




ROBOTERA XHAND 1 Tangan Robot - 12 DoF, hujung jari sentuh 270°, genggaman 80N, angkat 25 Kg, EtherCAT/RS485, sedia ROS
ROBOTERA XHAND 1 Tangan Robot - 12 DoF, hujung jari sentuh 270°, genggaman 80N, angkat 25 Kg, EtherCAT/RS485, sedia ROS
ROBOTERA
Tidak dapat memuatkan ketersediaan pengambilan
Overview
ROBOTERA XHAND 1 adalah Tangan Robot dengan lima jari yang mempunyai modul sendi pemacu langsung penuh dan 12 DoF aktif. Tangan ini bersaiz seperti tangan manusia (191 mm x 94 mm x 47 mm) dan direka untuk manipulasi yang cekap dengan pengesanan sentuhan resolusi tinggi, kekuatan genggaman yang kukuh, dan antara muka mesra pemaju untuk penyelidikan dan integrasi robotik.
Ciri Utama
- Arsitektur pemacu langsung penuh dengan modul sendi yang dikendalikan oleh gear dan kawalan daya yang terintegrasi (3 di ibu jari; 9 di empat jari yang lain).
- 12 DoF aktif sepenuhnya; ayunan lateral jari telunjuk +/-15° untuk manipulasi dalam tangan yang kompleks.
- Prestasi genggaman tinggi: daya hujung jari 15N; kekuatan genggaman maksimum 80N; berat genggaman maksimum sehingga 25 Kg (telapak tangan ke atas) dan 16 Kg (telapak tangan ke kiri).
- Aktuasi berkelajuan tinggi menyokong >2Hz pengulangan buka/tutup; menunjukkan klik jari sehingga 10 CPS (Klik Per Saat).
- 270° liputan sentuhan hujung jari dengan lima sensor array sentuhan tiga dimensi; resolusi seluruh tangan 12x10 setiap hujung jari x 5.
- Pengesanan daya tiga dimensi termasuk daya tangensial (X dan Y); ketepatan pengulangan penempatan hujung jari +/-0.20 mm.
- Boleh dipandu belakang dengan redaman <= 0.1 Nm; kawalan daya gelung semasa dan kawalan daya-posisi untuk interaksi yang mematuhi.
- Konektiviti mesra pemaju: EtherCAT dan RS485 (USB); serasi dengan ROS1/ROS2, Ubuntu (Linux), seni bina x86 dan ARM, TwinCAT, dan lengan robotik biasa (termasuk xARM, Realman, UR).
- Ketahanan dinilai untuk 1,000,000 kitaran genggaman tanpa beban; suhu operasi -20°C ~ 60°C.
Untuk pertanyaan, sokongan integrasi, atau pembelian secara pukal, hubungi [email protected] or lawati https://rcdrone.top/.
Spesifikasi
| Parameter | Nilai |
|---|---|
| Berat | 1100 g |
| Dimensi (P x L x T) | 191 mm x 94 mm x 47 mm (Saiz tangan orang dewasa) |
| DoF Aktif (Jumlah) | 12 |
| DoF Pasif (Jumlah) | 0 |
| Peruntukan DoF | Ibu jari x 3; Jari Telunjuk x 3; Jari Tengah x 2; Jari Manis x 2; Jari Kecil x 2 |
| Aktuasi/Transmisi Ibu Jari | 3 modul sendi yang dikawal oleh gear dan kuasa |
| Aktuasi/Transmisi Empat Jari | 9 modul sendi yang dikawal oleh gear dan kuasa |
| Konfigurasi Hujung Jari | Hujung Jari Bulat atau Membulat |
| Ayunan Lateral | -15°~+15° (Telunjuk) |
| Ketepatan Penentuan Ulang Hujung Jari | +/− 0.20 mm |
| Mod Kawalan | Kawalan kedudukan (damping rendah/damping tinggi), kawalan daya gelung semasa, kawalan daya-kedudukan |
| Daya Jari | 15N |
| Kekuatan Cengkaman Maksimum (seluruh tangan) | 80N |
| Berat Genggaman Maksimum (tapak tangan kiri) | 16 Kg |
| Berat Genggaman Maksimum (tapak tangan ke atas) | 25 Kg |
| Jari Ibu Terjauh Berlawanan | Jari Kecil Pinky |
| Kelajuan Ulangan Buka/tutup | >2Hz |
| Damping Pemanduan Balik (Boleh Dipandu Balik) | <= 0.1 Nm |
| Penutup Taktile | 270° pengeliling hujung jari lima jari |
| Bilangan Sensor Taktile | Lima sensor array taktile tiga dimensi 270° yang mengelilingi lima hujung jari |
| Resolusi Taktile (seluruh tangan) | 12x10 (pengeliling 270° setiap hujung jari) x 5 |
| Dimensi Pengesanan Taktile | Pengesanan daya tiga dimensi (termasuk daya tangensial X dan Y) |
| Frekuesi Kawalan Seluruh Tangan | 83Hz |
| Kadar Komunikasi | EtherCAT: 100MHz; RS485: 3MHz |
| Parameter Pengesanan | Hujung jari: 120 daya profil tiga dimensi; Sendi: kedudukan, kelajuan, suhu, arus (tork) |
| Parameter Kawalan | Kedudukan sendi; tork sendi; pekali kekakuan sendi; pekali redaman sendi |
| Gelung Genggaman Tanpa Beban | 1,000,000 gelung |
| Julat Suhu Operasi | -20°C ~ 60°C |
| Voltan Kerja | 24V ~ 72V |
| Arus Statik | 0.15A @48V, 7W |
| Arus Maksimum | 2.5A @48V, 120W |
| Antara Muka Komunikasi | RS485 (USB), EtherCAT |
Aplikasi
- Teleoperasi: menyokong teleoperasi MR dan sarung tangan; teleoperasi Vision Pro; Manus Gloves; Pico/Meta Quest.
- Integrasi lengan robot dan humanoid: serasi dengan xARM, Realman, UR, dan lengan robot lain.
- Penelitian dan simulasi: URDF tepat, simulasi penginderaan sentuh; sesuai untuk pembelajaran penguatan dengan Isaac Gym dan Mujoco.
- Interaksi manusia-mesin dan pengoperasian alat manusia dengan kawalan daya yang mematuhi.
Manual
Xhand_adapter.stp
MH2.25_right_stp.zip
MH2.25_left_stp.zip
XHand_Control_ROS_Documentation.pdf
X-Hand_1_Product_Manual_1.0.pdf
X-Hand_1_User_Quick_Start_Instructions_1.0.pdf
Butiran

ROBOTERA XHAND1 tangan robotik dengan pemacu langsung penuh, menawarkan kebebasan sebenar dan ketangkasan yang maju.

XHAND1 oleh ROBOTERA: tangan humanoid lima jari dengan 12 darjah kebebasan, 270° sensor sentuh setiap hujung jari, 80N daya cengkaman, kapasiti beban 25kg. Direka untuk tugas kompleks dan pengendalian alat.

XHAND 1: Tangan cekap pertama dengan modul pemacu langsung setiap sendi. Menampilkan motor tanpa wayar berkuasa tinggi, pengurang dengan redaman rendah, pengod kod ketepatan, dan modul sendi terintegrasi yang dibangunkan sendiri untuk manipulasi robotik yang maju.
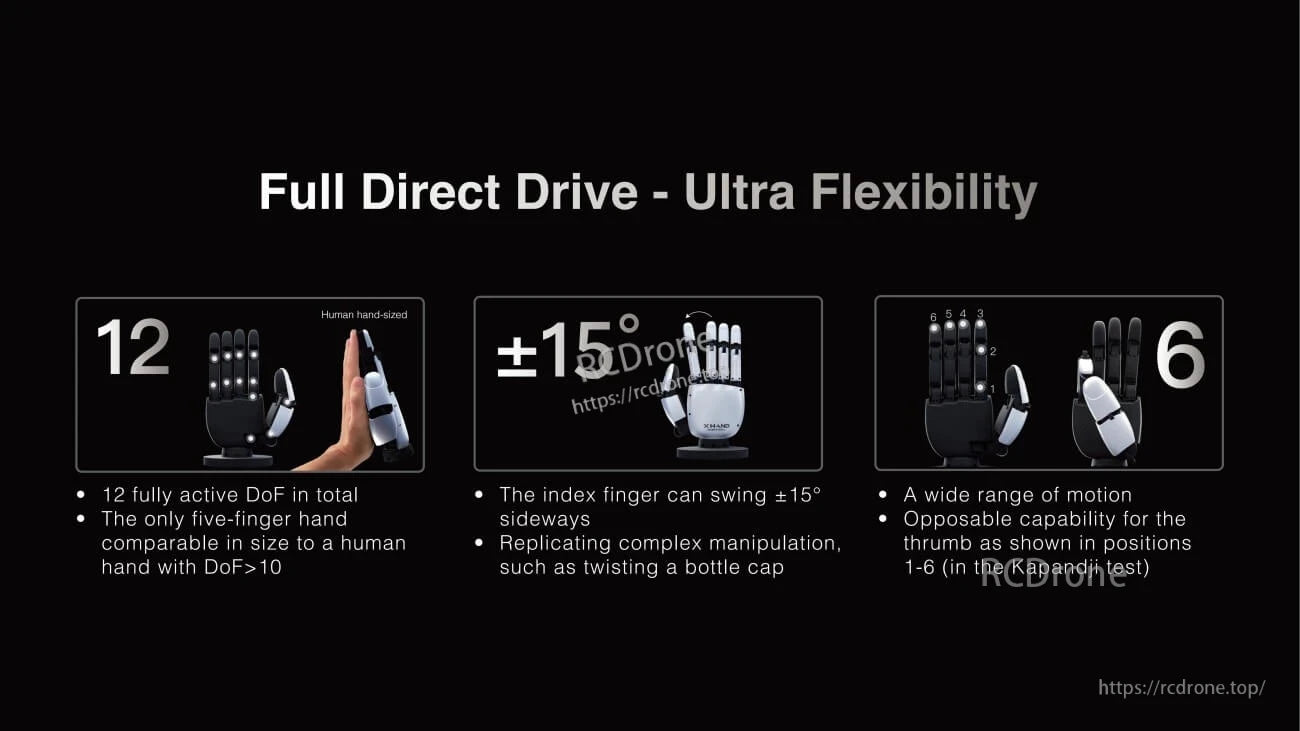
ROBOTERA XHAND 1 adalah tangan robotik bersaiz manusia yang sangat fleksibel dengan 12 DoF aktif. Jari telunjuknya berayun ±15° ke sisi untuk tugas kompleks, dan ibu jari menawarkan enam posisi yang boleh dibalikkan untuk manipulasi yang pelbagai.

ROBOTERA XHAND 1: 25kg beban, 80N kekuatan cengkaman, pemacu langsung penuh, melebihi penyelesaian pautan/tendon yang serupa.

Robot tangan Pemacu Langsung Penuh mencapai 10 CPS dengan kelajuan yang dipacu gear, tork melebihi 1 Nm, mengatasi sistem pautan dan tendon untuk prestasi permainan yang lebih baik.

ROBOTERA XHAND 1 mempunyai sensor hujung jari 270° dengan >100 titik dan ketepatan 0.05 N untuk pengesanan daya 3D, sentuhan, dan suhu, memastikan prestasi cengkaman yang unggul.
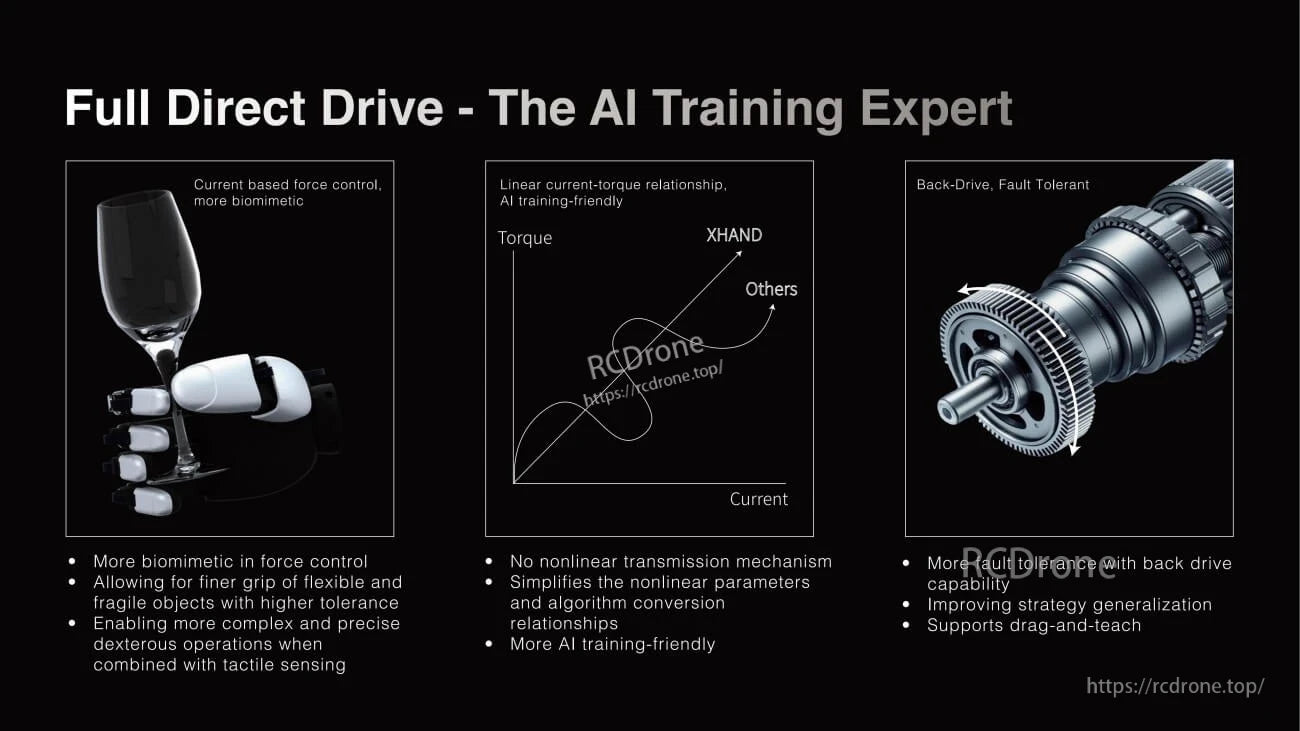
ROBOTERA XHAND 1 menawarkan kawalan daya biomimetik, tindak balas tork-arus linear untuk latihan AI, dan toleransi kesalahan pemacu belakang—membolehkan pengendalian yang tepat, algoritma yang dipermudahkan, sokongan seret-dan-ajarkan, dan penggeneralan strategi yang lebih baik.
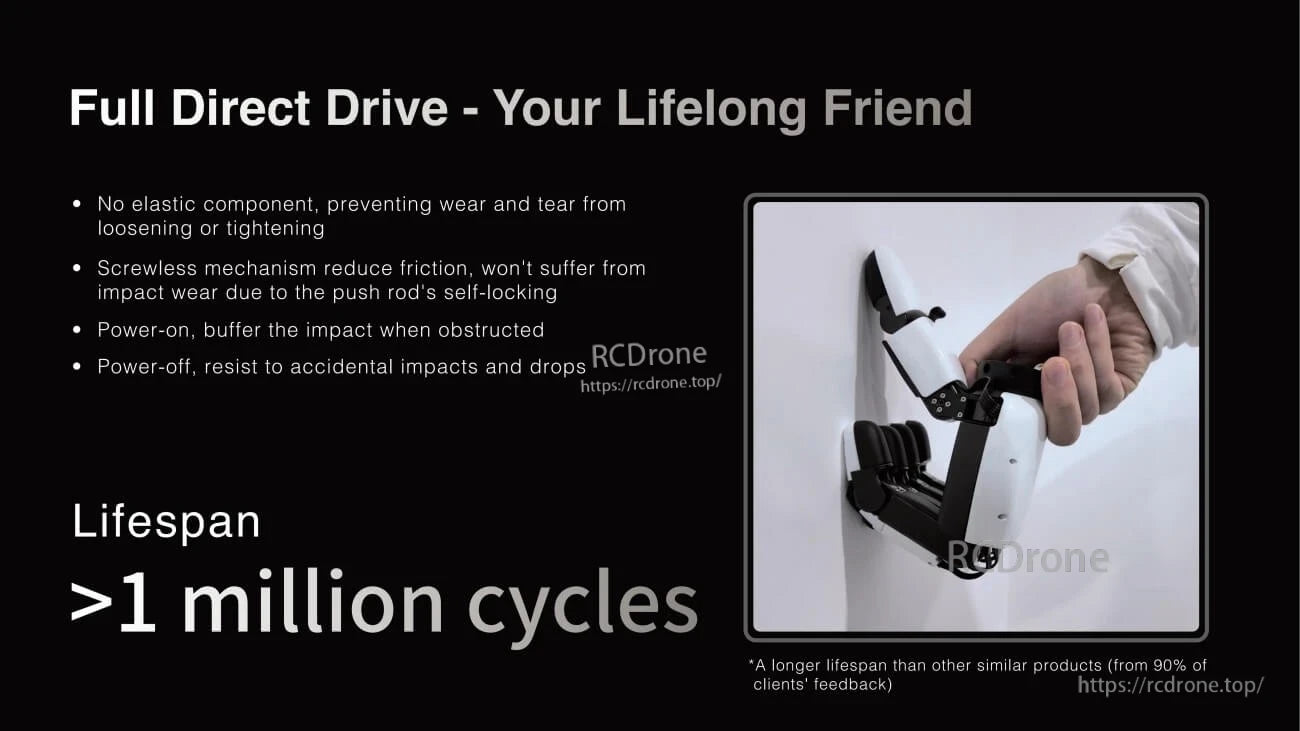
Tangan robot Direct Drive penuh menawarkan ketahanan tanpa bahagian elastik atau skru, penampan impak apabila dihidupkan, ketahanan jatuh apabila dimatikan, dan jangka hayat melebihi satu juta kitaran—melebihi produk serupa berdasarkan maklum balas pelanggan.

ROBOTERA XHAND 1 menyokong teleoperasi MR dan sarung tangan, serasi dengan ROS1/ROS2 dan Ubuntu pada x64/ARM. Menampilkan EtherCAT/TwinCAT/RS485 untuk integrasi dengan xARM, Realman, lengan robot UR. Menawarkan pemodelan URDF yang tepat dan simulasi pengesanan sentuhan. Direka untuk aplikasi robotik mesra pemaju dengan fleksibiliti pelbagai platform dan protokol kawalan yang maju.
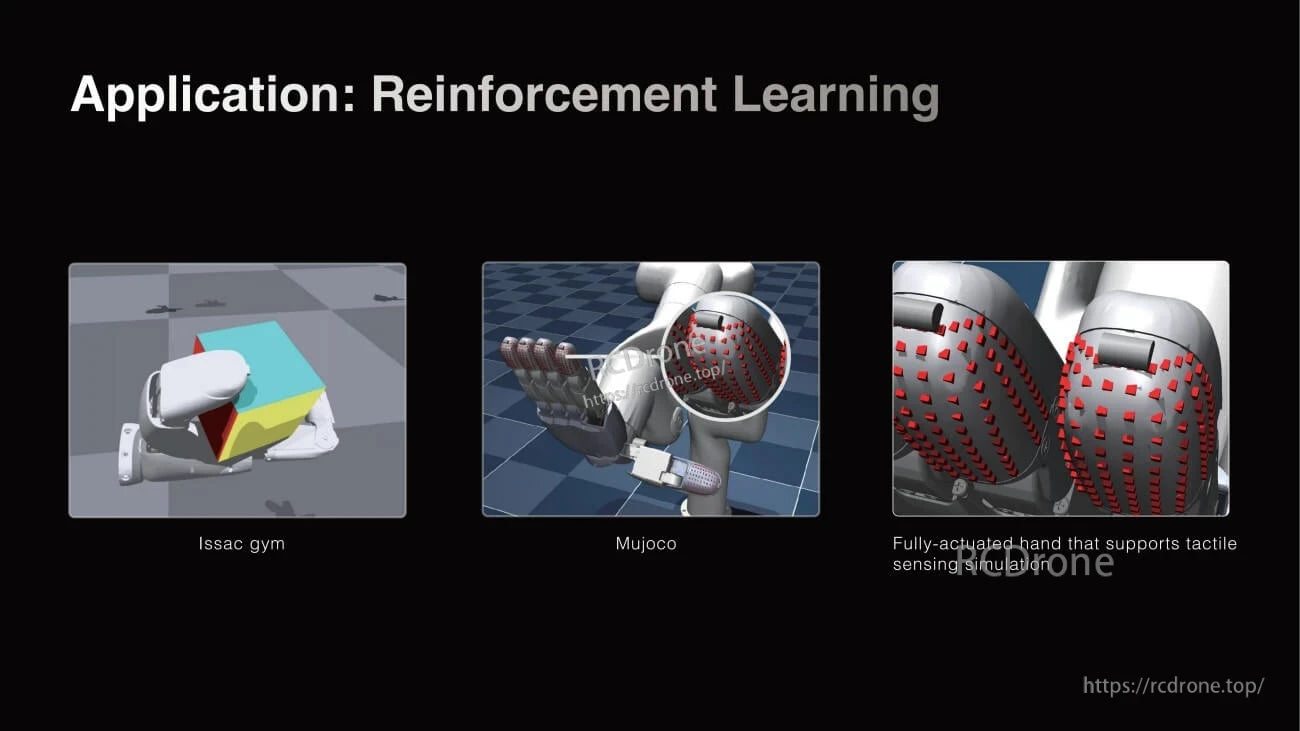
Aplikasi pembelajaran pengukuhan: Issac gym, Mujoco, dan tangan yang sepenuhnya diaktifkan dengan simulasi pengesanan sentuhan untuk kawalan robotik dan persekitaran latihan yang maju.
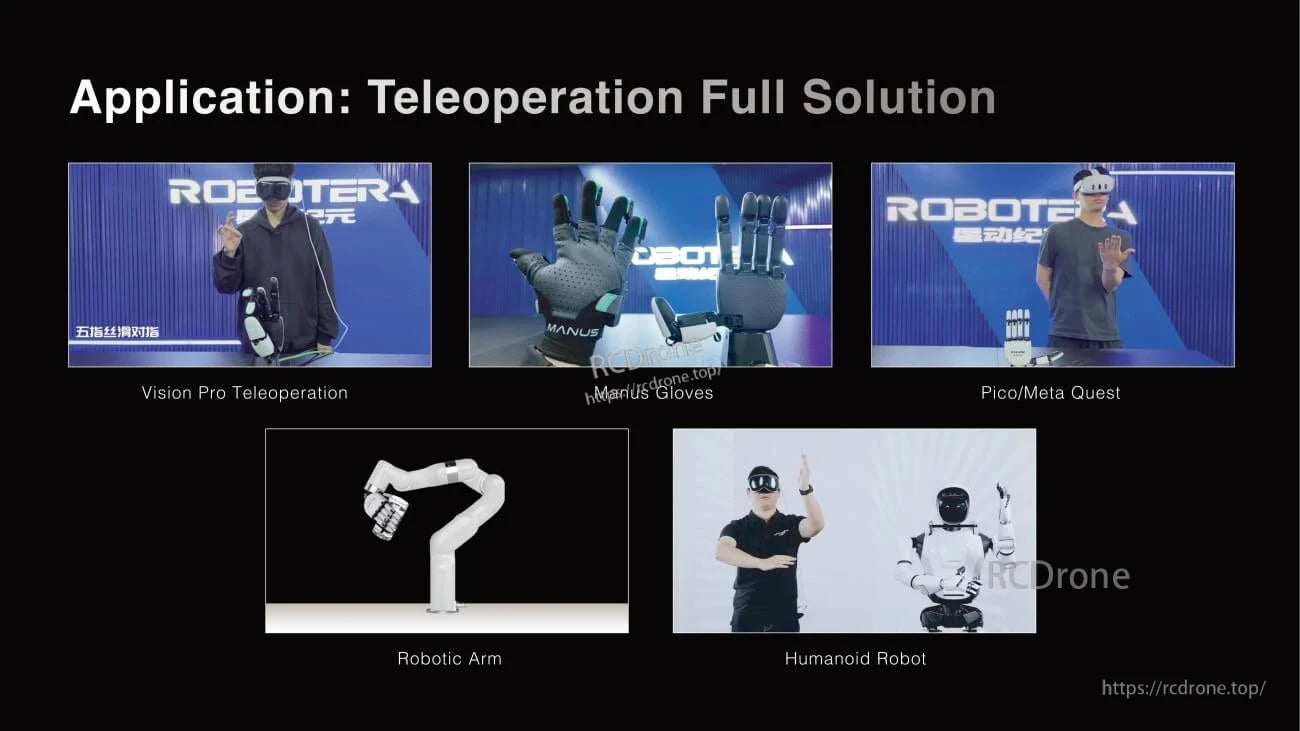
Penyelesaian teleoperasi penuh yang menampilkan Vision Pro, Manus Gloves, Pico/Meta Quest, lengan robot, dan robot humanoid untuk kawalan jauh yang maju.
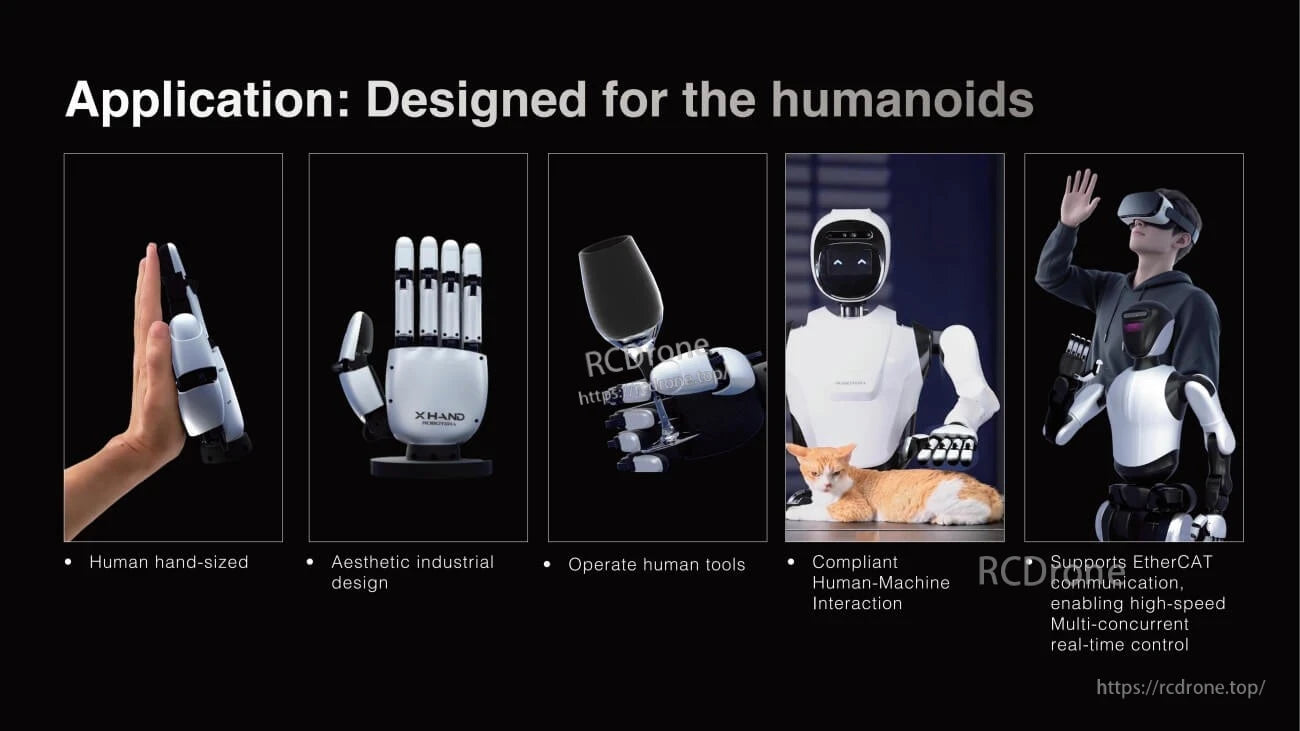
Tangan robot bersaiz manusia dengan reka bentuk estetik, mengendalikan alat, membolehkan interaksi yang mematuhi, menyokong EtherCAT untuk kawalan masa nyata.
Related Collections




