








WitMotion HWT601-AGV-485 IMU RS485 Modbus, IP67, 200 Hz – 6-Paksi Akselerometer Giroskop Inklinometer, ROS/Matlab
WitMotion HWT601-AGV-485 IMU RS485 Modbus, IP67, 200 Hz – 6-Paksi Akselerometer Giroskop Inklinometer, ROS/Matlab
WitMotion
Tidak dapat memuatkan ketersediaan pengambilan
Overview
Sensor WitMotion HWT601-AGV-485 adalah sensor sikap/arah 6-paksi yang direka untuk robot AGV, dron dan platform autonomi. Ia menggabungkan 3-paksi pecutan + 3-paksi kelajuan sudut dan mengeluarkan 3-paksi sudut & quaternion melalui RS485 (Modbus) pada kadar sehingga 200 Hz. Modul ini mempunyai penapisan dinamik Kalman, kalibrasi turntable ketepatan tinggi, perolehan bias automatik/manual, kuasa sandaran untuk menyimpan arah semasa mati kuasa, dan sebuah IP67 perumahan kalis air/kalis habuk. Ia juga menyokong pengk cascading pelbagai tahap (sehingga 32 unit) untuk pengukuran sikap yang diselaraskan.
Ciri Utama
-
Sudut ketepatan tinggi: Ketepatan XY 0.1°; Ketepatan Z 0.1° (HWT601-AGV-485) / 0.15° (WT601-AGV-485).
-
Bias giroskop stabil: XY 5°/j; Z 2°/j (HWT601-AGV-485) / 5°/j (WT601-AGV-485).
-
Input lebar 9–36 V, arus operasi ≈ 8 mA @12 V.
-
RS485 Modbus, baud 4,800–230,400 bps.
-
Pengambilan sampel: bacaan permintaan–jawapan sehingga 200 Hz.
-
Algoritma: penggabungan penapis Kalman dan algoritma arah AGV khusus.
-
Perisian: suite PC percuma dengan papan pemuka langsung, plot lengkung, visualisasi 3D (kereta/sfera/kiub/pesawat), konfigurasi (bias, rujukan sudut, kalibrasi pecutan, faktor skala), pencatatan data & penyimpanan langsung, dan import Matlab.
-
Mesra pemaju: contoh program dan sokongan kod untuk ROS, Linux, C/C#, Python.
-
Persekitaran: IP67, -40~80 °C (varian meja -40~85 °C ditunjukkan).
-
Berperingkat: sehingga 32 sensor pada RS485 untuk pengukuran sikap serentak.
Garisan Panduan Pemasangan
-
Pasang sensor pada permukaan yang ketat, rata, dan stabil; asas yang tidak rata menyebabkan ralat sudut (lihat FIG.1–2).
-
Pastikan paksi sensor selari dengan paksi yang diukur; elakkan sudut antara paksi (lihat FIG.3–4).
-
Model ini hanya menyokong pemasangan mendatar.
Perisian &dan Visualisasi
-
Papan Pemuka Data yang Berkuasa (sudut, kadar, pecutan, magnitud, kuaternion, port, suhu, voltan, dll.).
-
Papan konfigurasi: kadar baud, alamat peranti, pengambilan bias automatik, tetapan semula paksi-Z, kalibrasi pecutan, rujukan sudut, kalibrasi positif/negatif manual dan faktor skala.
-
Model 3D untuk pemantauan gerakan intuitif dan kurva masa nyata dengan kemas kini dinamik.
-
Pandangan data mentah dan penyimpanan fail untuk pengumpulan yang mudah; import analisis Matlab disokong.
-
Demo ROS IMU INS: visualisasi penjejakan sikap dan paparan data sikap (yaw/roll/pitch, kelajuan sudut, pecutan linear).
Spesifikasi
Antaramuka &dan Prestasi
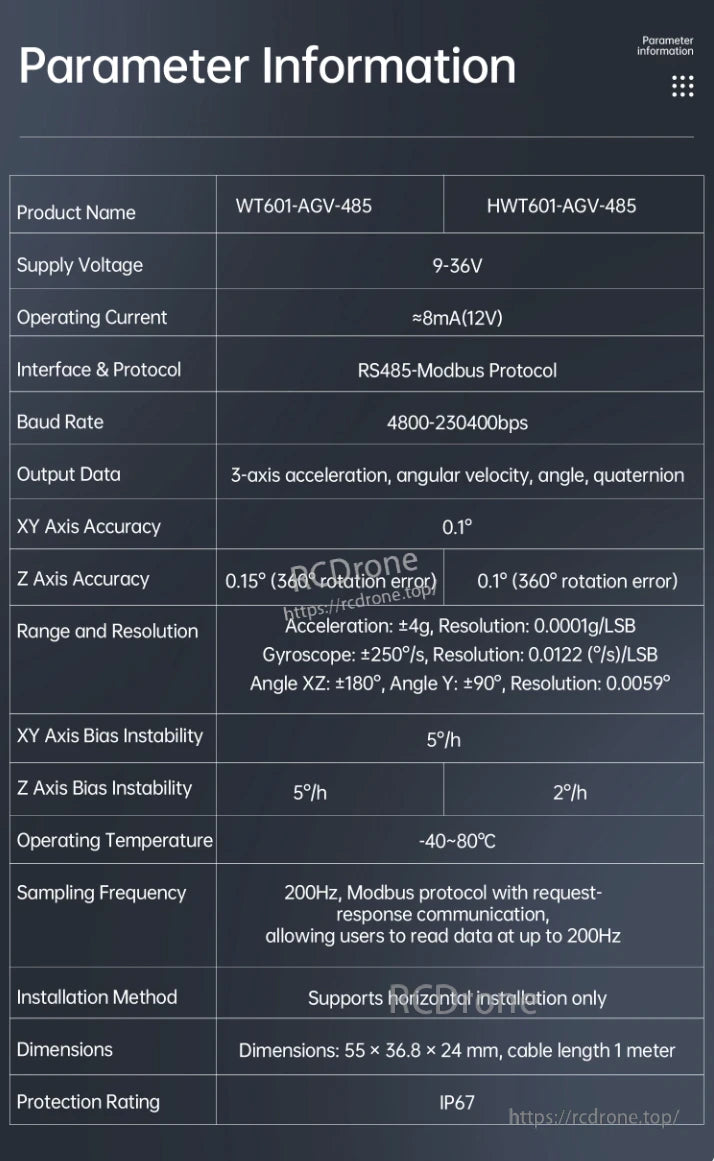
| Item | HWT601-AGV-485 | WT601-AGV-485 |
|---|---|---|
| Antaramuka / Protokol | RS485 / Modbus | RS485 / Modbus |
| Kadar baud | 4,800–230,400 bps | 4,800–230,400 bps |
| Data output | 3-paksi pecutan, kelajuan sudut, anjakan, quaternion | Sama |
| Frekuesi pengambilan sampel | Sehingga 200 Hz (permintaan–jawapan) | Sehingga 200 Hz |
| Ketepatan sudut XY | 0.1° | 0.1° |
| Ketepatan sudut Z (ralat putaran 360°) | 0.1° | 0.15° |
| Julat / resolusi Accel | ±4 g / 0.0001 g/LSB | Sama |
| Julat / resolusi Gyro | ±250 °/s / 0.0122 (°/s)/LSB | Sama |
| Julat / resolusi sudut | XZ: ±180°; Y: ±90° / 0.0059° | Sama |
| Ketidakstabilan bias Gyro (XY / Z) | 5°/j / 2°/j | 5°/j / 5°/j |
| Koefisien suhu (XYZ) | 0.002°/°C | 0.002°/°C |
Elektrik, Mekanikal &dan Persekitaran
-
Voltan bekalan: 9–36 V; Arus operasi: ≈ 8 mA (12 V)
-
Dimensi: 55 × 36.8 × 24 mm; Panjang kabel: 1 m
-
Perlindungan: IP67
-
Suasana operasi: -40~80 °C (varian meja juga menunjukkan -40~85 °C)
-
Pemasangan: Hanya pemasangan mendatar
-
Pengk cascading: Sehingga 32 unit pada RS485
Bidang Aplikasi
AGV/AMR dan robot mudah alih, dron/UAV, kenderaan logistik tanpa pemandu, dan modul persepsi pemanduan autonomi.
Penamaan Model &dan Pemilihan
-
HWT601-AGV-485 – ketepatan paksi-Z yang lebih tinggi (0.1°) dan ketidakstabilan bias-Z yang lebih rendah (2°/h).
-
WT601-AGV-485 – spesifikasi standard paksi-Z (0.15°, 5°/h).
Pilih HWT601 apabila ketepatan Z-heading adalah kritikal.
Butiran

Sensor sikap 6-paksi berketepatan tinggi dengan 3-paksi pecutan, kelajuan sudut, sudut, dan kuaternion. Menampilkan algoritma heading AGV, perlindungan IP67, penapisan Kalman, pengambilan bias automatik, dan sokongan perisian PC.
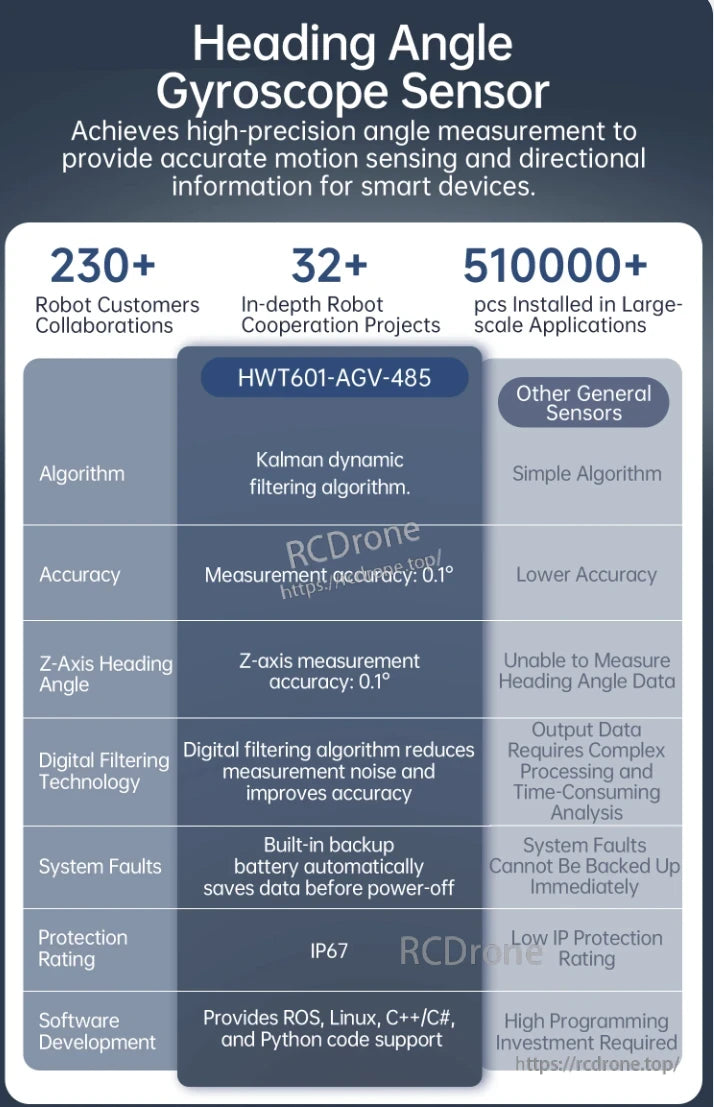
Sensor Giroskop Sudut Heading HWT601-AGV-485 menawarkan pengukuran sudut berketepatan tinggi dengan penapisan Kalman, ketepatan 0.1°, pengurangan bunyi digital, perlindungan IP67, dan menyokong ROS, Linux, C++, dan Python. Lebih 230 kolaborasi robot dan 510,000+ pemasangan.
HWT601-AGV-485 IMU menawarkan bekalan 9-36V, RS485-Modbus, pengambilan 200Hz, pecutan ±4g, giroskop ±250°/s, penarafan IP67, operasi -40~80°C. Menyediakan data 3-paksi yang tepat dan beresolusi tinggi.
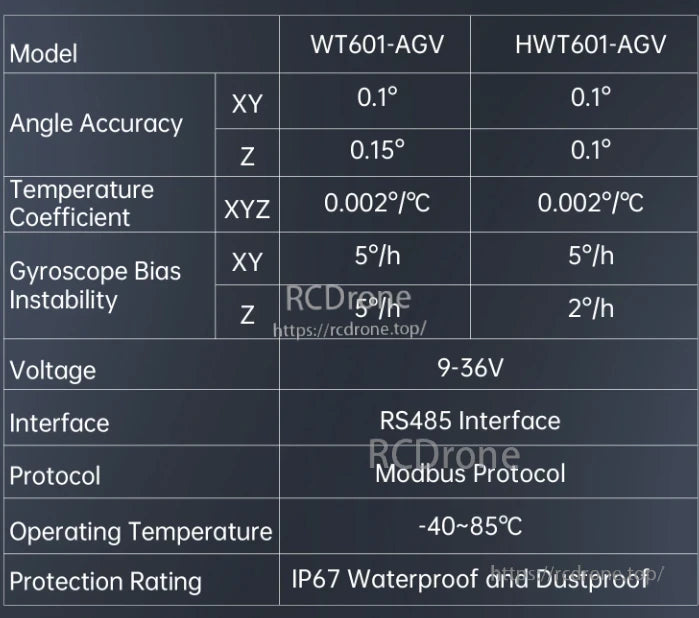
HWT601-AGV IMU menawarkan ketepatan sudut 0.1° pada paksi XY dan Z dengan pekali suhu 0.002°/°C merentasi XYZ. Ketidakstabilan bias giroskop adalah 5°/j (XY) dan 2°/j (Z). Ia beroperasi pada 9–36V, menggunakan RS485 dengan Modbus, dan berfungsi dari -40 hingga 85°C. Dengan penarafan IP67, ia memberikan perlindungan kalis air dan debu. Varian WT601-AGV mempunyai spesifikasi yang serupa tetapi ketepatan paksi Z 0.15° dan ketidakstabilan bias paksi Z 5°/j. Kedua-dua model memastikan prestasi yang boleh dipercayai dalam persekitaran yang mencabar.
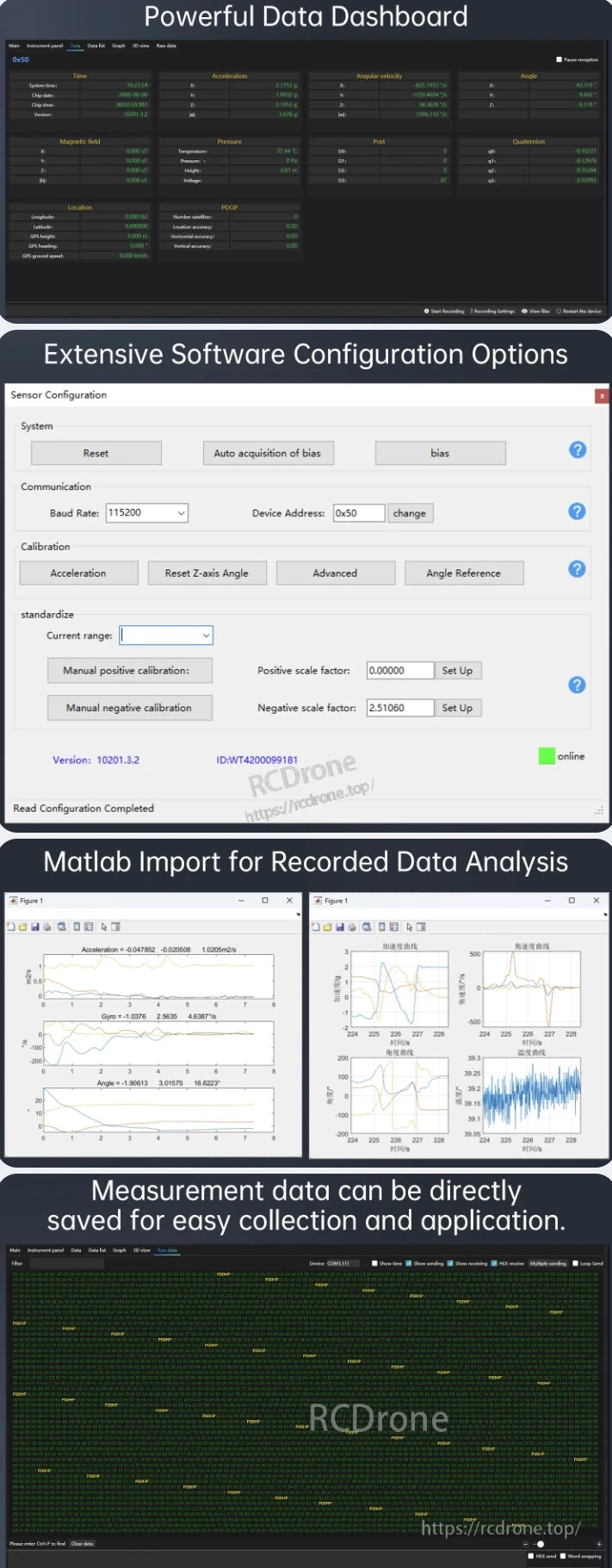
Papan pemuka data yang kuat dengan bacaan sensor masa nyata, konfigurasi perisian yang luas, import MATLAB untuk analisis, dan penyimpanan data secara langsung untuk pengumpulan dan aplikasi yang mudah.
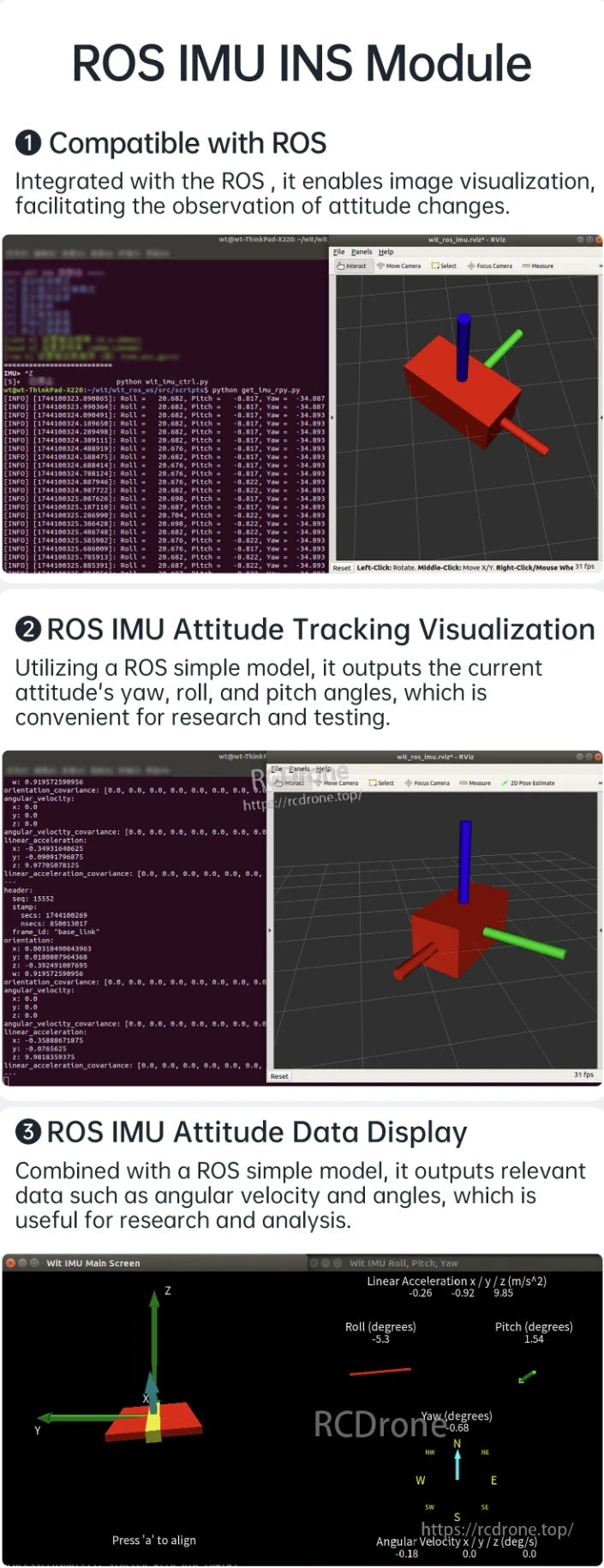
Modul ROS IMU INS menawarkan keserasian ROS, memvisualisasikan penjejakan sikap, dan memaparkan roll, pitch, yaw, kelajuan sudut, dan pecutan linear secara masa nyata untuk penyelidikan dan analisis.
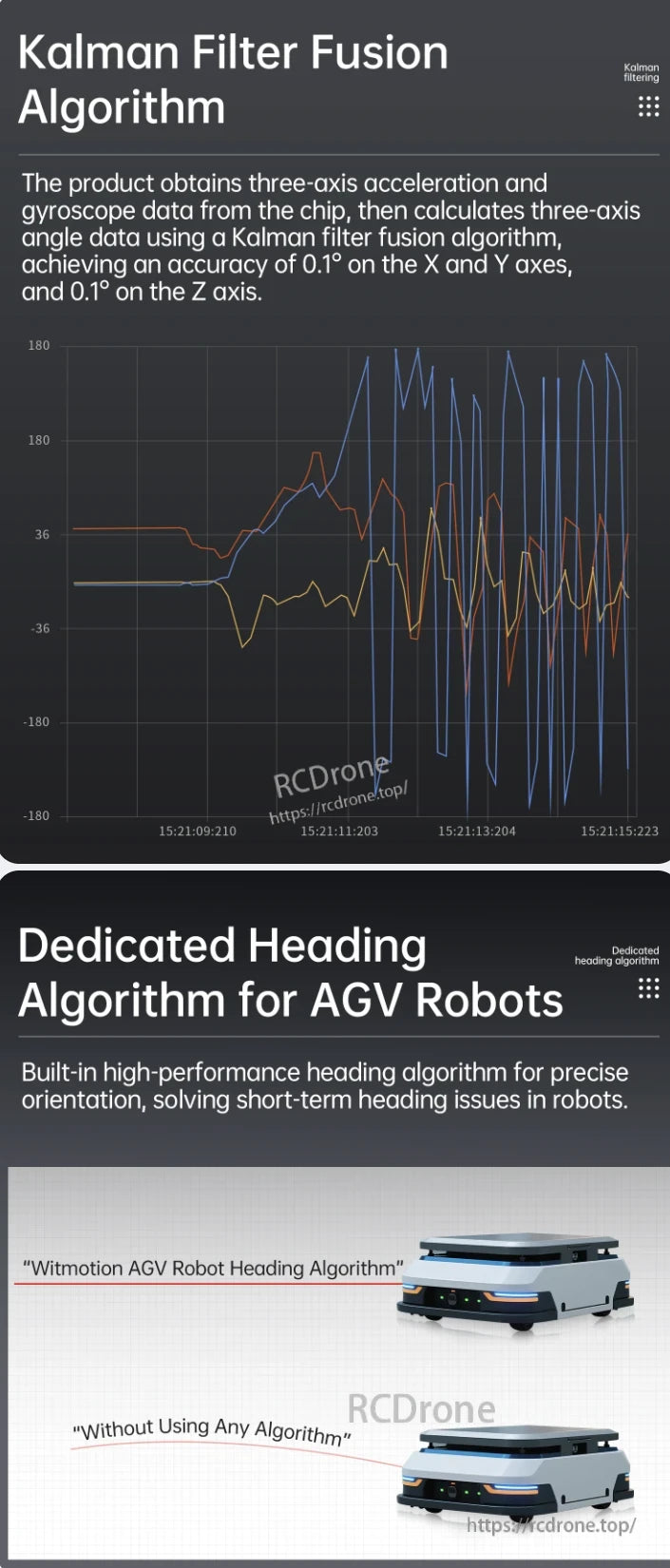
WitMotion HWT601 AGV IMU memberikan data sudut 3-paksi yang tepat dengan ketepatan 0.1° menggunakan penggabungan penapis Kalman. Algoritma heading khususnya memastikan orientasi robot yang stabil, secara signifikan meningkatkan prestasi berbanding sistem tanpa algoritma tersebut.
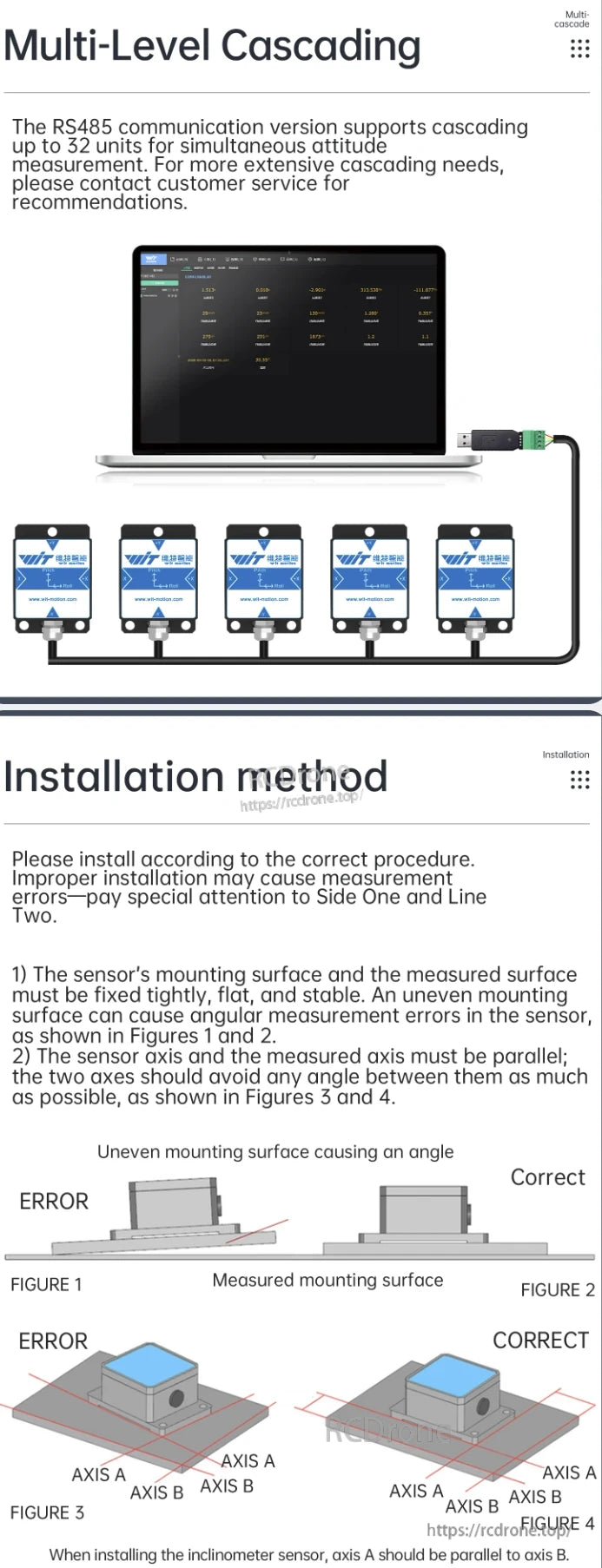
WitMotion HWT601 AGV IMU menyokong sehingga 32 unit berturutan melalui RS485 untuk pengukuran sikap. Pastikan pemasangan yang rata, stabil dan paksi yang selari untuk ketepatan.
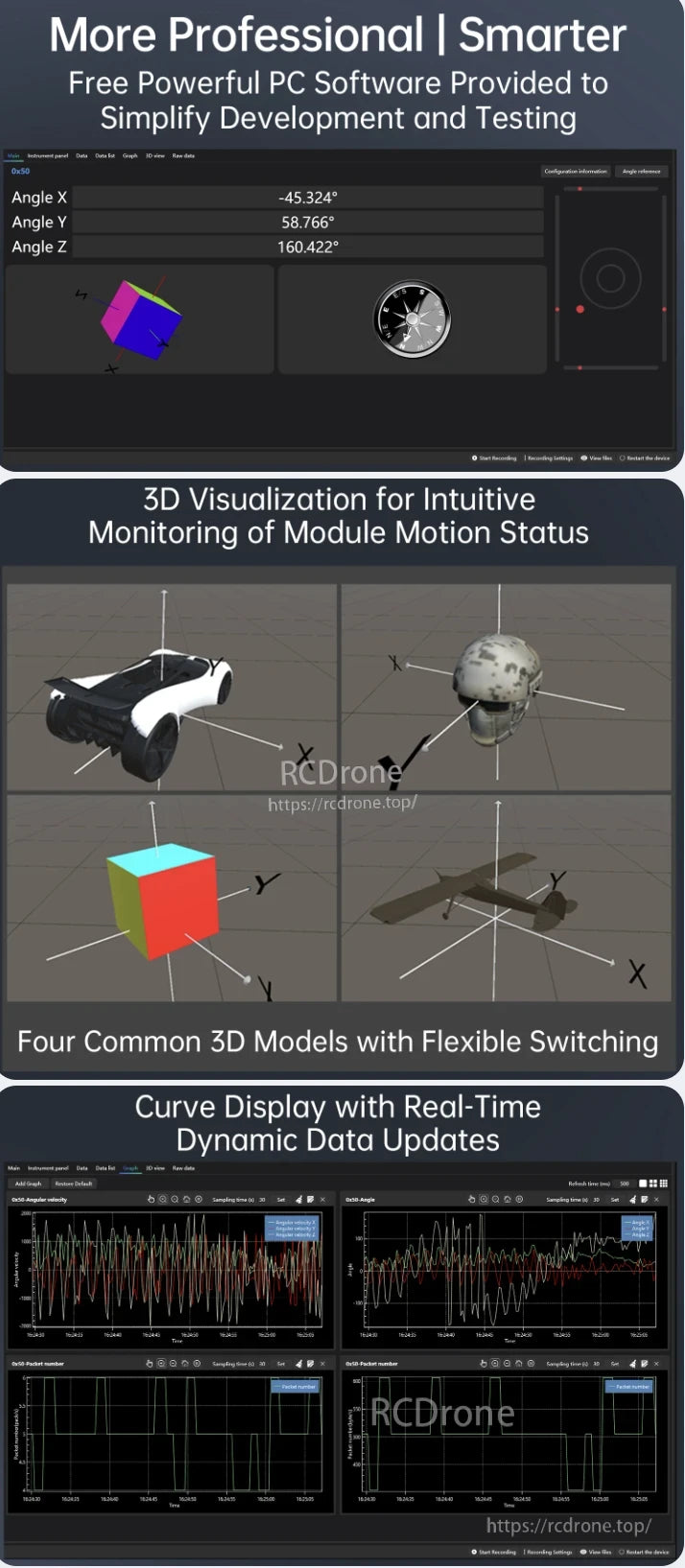
Perisian PC profesional untuk WitMotion HWT601 AGV IMU menawarkan visualisasi 3D masa nyata, pemantauan sudut, dan paparan lengkung dinamik.Ciri-ciri termasuk penjejakan gerakan intuitif, penukaran model yang fleksibel, dan kemas kini data secara langsung untuk pembangunan dan pengujian yang efisien.
Dokumentasi sokongan termasuk program contoh untuk STM32, Arduino, 51 UART, Windows C++, dan Matlab untuk membantu pemaju menggunakan produk dengan tutorial dan contoh kod.
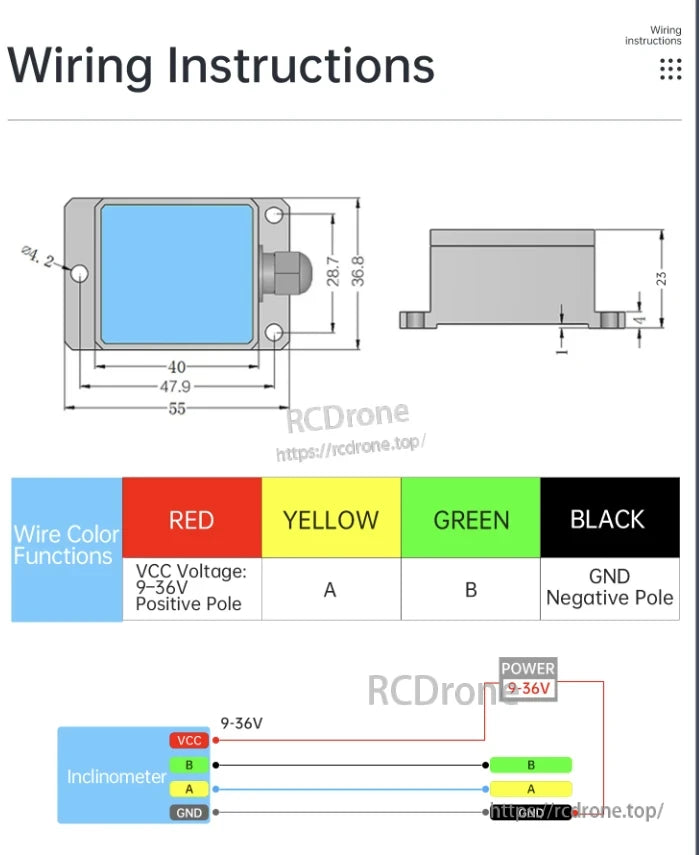
Panduan pendawaian WitMotion HWT601 AGV IMU: merah (9-36V), kuning (A), hijau (B), hitam (GND). Dimensi dan diagram sambungan disediakan.

WitMotion HWT601 AGV IMU untuk dron, pemanduan autonomi, robot mudah alih, dan kenderaan logistik tanpa pemandu.
Related Collections








