



Motor SteadyWin DD4015 24V RS485/CAN Pengekod Mutlak 14bit 0.25 N.M 125rpm 114g -20~80℃
Motor SteadyWin DD4015 24V RS485/CAN Pengekod Mutlak 14bit 0.25 N.M 125rpm 114g -20~80℃
SteadyWin
Harga biasa
$152.00 USD
Harga biasa
Harga jualan
$152.00 USD
Harga seunit
per
Taxes included.
Penghantaran dikira semasa pembayaran.
Tidak dapat memuatkan ketersediaan pengambilan
Overview
Motor SteadyWin DD4015 adalah motor kompak dengan komunikasi RS485 / CAN dan pengodok absolut satu putaran (14bit). Ia ditentukan untuk operasi nominal 24V (jangka 10~28V) dan sesuai untuk penggerak robotik di mana maklum balas kedudukan gelung tertutup diperlukan.
Ciri-ciri Utama
- Komunikasi: RS485 / CAN
- Pengodok: Absolut satu putaran, resolusi 14bit
- Tork nominal: 0.25 N.M; tork puncak: 0.35 N.m
- Kelajuan nominal: 125 rpm; kelajuan maksimum tanpa beban: 1013 rpm
Spesifikasi Teknikal
| Parameter | Nilai |
|---|---|
| Voltan nominal | 24V |
| Julat voltan | 10~28V |
| Arus nominal | 1.2A |
| Kuasa nominal | 28.8W |
| Tork nominal | 0.25N.M |
| Kelajuan nominal | 125rpm |
| Kelajuan maksimum tanpa beban | 1013 rpm |
| Tork puncak | 0.35 N.m |
| Arus puncak | 1.85A |
| Pemalar kelajuan | 42.21rpm/v |
| Pemalar tork | 0.17N.M/A |
| Bilangan pasangan kutub | 11Pasangan |
| Rintangan fasa | 12.57Ω |
| Induktans fasa | 2.48Mh |
| Komunikasi | RS485 / CAN |
| Jenis pengodok | Absolut satu putaran |
| Resolusi | 14bit |
| Berat motor | 114g |
| Suasana kerja | -20~80℃ |
Meja / Pemasangan (dari lukisan)
- Penandaan model: DD4015
- Diameter luar: Ø40 ±0.1
- Panjang keseluruhan: 33 ±0.1
- Panjang segmen: 12.4 dan 20.1
- Diameter aci: Ø5
- Corak sisi depan: Ø20; 4-M3 (kedalaman ▽3); Ø13.6 (+0.05/0) (kedalaman ▽2); Ø12.6 (+0.1/0) (kedalaman ▽12)
- Corak sisi belakang: Ø33; 4-M3 (kedalaman ▽4.5)
- Penghubung: SH1.0-8PIN
- SH1.0-8PIN isyarat: 485_A, 485_B, CAN_H, CAN_L, GND, GND, VCC, VCC
Senario Aplikasi
- Robot Humanoid
- Lengan Robot
- Exoskeleton
- Robot Quadruped
- Kenderaan AGV
- Robot ARU
Dokumen
Untuk bantuan pendawaian, integrasi, atau pesanan, hubungi [email protected] or lawati https://rcdrone.top/.
Butiran
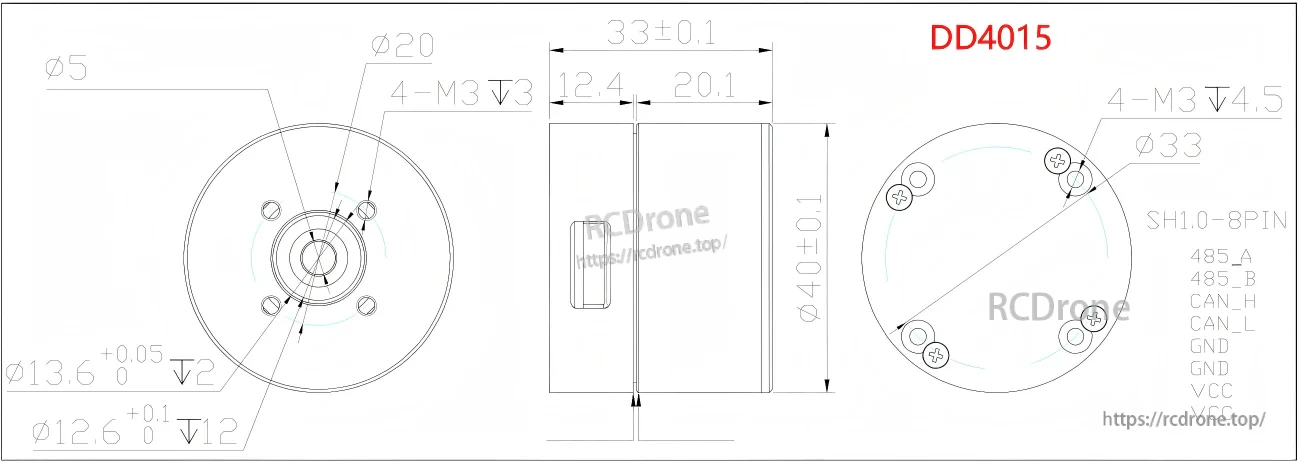
Dimensi mekanikal dan corak lubang pemasangan untuk DD4015, serta pinout penyambung 8-pin SH1.0 untuk pendawaian RS485 dan CAN.
Related Collections



