









Modul sendi robot kecil SteadyWin GIM3510-8, gear planetari 8:1, pemacu CAN, dwi pengekod, 24V 60W
Modul sendi robot kecil SteadyWin GIM3510-8, gear planetari 8:1, pemacu CAN, dwi pengekod, 24V 60W
SteadyWin
Tidak dapat memuatkan ketersediaan pengambilan
Overview
Modul sendi robot kecil SteadyWin GIM3510-8 adalah penggerak sendi robotik terintegrasi yang menggabungkan motor Aloha, pengurang gear planet 8:1, pemacu komunikasi terbina dalam, dan pengod encoders ganda dalam pakej silinder yang padat. Dengan bekalan nominal 24 V (jangka lebar 12–40 V atau 12–48 V bergantung pada papan pemacu), kelajuan output tinggi sehingga 564.6 rpm selepas pengurangan, dan komunikasi bas CAN, ia direka untuk robot humanoid yang lincah, lengan robot, platform bergerak, dan sistem multi-paksi lain yang memerlukan kawalan gerakan tertutup yang tepat.
Ciri Utama
- Pengurangan planet berkelajuan tinggi: Gearbox planet 8:1 dengan kelajuan output yang dinilai 535.5 rpm dan maksimum 564.6 rpm (GDZ34), sesuai untuk sendi yang bergerak pantas.
- Julat voltan yang luas: Operasi nominal 24 V dengan julat input 12–40 V (GDZ34) atau 12–48 V (GDS34) untuk reka bentuk sistem kuasa yang fleksibel.
- Pengeluaran tork yang cekap: Pemalar tork sehingga 0.32 N.m/A dengan tork yang dinilai sehingga 1.68 N.m dan tork puncak sehingga 6.02 N.m, menyediakan penghantaran kuasa yang cekap untuk sendi robotik tugas ringan hingga sederhana.
- Pemandu terintegrasi dengan bas CAN: Papan pemandu terbina dalam (GDS34 atau GDZ34) menyokong komunikasi CAN untuk pengkabelan yang dipermudahkan dan kawalan berangka.
- Maklum balas pengodak dwi: Pengodak 14-bit pada pemandu dan pengodak kedua pada aci output untuk maklum balas kedudukan dan kelajuan yang tepat.
- Struktur padat: Hanya 46 mm diameter luar dengan panjang keseluruhan dari 46.5 mm (tanpa pemandu) hingga 51.5 mm (dengan pemandu), membolehkan susun atur pelbagai sendi yang padat.
- Ketahanan persekitaran: Penarafan perlindungan IP54, suhu operasi dari -20°C hingga +80°C, dan tahap bunyi di bawah 60 dB.
- Fungsi perlindungan: Perlindungan terhadap suhu berlebihan, voltan berlebihan, dan beban berlebihan membantu mengekalkan operasi yang selamat dan boleh dipercayai dalam sistem robotik tugas berterusan.
- Kebolehan mekanikal: Menyokong beban paksi sehingga 75 N dan beban radial 300 N pada aci output, dengan backlash pengurang sebanyak 15 arcmin.
- Pilihan brek tersuai: Menyokong integrasi brek tersuai untuk sendi yang memerlukan tork pegang ketika tidak berkuasa.
Untuk sokongan teknikal, penyesuaian, atau pertanyaan integrasi mengenai modul sendi robot kecil GIM3510-8, sila hubungi https://rcdrone.top/ atau emel [email protected].
Aplikasi
- Robot humanoid
- Tangan robot
- Exoskeleton
- Robot quadruped
- Kenderaan AGV
- Robot ARU
Spesifikasi
| Parameter | Unit | GIM3510-8 + GDS34 (SDC101) | GIM3510-8 + GDZ34 |
|---|---|---|---|
| Model | - | GIM3510-8 | GIM3510-8 |
| Model papan pemacu | - | GDS34 (SDC101) | GDZ34 |
| Voltan nominal | V | 24 | 24 |
| Julat voltan | V | 12–48 | 12–40 |
| Kuasa terperingkat | W | 98 | 60 |
| Tork terperingkat | N.m | 1.68 | 1.00 |
| Tork puncak | N.m | 3.41 | 6.02 |
| Kelajuan yang dinilai selepas pengurangan | rpm | 430 | 535.5 |
| Kelajuan maksimum selepas pengurangan | rpm | 529 | 564.6 |
| Arus yang dinilai | A | 4.1 | 2.5 |
| Arus puncak | A | 8.30 | 25.30 |
| Rintangan fasa | ohm | 0.48 | 0.48 |
| Induktans fasa | mH | 0.31 | 0.31 |
| Pemalar kelajuan | rpm/V | 22.04 | 23.53 |
| Pemalar tork | N.m/A | 0.44 | 0.32 |
| Bilangan pasangan tiang | Pasangan | 7 | 7 |
| Peratus gear | - | 8:1 | 8:1 |
| Jenis gear | - | Planetary | Planetary |
| Bahan gear pengurang | - | ALU | ALU |
| Backlash gear pengurang | arcmin | 15 | 15 |
| Berat motor tanpa pemacu | g | 247.6 | 247.6 |
| Berat motor dengan pemacu | g | 259.6 | 259.6 |
| Saiz tanpa pemacu (diameter x panjang) | mm | Ø46 x 46.5 | Ø46 x 46.5 |
| Saiz dengan pemacu (diameter x panjang) | mm | Ø46 x 51.5 | Ø46 x 51.5 |
| Max beban paksi | N | 75 | 75 |
| Max beban radial | N | 300 | 300 |
| Bunyi | dB | <60 | <60 |
| Komunikasi | - | CAN | CAN |
| Pengodak kedua pada aci output | - | YA | YA |
| Gred perlindungan | - | IP54 | IP54 |
| Suasana operasi | °C | -20 hingga +80 | -20 hingga +80 |
| Resolusi pengodak (pengodak pemacu) | bit | 14 | 14 |
| Sokongan pengodak berasingan | - | TIDAK | TIDAK |
| Sokongan brek khusus | - | YA | YA |
Manual
- SteadyWin_GIM3510-8_Peta_Pemasangan.stp
- GlM3510-8_pelan_pemasangan.pdf
- Gl3510-8_dengan_pelan_pemasangan_brek.pdf
Butiran

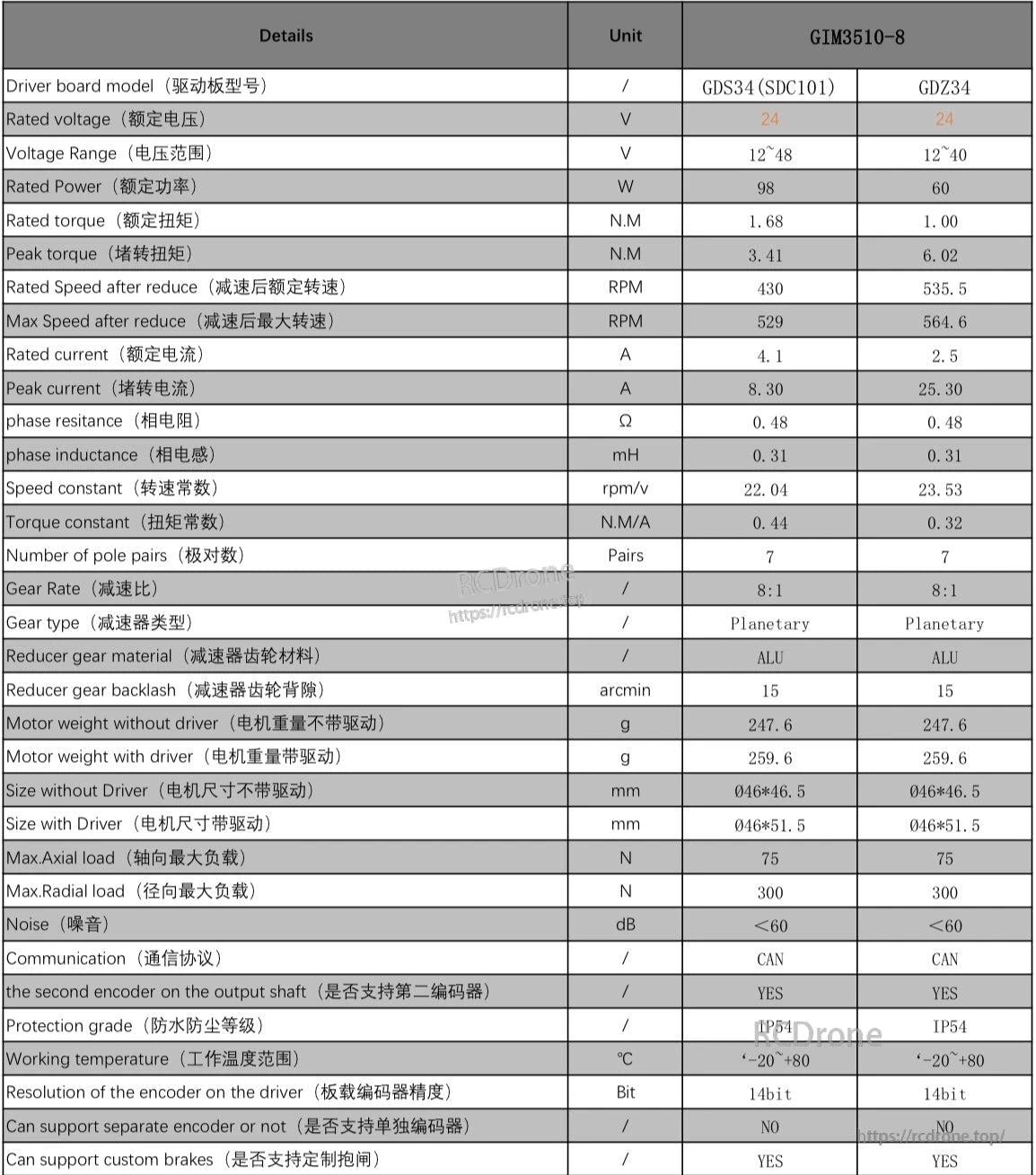
Spesifikasi sendi robot GIM3510-8 membandingkan papan pemacu GDS34 dan GDZ34. Metrik utama termasuk voltan, kuasa, tork, kelajuan, arus, berat, saiz, kapasiti beban, bunyi, komunikasi, pengod, gred perlindungan, julat suhu, dan sokongan brek khusus.
Related Collections









