CUAV RM3100 C-Compass Magnetometer Luaran Ketepatan Tinggi untuk Pixhawk PX4 ArduPilot DroneCAN/UAVCAN
CUAV RM3100 C-Compass Magnetometer Luaran Ketepatan Tinggi untuk Pixhawk PX4 ArduPilot DroneCAN/UAVCAN
CUAV
Harga biasa
$203.00 USD
Harga biasa
Harga jualan
$203.00 USD
Harga seunit
per
Taxes included.
Penghantaran dikira semasa pembayaran.
Tidak dapat memuatkan ketersediaan pengambilan
Tinjauan
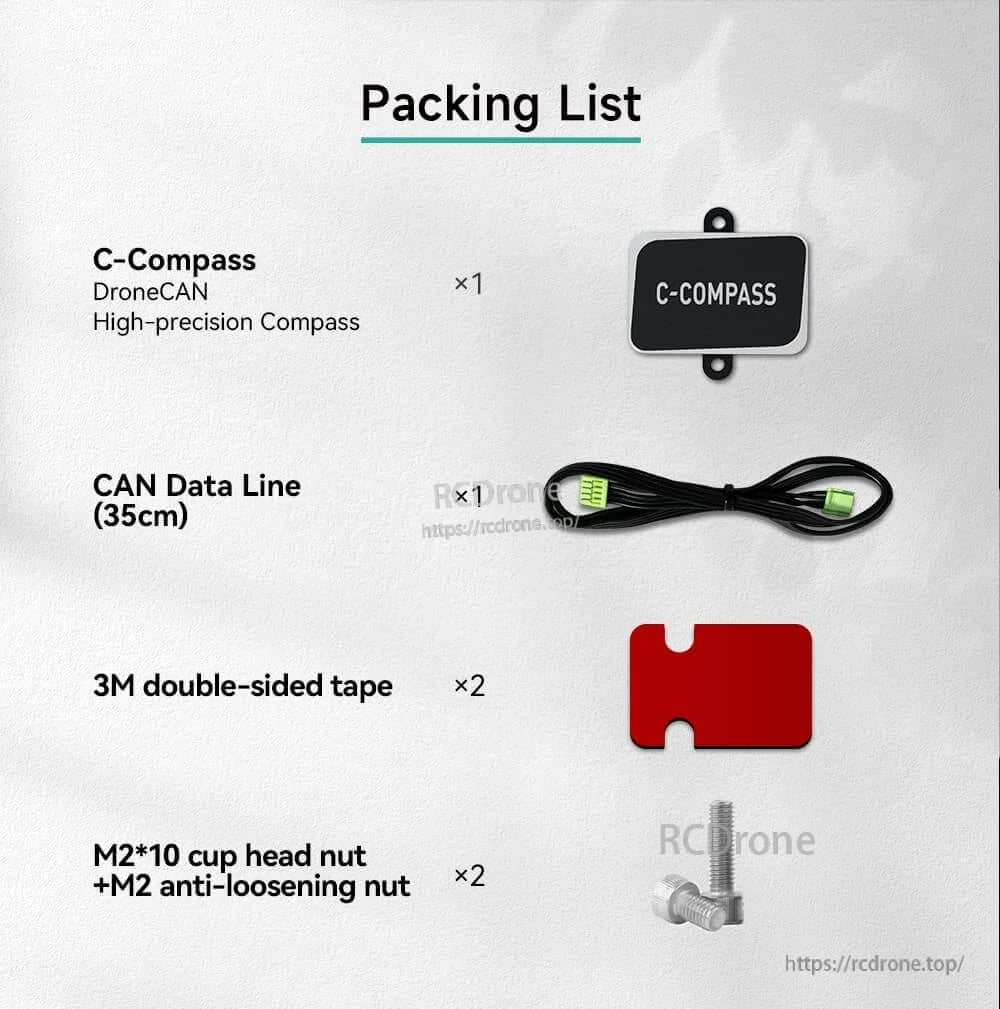
CUAV C-Compass adalah kompas luaran (magnetometer ketepatan tinggi) yang dibina di sekitar sensor magnet RM3100 untuk ekosistem pengawal Pixhawk dan PX4. Ia menggunakan komunikasi bas DroneCAN/UAVCAN dan serasi dengan platform ArduPilot dan PX4, dengan pemproses STM32F4 terbina dalam yang menjalankan seni bina perisian CUAV M4C untuk pengukuran arah yang stabil dalam rangka udara yang bising secara elektrik.
Ciri Utama
- Sensor magnet RM3100
- Pemproses STM32F4 terbina dalam
- Arsitektur perisian M4C yang dibangunkan sendiri oleh CUAV
- Serasi dengan platform perisian penerbangan APM/PX4
- Sokongan protokol DroneCAN/UAVCAN
- Direka untuk prestasi bunyi rendah dan anti-gangguan apabila digunakan sebagai kompas luaran
Spesifikasi
| MCU | STM32F412 (32 Bit Arm Cortex-M4, 100MHz, 512KB FLASH, 256KB RAM) |
| Sensor | RM3100 |
| Arsitektur Perisian | CUAV M4C |
| Protokol | DroneCAN/UAVCAN |
| Kadar Komunikasi | 2Mb |
| Kadar Segar | 80Hz |
| Bunyi | 15nT |
| Ketepatan | 0.25° (nilai berkesan) |
| Ketepatan Ulangan | 0.05° |
| Resolusi | 0.01° |
| Kepekaan | 13nT |
| Julat | -800 μT hingga +800 μT |
| Jenis Pengawal | PX4/ArduPilot (CUAV/Pixhawk dll.) |
| Antaramuka | GHR-04V-S |
| Voltan Operasi | 4.75-5.3V |
| Suasana Operasi | -20 hingga 80°C |
| Kelembapan Operasi | 5% hingga 95% (tanpa pemeluwapan) |
| Bahan Sarung | Aloi aluminium |
| Saiz | 31.5 x 31.0 x 14.0mm |
| Berat | 13g |
| Berat Tercatat | 0.5 kg |
| Dimensi Tercatat | 20 x 10 x 10 cm |
Pilihan
- C-Compass * 3 Pcs
- C-Compass & NEO 3 GPS / Set
- C-Compass & NEO 3 Pro GPS / Set
- C-Compass & NEO 3X GPS / Set
Aplikasi
- Kompas luaran/pengukuran arah untuk pembinaan autopilot Pixhawk dan CUAV yang menjalankan PX4 atau ArduPilot
- Meningkatkan kestabilan pengukuran magnet dengan memasang jauh dari sumber gangguan (kabel, bateri, motor)
Untuk pertanyaan mengenai integrasi dan kesesuaian (penyediaan DroneCAN/UAVCAN, parameter ArduPilot/PX4, pendawaian), hubungi [email protected] or lawati https://rcdrone.top/.
Related Collections