Dron Penyelidikan SU17 - Pembangunan Dron Industri Sumber Terbuka PX4 Dengan MID-360 LiDAR, Quad-Camera SLAM,EGO-Swarm
Dron Penyelidikan SU17 - Pembangunan Dron Industri Sumber Terbuka PX4 Dengan MID-360 LiDAR, Quad-Camera SLAM,EGO-Swarm
RCDrone
Tidak dapat memuatkan ketersediaan pengambilan
Gambaran keseluruhan
Drone Penyelidikan SU17 ialah quadcopter berprestasi tinggi yang menampilkan a Bateri 6000mAh, MID-360 LiDAR untuk pemetaan 3D, sistem SLAM empat kamera untuk penyetempatan yang tepat, dan bersepadu Kedudukan GPS+GLONASS. Dengan berat berlepas sebanyak 2.3 kg dan a kapasiti muatan 200 g, ia menawarkan 21 minit masa penerbangan dalam mod kedudukan visual. Dikuasakan oleh perisian Prometheus, ia menyokong pengecaman sasaran, perancangan laluan dan navigasi autonomi, menjadikannya gred industri penyelesaian untuk penyelidikan dan inovasi.
Parameter Perkakasan
kapal terbang
| Parameter | Penerangan |
|---|---|
| Jenis Pesawat | Quadcopter |
| Berat Berlepas (Anggaran) | 2.3 kg (dengan penutup pelindung dan bateri) |
| Jarak pepenjuru | 320 mm |
| Dimensi | Panjang: 442 mm, Lebar: 388 mm, Tinggi: 174 mm (tidak termasuk penutup pelindung) |
| Muatan Maksimum | 200 g |
| Masa Penerbangan Berlegar | lebih kurang 13 min (dengan tuding pada 100%, tidak di bawah 0%), kedudukan visual: 21 min |
| Ketepatan Melayang | GPS: Menegak ±1.5 m, Mendatar ±2.0 m |
| SLAM LiDAR 3D: Menegak ±0.08 m, Mendatar ±0.08 m | |
| SLAM visual 4-kamera: Menegak ±0.05 m, Mendatar ±0.05 m | |
| Tahap Rintangan Angin | Tahap 4 |
| Suhu Operasi | -10°C hingga 40°C |
| Cip MCU Utama | STM32H743 |
| IMU | ICM42688/BMI088 |
| Barometer | MS5611 |
| Kompas | QMC5883L |
| Antara muka | USB Jenis-C |
Komputer Onboard
| Parameter | Penerangan |
|---|---|
| Pemproses | Intel Core i5-8365U |
| Kapasiti Memori | 8GB |
| Kekerapan Memori | LPDDR3@2133MHz |
| Penyimpanan | 256GB NVMe SSD |
| Port Rangkaian | Baidu Apollo Ethernet X2, 12V@3A powebekalan r, menyokong IEEE 1588-2008 (PTP v2) |
| Pelabuhan Bersiri | Port Bersiri TTL X2, 5V/3.3V@500mA powebekalan r |
| USB | Jenis-C X2 (1x USB2.0, 1x USB3.0) |
| HDMI | HDMI 1.4 |
Bateri Kuasa
| Parameter | Penerangan |
|---|---|
| Model | SU17-L |
| Jenis Bateri | Bateri polimer litium tekanan tinggi |
| Voltan Ternilai | 26.4V (Maks), 21V (Min) |
| Voltan Simpanan | 22.8V (Lazim) |
| Kapasiti Dinilai | 6000mAh |
| Berat badan | 680 g |
| Dimensi | Panjang: 85.2 mm, Lebar: 86.5 mm, Tinggi: 135 mm |
Alat Kawalan Jauh
| Parameter | Penerangan |
|---|---|
| Model | QE-2 |
| Saluran | 8 |
| Kuasa Penghantaran | 18~20 dBm |
| Berat badan | 294.1 g |
Gimbal
| Parameter | Penerangan |
|---|---|
| Sudut Terkawal | -90° ~ 30° (Paksi Senget) |
| Protokol Penstriman | RTSP (Standard) |
| Format Pengekodan | H.264 |
| Resolusi | 1080P @ 25fps |
| FOV pepenjuru (D) | 120° |
| FOV Menegak (V) | 54° |
| FOV Mendatar (H) | 95° |
Penghantaran Imej
| Parameter | Penerangan |
|---|---|
| Kekerapan Operasi | 2.4GHz |
| Kuasa Penghantaran | 18dBm |
| Julat Komunikasi | 3Km (Tiada Gangguan, Tiada Halangan) |
| Julat Imej | 1Km (Gangguan Minimum, Tiada Halangan) |
| Lebar Jalur Maksimum | 40Mbps |
Kamera Kedalaman Quadruple
| Parameter | Penerangan |
|---|---|
| Pemecut Penglihatan | Intel Movidius Myriad X VPU |
| Resolusi Maksimum | 1296x816 |
| Kadar Bingkai Maksimum | 1280x800 @ 120fps |
| Jenis Pengatup | Pengatup Global |
| Format Pengekodan | Strim Tunggal 8/10-bit |
| FOV | 150° FOV Diagonal, 127.4° FOV Mendatar, 79.7° FOV Menegak |
| Bilangan Penderia | 4 (2 Depan + 2 Belakang) |
| IMU | BMI270 |
GNSS
| Parameter | Penerangan |
|---|---|
| Ketepatan Mendatar | 1.5 m CEP (dengan SBAS) |
| Ketepatan Halaju | 0.05 m/s |
| Mod Pengendalian | GPS + GLONASS + BDS + GALILEO + SBAS + QZSS |
Pengecas
| Parameter | Penerangan |
|---|---|
| Model | LK150-2640500 |
| Voltan Masukan AC | 100V ~ 240V |
| Voltan Masukan DC | 26.4V |
| Berat badan | 460 g |
| Mengecas Arus | 5A |
LiDAR 3D
| Parameter | Penerangan |
|---|---|
| Model | MID-360 |
| Panjang Gelombang Laser | 905 nm |
| Julat Pengukuran | 40 m @ 10% Pemantulan |
| FOV | Mendatar 360°, Menegak -7° ~ 52° |
| Julat Minimum | 0.1 m |
| Kekerapan Titik | 10 Hz (Lazim) |
| Keluaran Mata | 200,000 mata/s |
| Antaramuka Data | 100 BASE-TX Ethernet |
| Penyegerakan Data | IEEE 1588-2008 (PTP v2), GPS |
| IMU terbina dalam | ICM40609 |
| Voltan Bekalan Kuasa | 7~27V |
| Dimensi | 65 mm (W) x 65 mm (D) x 60 mm (H) |
| Berat badan | 115 g |
| Suhu Operasi | -20°C ~ 55°C |
Parameter Perisian
Komputer Onboard
| Parameter | Penerangan |
|---|---|
| Model | Intel Core i5-8365U |
| Sistem | Ubuntu 20.04 |
| Nama pengguna | amov |
| Kata laluan | amov |
| ROS | noetik |
| OpenCV | 4.7.0 |
| Sistem Kedudukan Visual | BSA_SLAM V1 |
Perisian Prometheus
| Parameter | Penerangan |
|---|---|
| Versi | v2.0 |
| Sistem PrometheusGroundStation | v1.24.11.27 (Versi akhir berdasarkan rekod keluaran Wiki) |
Butiran
SU17 Edisi Penyelidikan
Drone penyelidikan kualiti gred industri
- LiDAR 3D pilihan: Membolehkan pemetaan, kedudukan dan pengelakan halangan navigasi.
- Perisian Dron Autonomi Prometheus: Kaya dengan demo untuk penguasaan pantas kawalan dron.
- Platform penerbangan gred industri: Stabil dan terbuka, menetapkan standard baharu untuk prestasi dron penyelidikan.

Ciri-ciri Utama
Penyelidikan SU17 Platform Pembangunan Drone (dirujuk sebagai SU17) mengguna pakai reka bentuk bersepadu, menggabungkan pengawal penerbangan, komputer atas kapal, modul SLAM empat kamera, kamera awan dan modul penghantaran imej untuk penyepaduan peringkat tinggi, meningkatkan kestabilan dan kebolehpercayaan perkakasan dengan ketara. Dilengkapi dengan perisian dron autonomi Prometheus, SU17 menyokong ciri seperti pengecaman sasaran, penjejakan dan perancangan laluan untuk pelbagai senario kawalan penerbangan.
Ia secara pilihan menyepadukan MID-360 3D LiDAR, digabungkan dengan algoritma FAST-LIO untuk mencapai 3D LiDAR SLAM, menawarkan maklumat penderiaan dan kedudukan persekitaran yang tepat. Dipasangkan dengan algoritma perancangan laluan EGO-Swarm, ia membolehkan pemetaan 3D masa nyata yang cekap dan mengelakkan halangan dalam persekitaran yang kompleks.




Sistem Perisian Prometheus V2
Platform pembangunan dibina di atas rangka kerja sumber terbuka ROS dan Prometheus, menawarkan fungsi yang kaya dan API pembangunan sekunder yang meluas untuk pengaturcaraan semula yang cekap. Ia menyediakan akses kepada maklumat kedudukan, mod penerbangan, status bateri, data IMU, dan antara muka data keadaan dan penderia dron lain, bersama-sama antara muka kawalan untuk kedudukan, halaju, pecutan dan sikap.
Selain itu, ia termasuk contoh penggunaan untuk API berkaitan. Tambahan pula, dron itu menampilkan fungsi pemeriksaan keselamatan untuk operasi penerbangan (anti-crash), membolehkan penurunan automatik dalam keadaan tidak normal, mengurangkan risiko kemalangan dan memastikan proses pembangunan yang lebih selamat.

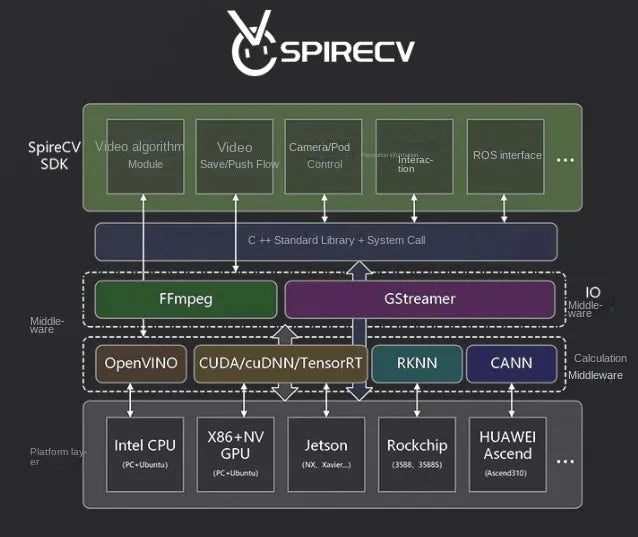
Perpustakaan Visi SpireCV
SpireCV Vision Library ialah SDK pemprosesan imej masa nyata yang direka khusus untuk sistem UAV pintar. Ia menyediakan fungsi seperti gimbal dan kawalan kamera, penyimpanan dan penstriman video, pengesanan sasaran, pengecaman dan penjejakan.
SDK ini bertujuan untuk menawarkan prestasi tinggi, kebolehpercayaan dan antara muka yang diperkemas untuk pembangun sistem UAV pintar. Dengan penyelesaian pemprosesan visual yang kaya dengan ciri, ia membolehkan pembangun melaksanakan pelbagai aplikasi berasaskan penglihatan yang kompleks dengan cekap.
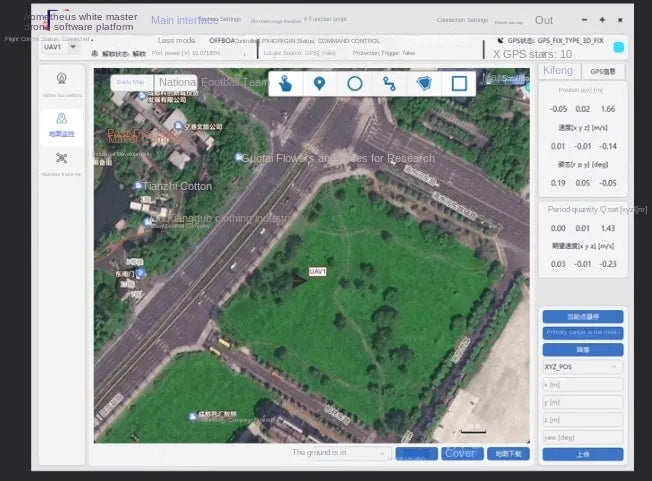
Stesen Tanah Prometheus
Stesen Ground Prometheus ialah antara muka interaksi manusia-drone yang dibangunkan berdasarkan sistem Prometheus, dibina menggunakan teknologi Qt. Ia membolehkan replikasi pantas fungsi sistem Prometheus, menyediakan pemantauan masa nyata dan visualisasi 3D status dron dan data kawalan.
Melalui stesen bumi, pengguna boleh melaksanakan arahan seperti berlepas satu klik, tuding pada kedudukan semasa, pendaratan, dan kawalan kedudukan. Selain itu, sistem menyokong butang fungsi tersuai untuk memulakan skrip yang ditentukan pengguna atau menghantar mesej tersuai, dengan ketara meningkatkan kemudahan, kecekapan dan kebolehskalaan operasi pengguna.
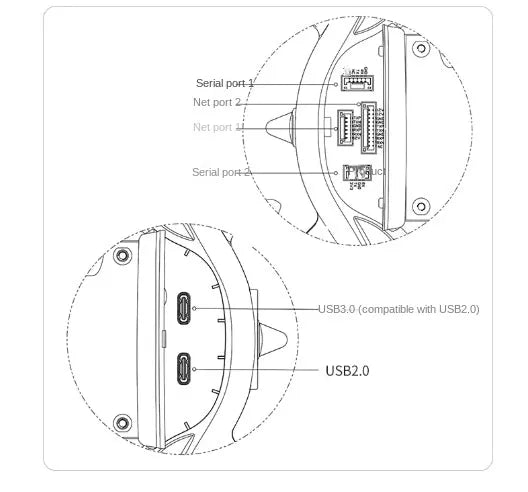
Pengembangan Berkuasa
Pelabuhan Pengembangan Perkakasan
-
Port Bersiri 1
-
Port Bersiri 2
-
Port Rangkaian 1
-
Port Rangkaian 2
-
Port USB:
- USB 3.0 (Serasi dengan USB 2.0)
- USB 2.0
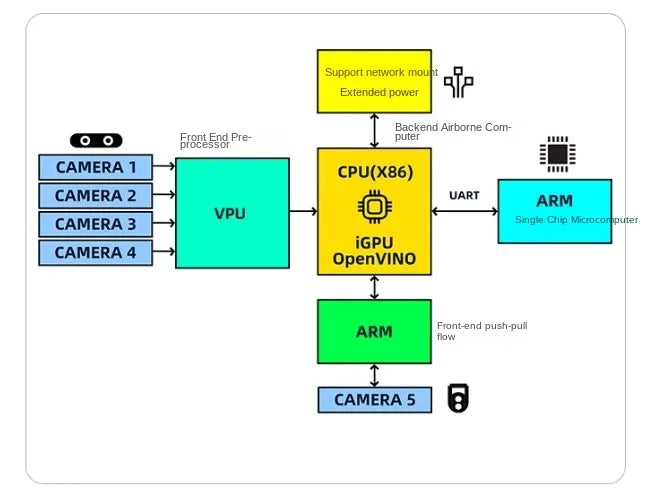
Rangka Kerja Perkakasan
Imej itu menggambarkan seni bina perkakasan dron SU17, menyerlahkan penyepaduan pelbagai komponen untuk pemprosesan data lanjutan dan kawalan sistem:
-
Kamera (Kamera 1-4):
Disambungkan kepada a VPU (Unit Pemprosesan Penglihatan) untuk prapemprosesan bahagian hadapan. -
VPU:
Mengendalikan data visual daripada berbilang kamera dan memajukannya ke unit pemprosesan. -
CPU (X86) dengan iGPU dan OpenVINO:
Berkhidmat sebagai unit pengiraan utama untuk pemprosesan bahagian belakang, menyokong keupayaan pengembangan berkaitan rangkaian untuk kuasa pengiraan yang dipertingkatkan. -
Pengawal Mikro Cip Tunggal ARM:
Berinteraksi dengan CPU melalui antara muka UART untuk fungsi kawalan tambahan. -
Saluran Paip Bahagian Hadapan dan Kamera 5:
Diuruskan oleh pemproses ARM khusus untuk penyelarasan data selanjutnya.
Rangka kerja ini menyepadukan berbilang unit pemprosesan, menyokong analisis imej masa nyata, tugas pengiraan lanjutan dan komunikasi lancar antara komponen perkakasan. Ia memastikan pengendalian yang cekap bagi operasi kompleks dalam aplikasi penyelidikan dan pembangunan.
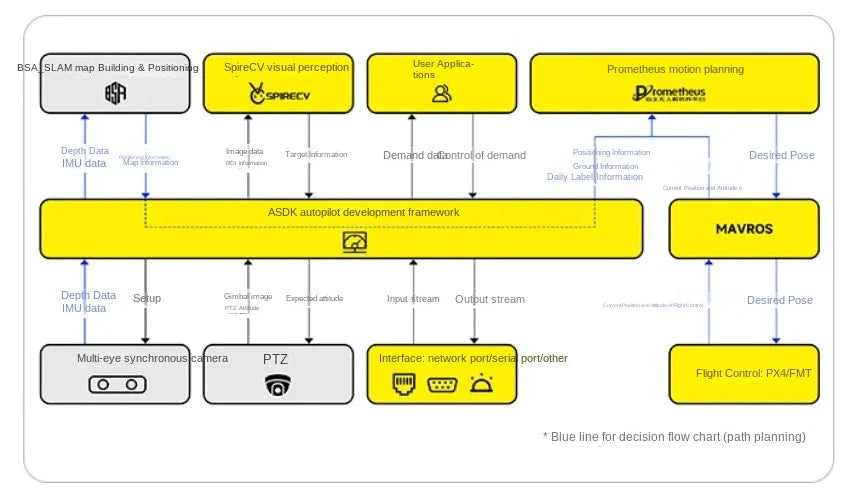
Rangka Kerja Perisian
Gambar rajah menggambarkan seni bina perisian dron SU17, menyerlahkan penyepaduan pelbagai sistem untuk kefungsian autonomi:
-
BSA_SLAM (Pemetaan dan Penyetempatan):
- Menyediakan data pemetaan spatial dan kedudukan.
- Mengintegrasikan input sensor kedalaman dan IMU untuk persepsi persekitaran yang tepat.
-
Persepsi Penglihatan SpireCV:
- Memproses data visual, termasuk pengesanan objek, maklumat ROI dan penjejakan sasaran.
-
Aplikasi Pengguna:
- Antara muka untuk tugasan dipacu pengguna seperti visualisasi data dan input arahan.
-
Perancangan Pergerakan Prometheus:
- Mengendalikan perancangan trajektori menggunakan data kedudukan, halaju dan sasaran.
-
Rangka Kerja Pemanduan Autonomi ASDK:
- Berfungsi sebagai lapisan pemprosesan pusat, mengurus aliran data antara penderia, kamera, modul awan dan antara muka luaran.
- Menyokong berbilang saluran input/output (cth, port rangkaian, port bersiri).
-
MAVROS:
- Berkomunikasi dengan sistem kawalan penerbangan (PX4/FMT) untuk kawalan keadaan penerbangan dan kedudukan.
-
Modul Awan dan Kamera Berbilang Penyegerakan:
- Mengintegrasikan data berasaskan awan untuk pemprosesan lanjutan.
- Menyegerakkan input visual untuk operasi berketepatan tinggi.
Garis Biru: Mewakili laluan membuat keputusan untuk perancangan trajektori.
Seni bina ini menunjukkan reka bentuk modular, boleh diperluas, membolehkan komunikasi lancar antara pelbagai komponen perkakasan dan perisian untuk operasi dron yang mantap.
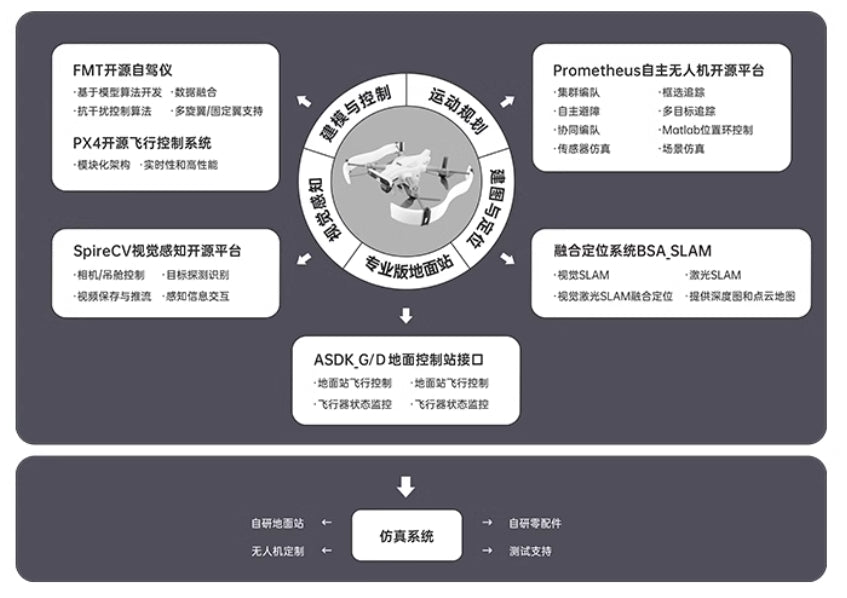
Keterbukaan Pintar: Penyelesaian Sistem UAV Bersepadu
Gambar rajah membentangkan seni bina yang komprehensif dan terbuka untuk sistem dron, menekankan modulariti dan integrasi merentasi pelbagai komponen:
-
Komponen Teras:
- Autopilot Sumber Terbuka FMT: Menyediakan kawalan penerbangan yang boleh dipercayai berdasarkan pembangunan modular, menyokong persekitaran yang pelbagai dan integrasi data.
- Sistem Kawalan Penerbangan PX4: Memastikan kestabilan dan menyokong penyesuaian modular lanjutan.
- Platform Persepsi Penglihatan SpireCV: Fokus pada pemprosesan imej, termasuk pengesanan objek, penjejakan dan penstriman video masa nyata.
-
Rangka Kerja Utama:
- Platform UAV Autonomi Prometheus: Termasuk kawalan berbilang dron, perancangan gerakan, navigasi kolaboratif dan simulasi dunia sebenar.
- Sistem BSA_SLAM: Menggabungkan SLAM berasaskan penglihatan dan SLAM berasaskan LiDAR untuk kedudukan dan pemetaan yang tepat.
- Antara Muka Kawalan Stesen Tanah ASDK G/D: Membolehkan komunikasi lancar antara stesen bumi dan UAV untuk pemantauan dan pelarasan masa nyata.
-
Penyepaduan Aliran Kerja:
- Serlahkan proses seperti perancangan gerakan, pemetaan persekitaran dan navigasi autonomi.
- Penyepaduan dengan stesen tanah profesional untuk kawalan trajektori, pengelakan halangan dan pengurusan data masa nyata.
-
Sokongan Simulasi:
- Termasuk sistem simulasi untuk ujian misi autonomi, kawalan UAV dan pengesahan komponen.
Sistem ini menunjukkan penyelesaian canggih untuk pembangunan UAV autonomi, dengan keupayaan berskala untuk penyelidikan, aplikasi dan ujian dalam pelbagai senario.
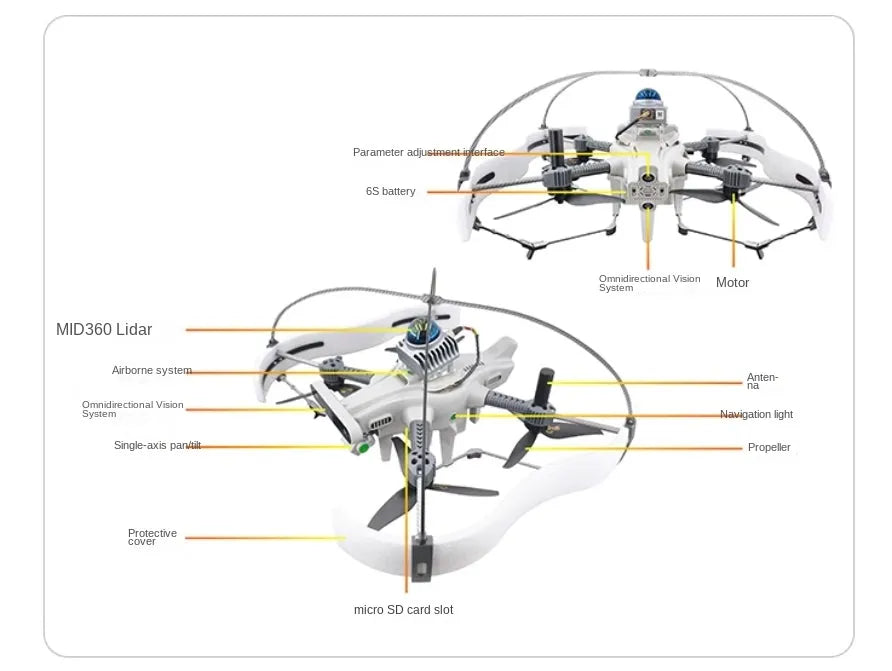
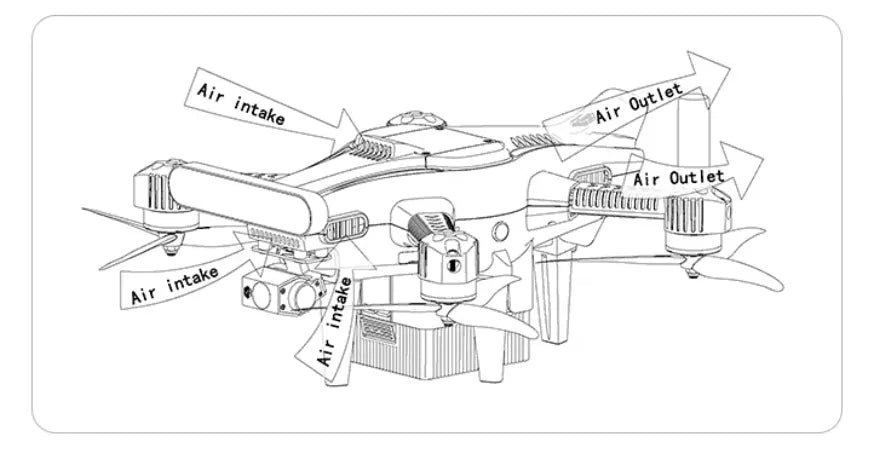
komponen struktur dron penyelidikan SU17, menekankan kestabilan dan reka bentuk lanjutannya. Ciri-ciri utama termasuk MID360 LiDAR untuk pemetaan yang tepat, an sistem penglihatan omnidirectional untuk persepsi alam sekitar yang menyeluruh, a gimbal paksi tunggal untuk pengimejan yang stabil, dan yang teguh Bateri 6S untuk kuasa lanjutan. Komponen penting lain termasuk sistem kipas, antena, lampu navigasi, dan a slot kad mikro SD untuk penyimpanan data. Reka bentuk menyepadukan perkakasan canggih, memastikan kebolehpercayaan dan prestasi tinggi untuk pelbagai aplikasi penyelidikan.
Related Collections