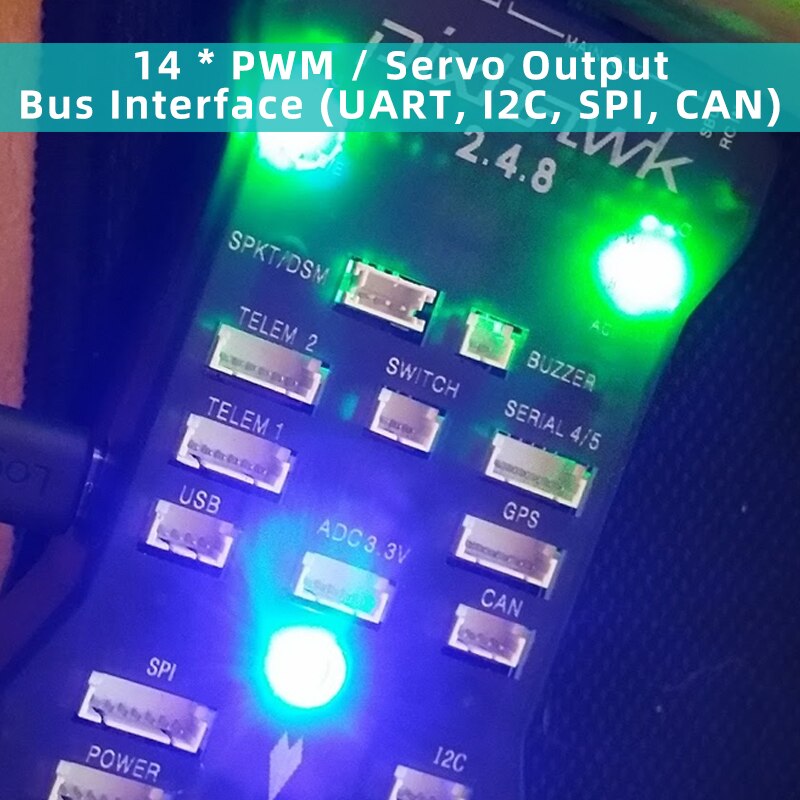
- 14 * PWM / output servo;
- Antara muka bas (UART, I2C, SPI, CAN);
- Sediakan mod automatik dan manual;
- Lampu LED berwarna;
- Antara muka buzzer berbilang nada;
- Micro SD untuk merekod data penerbangan;
Spesifikasi:
Papan disepadukan dengan PX4FMU + PX4IO
Pixhawk menggunakan teknologi cip dan sensor 32 bit baharu
Pemproses:
Memori denyar 2M 32 bit STM32F427 Cortex M4, dengan unit pemprosesan titik terapung perkakasan
Frekuensi utama: 256K, 168MHZ RAM
32 bit pemproses sandaran STM32F 32 bit >
Penderia:
L3GD20 3 paksi digital 16 bit giroskop
LSM303D 3 paksi 14 bit pecutan / magnetometer
MPU6000<2MS presisi 1 meter tinggi<2MS meter 1 429 >
Antara Muka:
1. 5*UART(1*voltan tinggi yang serasi; 2*kawalan aliran perkakasan)
2. 2*BOLEH
3. Input serasi penerima satelit Spektrum DSM / DSM2 / DSM-X
4. Input dan output serasi Futaba SBUS
5. Input isyarat PPM
6. RSSI (PWM atau voltan) input
7. I2C
8. SPI
9. Input 3.3 dan 6.6VADC
10. Antara muka MICRO USB luaran



Related Collections