






Rotorflight HELI405 RF Pengawal Penerbangan untuk Helikopter FBL, Giroskop Berasaskan Betaflight, Sokongan PPM/Spektrum/FrSky, ESC DShot
Rotorflight HELI405 RF Pengawal Penerbangan untuk Helikopter FBL, Giroskop Berasaskan Betaflight, Sokongan PPM/Spektrum/FrSky, ESC DShot
Flywing
Tidak dapat memuatkan ketersediaan pengambilan
Overview
Rotorflight HELI405 RF adalah Pengawal Penerbangan yang direka untuk helikopter RC rotor tunggal tradisional dan sistem heli FBL. Ia menjalankan Rotorflight (berdasarkan Betaflight) dan mengintegrasikan gyro ICM‑42688, barometer SLP‑06 dan log Flash 16M, menawarkan kawalan gabenor yang maju untuk mengekalkan kelajuan kepala yang tetap, telemetri yang kaya, dan sokongan untuk motor ekor atau pemasangan servo ekor. Ia menyokong protokol ESC DShot, Multishot, Oneshot dan PWM dan berfungsi dengan penerima arus perdana termasuk PPM, Spektrum, FrSky, CRSF, XBus, ELRS, SBUS dan iBus.
Bahan yang disediakan juga menunjukkan ESC 2‑dalam‑1 60A yang serasi (Li‑Po 3–6S, Hanya DShot, 7.4V 5A S‑BEC) digunakan dengan pengawal ini untuk membantu mengekalkan kelajuan kepala yang tetap. Penyesuaian elektrik D‑shot kepada firmware Bluejay disokong.
Ciri Utama
- Firmware Rotorflight (berdasarkan Betaflight) dioptimumkan untuk helikopter; boleh disesuaikan dari pemancar melalui skrip Lua.
- ICM‑42688 gyro dan SLP‑06 barometer dengan 16M Flash Blackbox untuk merekod data penerbangan.
- Fungsi Gabenor untuk mengekalkan kelajuan kepala yang tetap; menyokong protokol ESC PWM, Oneshot, Multishot dan DShot.
- Telemetri: FrSky, HoTT, S.Port, MSP, EDGEXT\ ELRS, dan lain-lain.
- Sokongan penerima: PPM, Spektrum (DSM), FrSky, CSRF/CRSF, XBus, ELRS, SBUS, iBus.
- Sokongan motor ekor atau servo ekor (760us/1520us), termasuk motor ekor dua hala melalui DShot.
- Pelbagai jenis kadar dan konfigurasi lengkung visual; dua mod penyelamatan bagi setiap konfigurasi Rotorflight.
- Lebih banyak IO: port UART dan GPS khusus, ditambah barometer terbina dalam. Nota: Fungsi GPS sedang dalam pembangunan (tertakluk kepada maklumat rasmi Rotorflight).
- Telemetri/Lua di lapangan dengan OpenTX 2.3.12 atau EdgeTX 2.5.0 atau yang lebih baru.
Port dan penyambung
- Port yang dilabel: DSM, GPS, Micro USB, UART, SBUS, S1/S2/S3 (servo swash), TAIL, ESC, RPM, pengesanan voltan (5–30V).
- Definisi plug (mengikut bahan yang disediakan): plug 3P wayar tunggal = isyarat motor ekor; 3P = isyarat motor utama; plug 1.25 = talian pengesanan voltan (output voltan bateri langsung). Sila gunakan dengan berhati-hati.
- Motor utama dan motor ekor menggunakan plug MR30.
Pilihan ESC yang serasi (daripada bahan yang disediakan)
- 2‑dalam‑1 60A ESC; Li‑Po 3–6S; Hanya DShot; 7.4V 5A S‑BEC.
- Direka untuk mengekalkan kelajuan kepala yang tetap; penstabilan PWM ESC tersedia melalui talian RPM.
Spesifikasi
| CPU | STM32F405RGT6 |
| Gyro | ICM‑42688 |
| Baro | SLP‑06 |
| Flash | 16M Flash |
| IO | UART*1, GPS*1, DSM*1, PWM*5, SBUS*1, Pengesanan voltan*1 (5–30V), RPM*1 |
| Firmware | Rotorflight |
| Penerima | PPM, Spektrum, FrSky, CSRF, XBus, ELRS, Sbus, ibus ... |
| Telemetri | FrSky, HoTT, S.Port, MSP, EDGEXT\ ELRS ... |
| ESC | PWM, Oneshot, Multishot, DShot ... |
| Mod ekor | Motor ekor; 760us/1520us Servo |
| Saiz | 43mm*22mm*14mm |
| Berat | 17g (Termasuk penutup) |
Aplikasi
- Helikopter RC rotor tunggal tradisional dan binaan heli FBL
- Persediaan penerbangan 3D yang memerlukan pengawal, penapisan gyro lanjutan dan telemetri
- Platform yang menggunakan motor ekor atau kawalan servo ekor
Butiran
Sistem heli FBL Rotorflight HELI405 sukan. Projek helikopter sumber terbuka berdasarkan BetaFlight. Ciri-ciri termasuk motor ekor, servo ekor, ELRS, DShot ESC, telemetri, log, penyesuaian pemancar, dan penyelenggaraan kelajuan kepala yang tetap.
Rotorflight adalah perisian penerbangan berasaskan Betaflight untuk helikopter RC rotor tunggal, yang menampilkan kawalan PID lanjutan, pengawal kelajuan rotor, penapisan gyro, pencampur khusus, dan profil penerbangan.Pautan muat turun dan butiran tersedia di wiki.
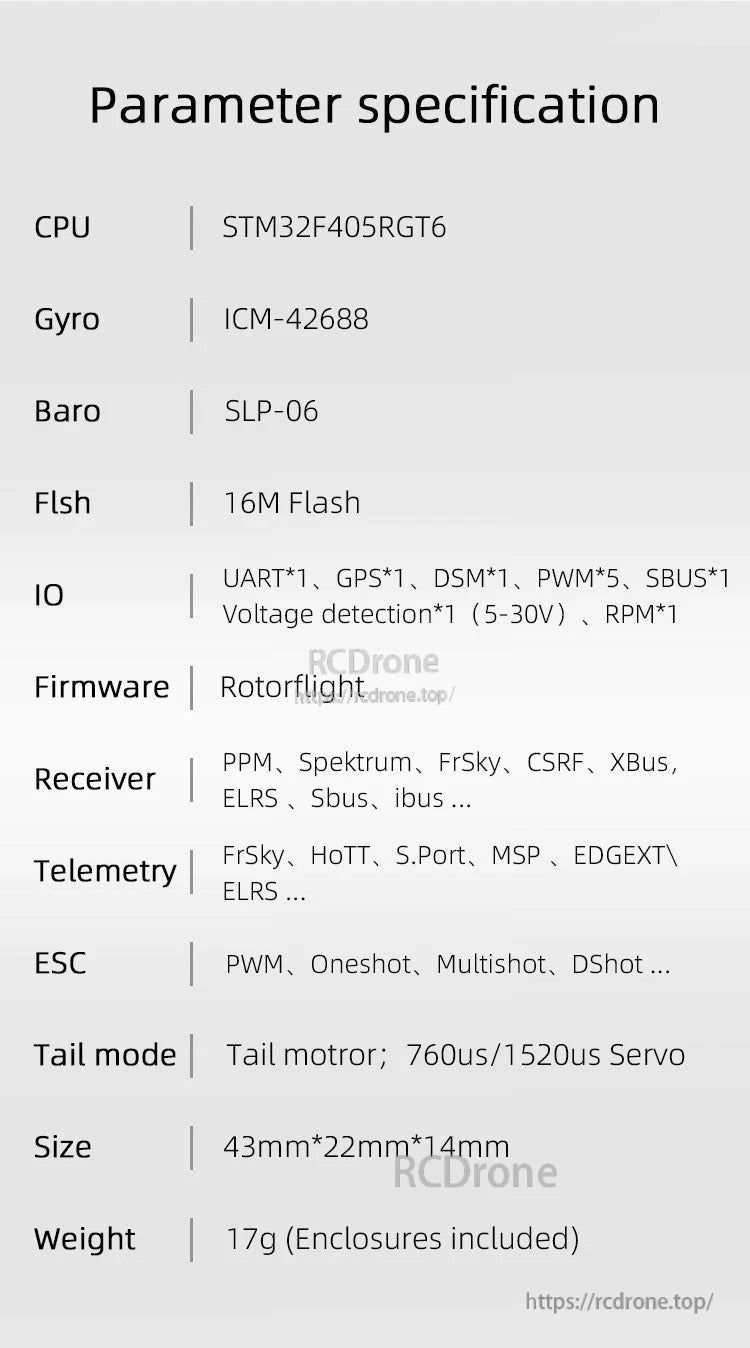
CPU STM32F405RG, gyro ICM-42688, baro SLP-06, 16M flash. Menyokong pelbagai penerima, telemetri, PWM ke DShot ESC, mod motor ekor. 43x22x14mm, 17g dengan penutup.
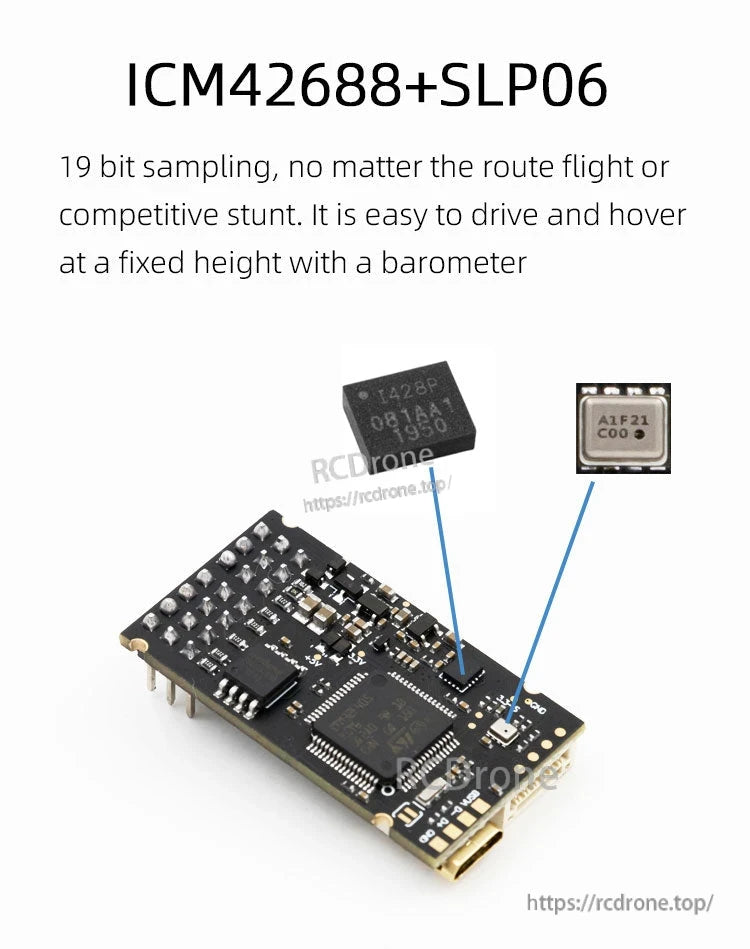
ICM42688+SLP06, pengambilan sampel 19-bit, kawalan penerbangan yang tepat, barometer untuk hover stabil, mudah untuk dipandu.

Pengawal penerbangan Heli405 mempunyai port UART dan GPS, menyokong penerima bersiri, barometer terbina dalam. GPS dalam pembangunan. Port IO tambahan untuk peningkatan masa depan. Reka bentuk kompak yang ideal untuk aplikasi drone lanjutan yang memerlukan kebolehan pengembangan dan integrasi sensor yang boleh dipercayai.

Menyokong pelbagai penerima termasuk PPM, Spektrum, FrSky, CSRF, XBus, ELRS, SBUS, iBus melalui UART, DSM, dan antara muka SBUS/PPM/iBus. Membolehkan peralihan lancar ke projek sumber terbuka Rotorflight tanpa menggantikan pengawal jauh.
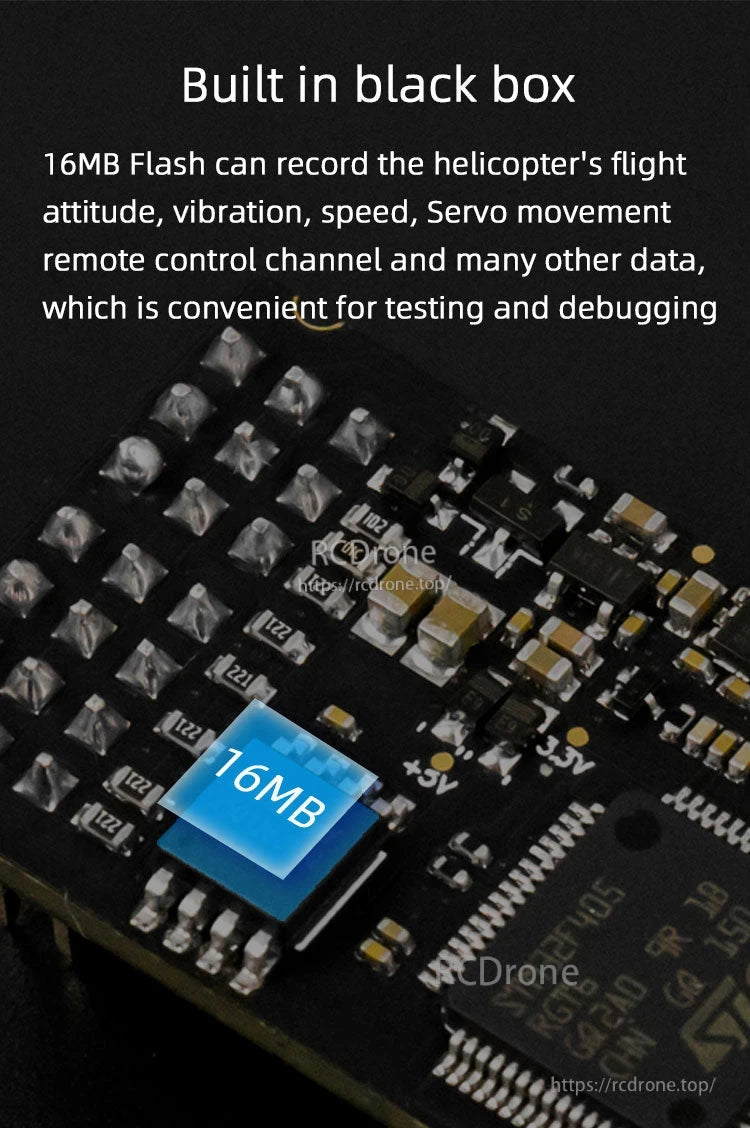
Kotak hitam terbina dalam 16MB merekod data penerbangan termasuk sikap, getaran, kelajuan, pergerakan servo, dan saluran kawalan jauh untuk ujian dan penyahpepijatan.
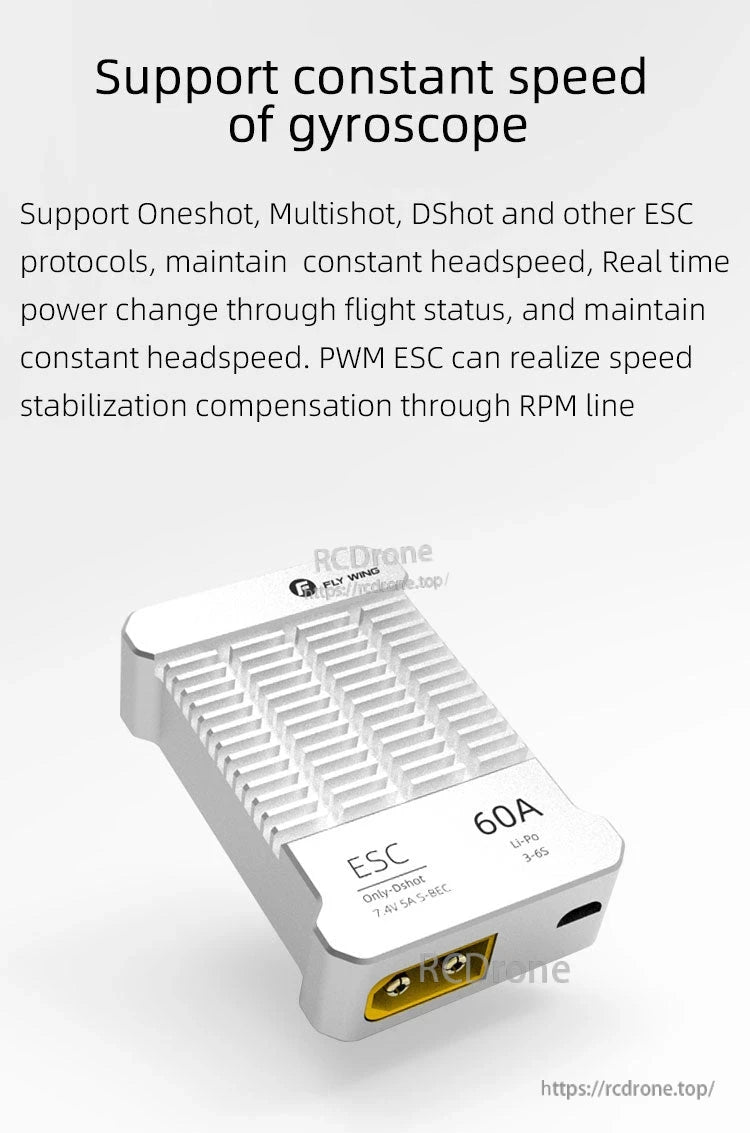
Menyokong kelajuan giroskop tetap, Oneshot, Multishot, protokol DShot. Menjaga kelajuan kepala yang tetap dengan penyesuaian kuasa masa nyata. PWM ESC membolehkan penstabilan kelajuan berdasarkan RPM. 60A ESC untuk 3-6S Li-Po.
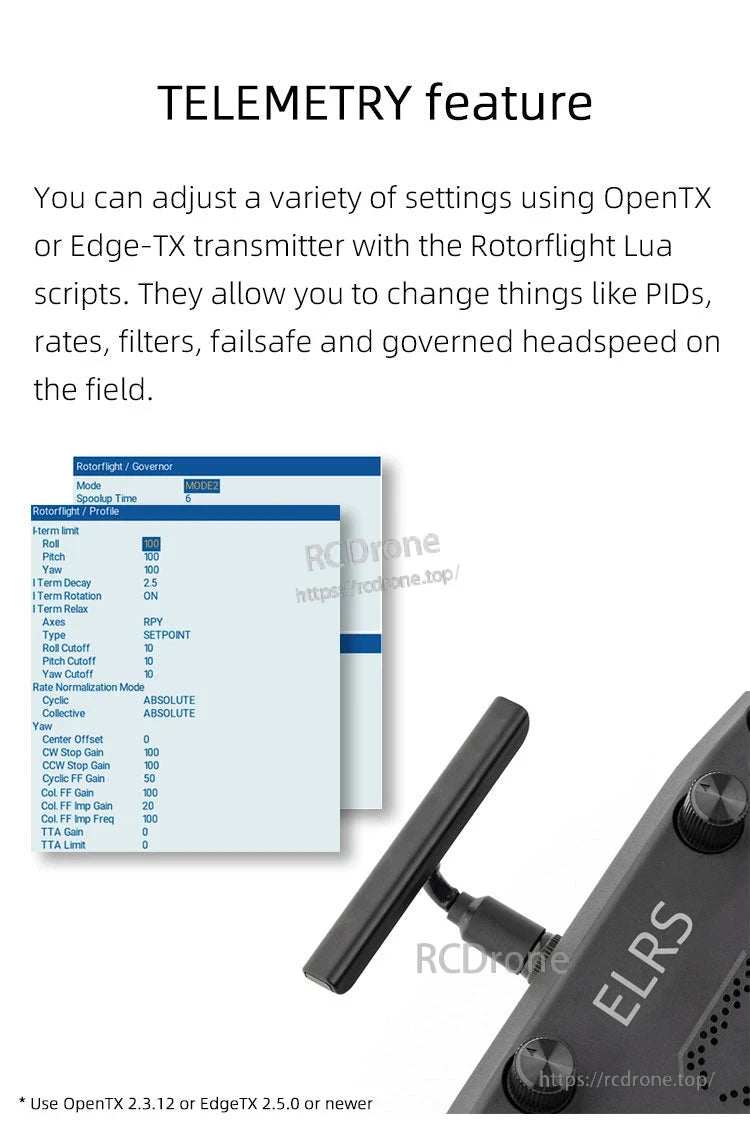
Ciri TELEMETRI membolehkan penyesuaian lapangan melalui OpenTX atau Edge-TX dengan skrip Rotorflight Lua, membolehkan kawalan PID, kadar, penapis, failsafe, dan kelajuan kepala. Serasi dengan OpenTX 2.3.12 atau EdgeTX 2.5.0+.
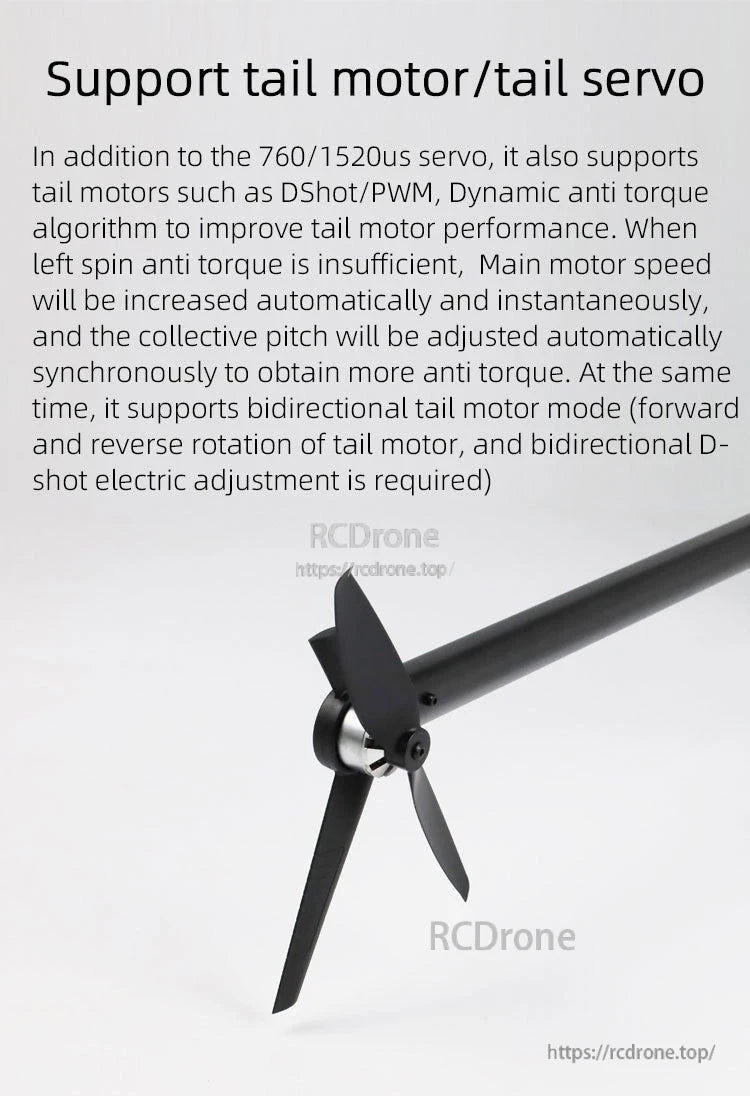
Menyokong sistem motor ekor dan servo, termasuk servo 760/1520us dan motor ekor DShot/PWM. Menampilkan algoritma anti-tork dinamik yang secara automatik meningkatkan kelajuan motor utama dan menyesuaikan pitch kolektif untuk meningkatkan anti-tork semasa putaran kiri.Membolehkan operasi motor ekor dua hala untuk putaran ke hadapan dan ke belakang, memerlukan kawalan kelajuan elektronik D-shot dua hala. Meningkatkan prestasi motor ekor dan kestabilan penerbangan dengan logik kawalan yang canggih. Direka untuk ketepatan dan responsif dalam keadaan penerbangan yang mencabar, memastikan kawalan yaw yang lebih lancar dan dinamik helikopter yang lebih baik. Dioptimumkan untuk helikopter RC berprestasi tinggi yang memerlukan pengurusan tork yang boleh dipercayai dan integrasi yang lancar dengan sistem digital moden.
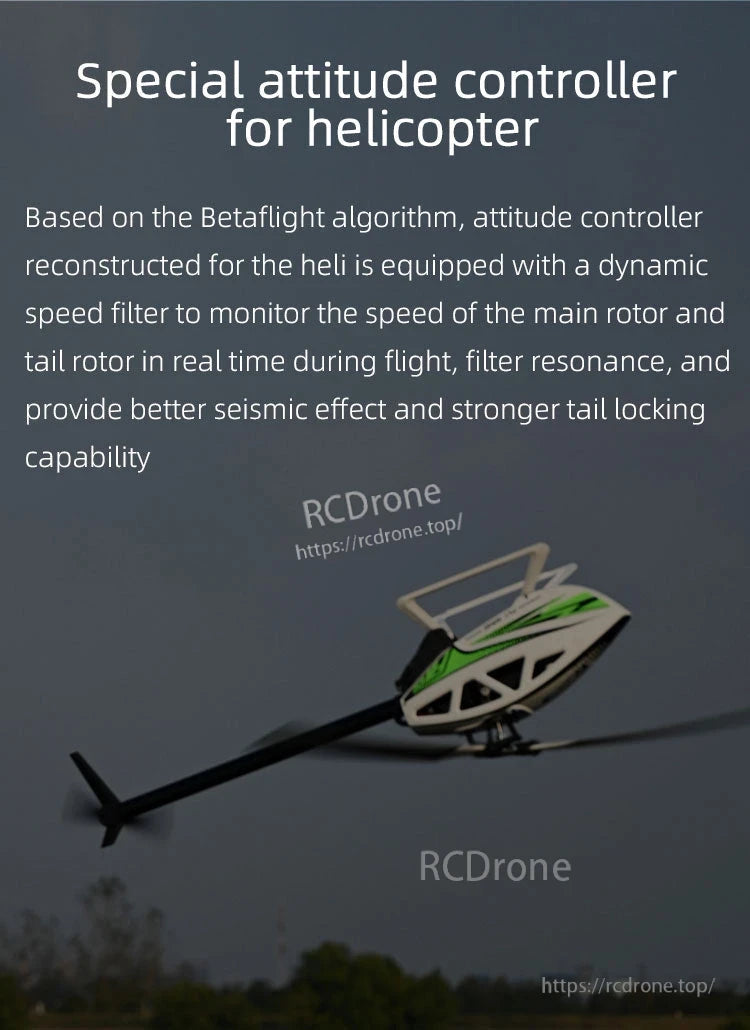
Pengawal sikap khas untuk helikopter menggunakan algoritma Betaflight dengan penapis kelajuan dinamik untuk pemantauan rotor masa nyata, penapisan resonans, dan kestabilan yang dipertingkatkan.
Ciri-ciri yang akan datang termasuk data ESC Hobbywing atau K-ESC, seperti voltan, arus, dan kelajuan, dipaparkan pada skrin pemancar. Penyelamatan automatik tanah lembut GPS dan kembali juga akan datang tidak lama lagi.
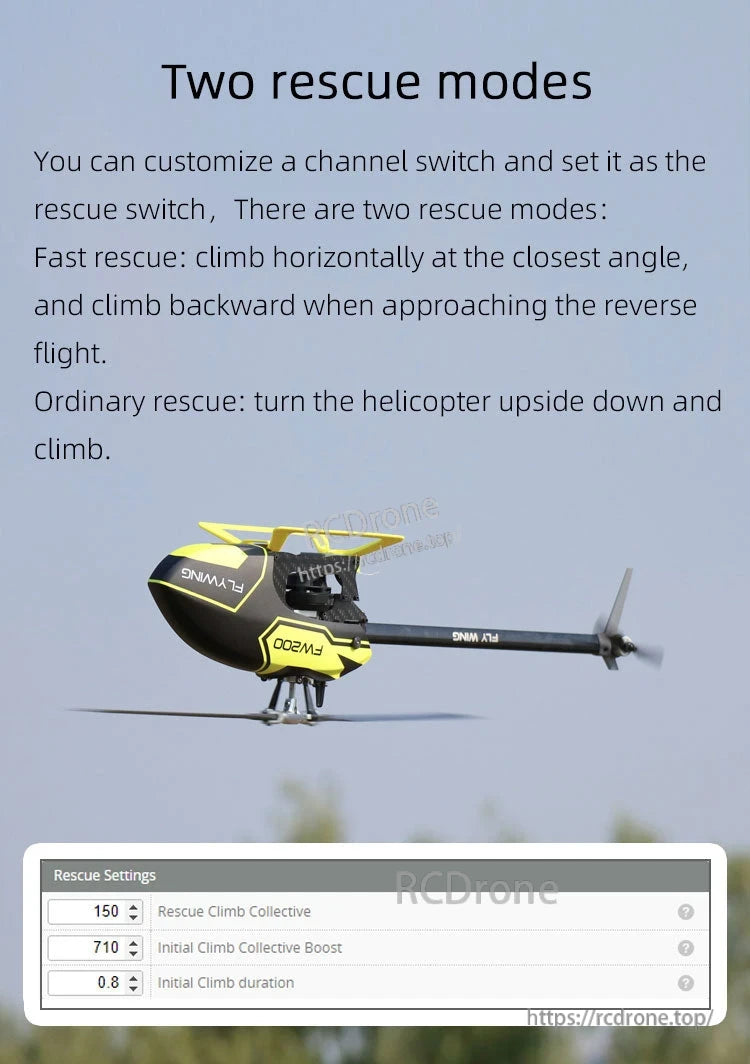
Dua mod penyelamatan: penyelamatan cepat mendaki secara mendatar kemudian ke belakang; penyelamatan biasa membalikkan helikopter terbalik. Suis saluran yang boleh disesuaikan. Tetapan termasuk kolektif pendakian, dorongan, dan tempoh.
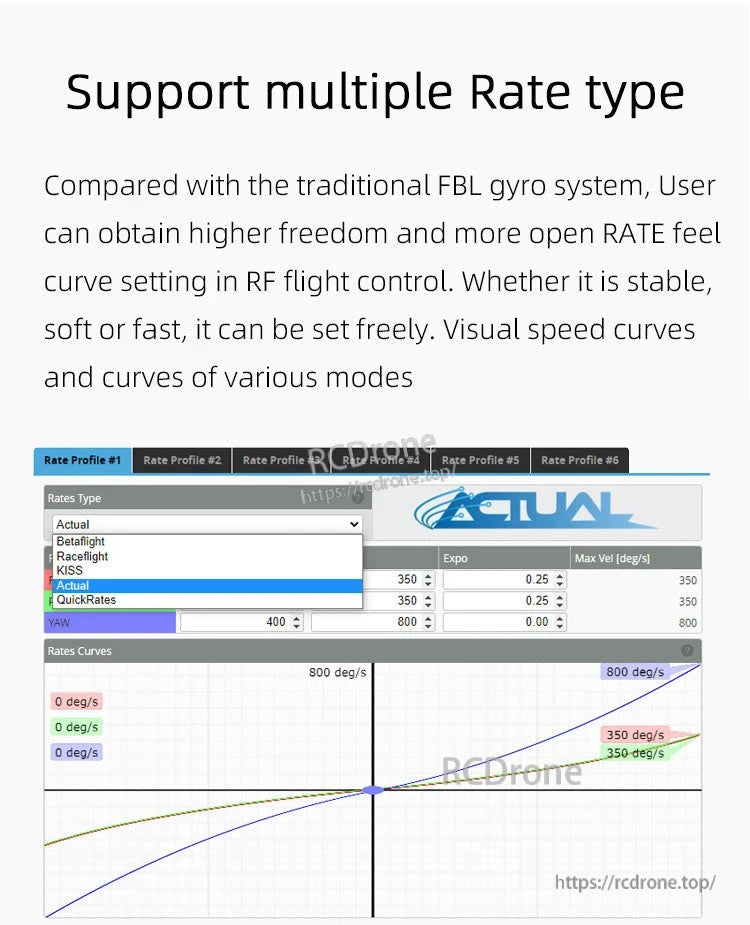
Menyokong pelbagai jenis kadar, lengkung rasa RATE yang boleh disesuaikan, lengkung kelajuan visual, dan profil mod dengan expo yang boleh disesuaikan dan kelajuan maksimum untuk kawalan penerbangan yang stabil, lembut, atau cepat.
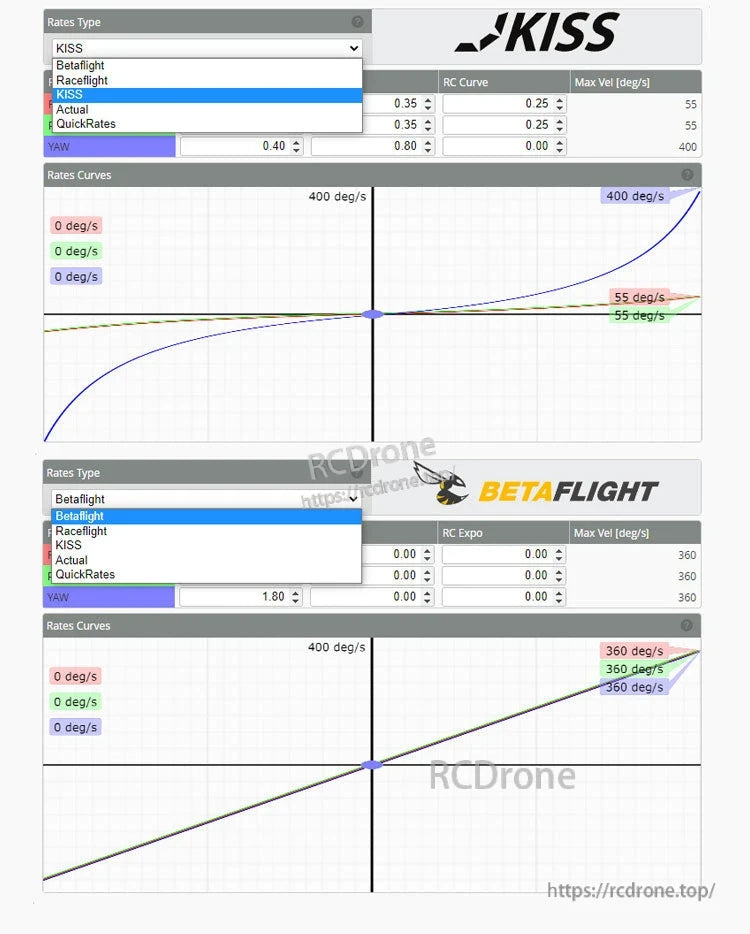
Kadar lengkung KISS Betaflight RC dengan kelajuan maksimum dalam darjah. Nilai sebenar adalah 0.35 dan 0.25 untuk kadar cepat. Kadar yaw adalah 0.40, 0.80, dan 0.00. Kadar lengkung empat saluran tersedia pada 400 darjah sesaat.
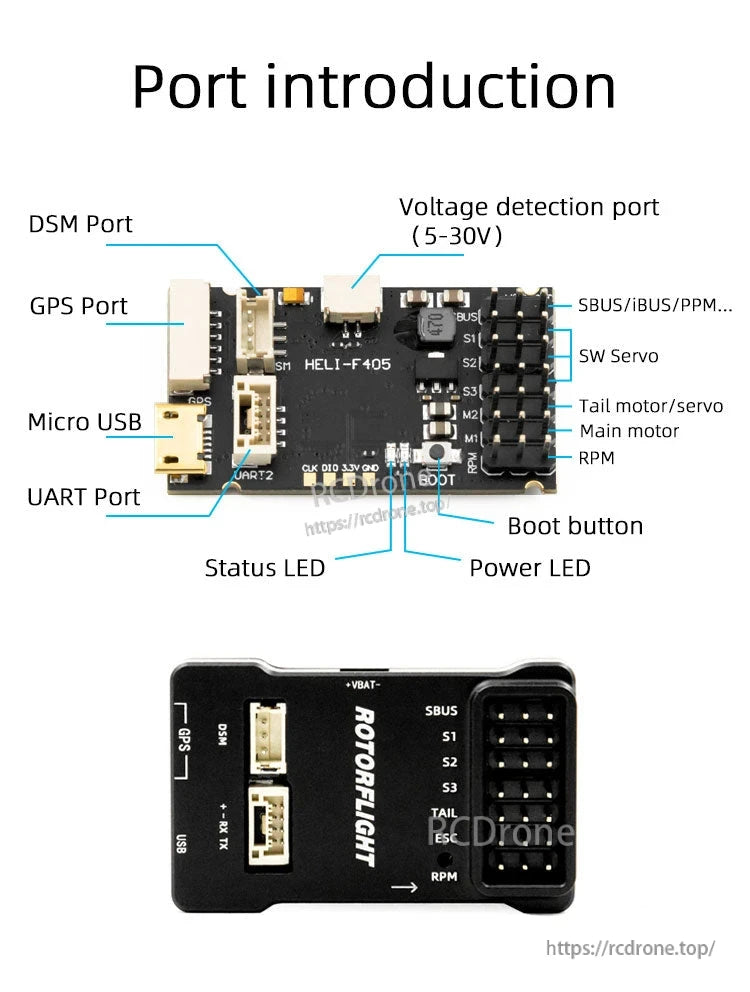
Pengawal penerbangan Rotorflight HELI-F405 menyokong DSM, GPS, Micro USB, UART, pengesanan voltan 5-30V, SBUS/iBUS/PPM, output servo dan motor, pemantauan RPM, butang but, dan LED status/kuasa.
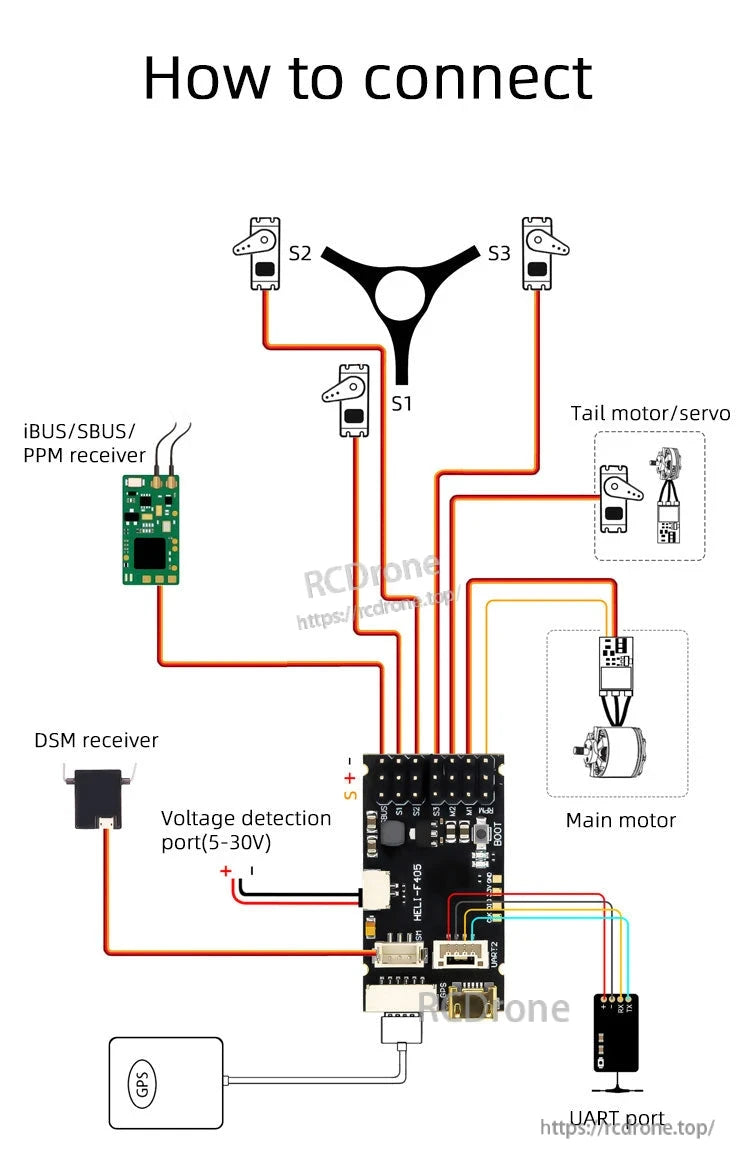
Rajah sambungan untuk pengawal penerbangan HELI-P405 dengan penerima, motor, GPS dan UART.
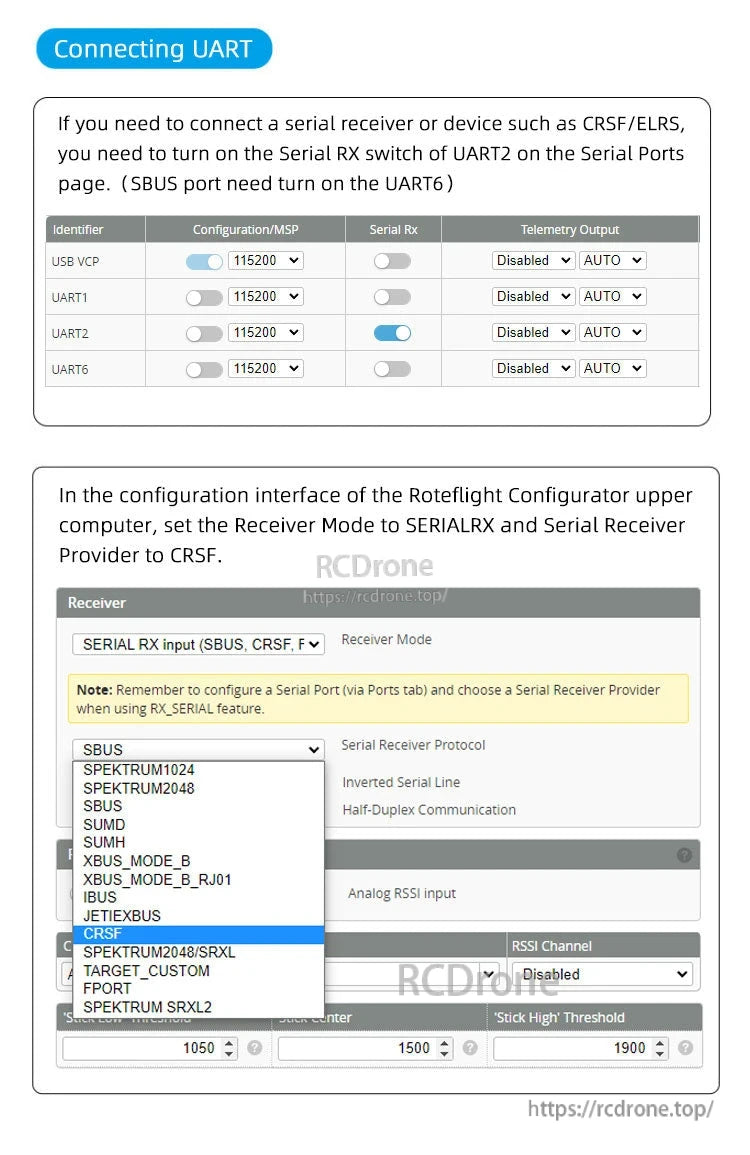
Konfigurasikan UART2 untuk penerima siri CRSF/ELRS melalui Port Siri. Tetapkan Mod Penerima kepada SERIALRX dan Penyedia Penerima Siri kepada CRSF dalam Konfigurator Rotorflight. Aktifkan Rx Siri UART2 dan pilih CRSF dari senarai dropdown.
Related Collections







