WitMotion WT1-IMU Sensor Sudut Dua Paksi (Pecutan + Inklinometer), 3.3–5V TTL, Ketepatan 0.5°, Output 20 Hz
WitMotion WT1-IMU Sensor Sudut Dua Paksi (Pecutan + Inklinometer), 3.3–5V TTL, Ketepatan 0.5°, Output 20 Hz
WitMotion
Tidak dapat memuatkan ketersediaan pengambilan
Overview
WitMotion WT1-IMU adalah sensor sudut dua paksi yang sangat berpatutan yang menggabungkan data akselerometer/giroskop/magnetometer dengan algoritma berasaskan penapis Kalman untuk mengeluarkan sudut X/Y secara masa nyata. Modul ini beroperasi dari 3.3–5 V, berkomunikasi melalui TTL serial, dan dibina pada PCB lubang cap yang dilapisi emas yang padat untuk integrasi SMT yang mudah. Ketepatan sudut tipikal adalah ±0.5° (X & Y) dengan kadar pulangan lalai 20 Hz. Perisian PC rasmi menyediakan papan pemuka, kalibrasi, log, dan eksport; SDK/contoh menyokong MATLAB, Python, Raspberry Pi, STM32, ROS, Arduino, dan C/C#.
Fungsi Utama
-
Output sudut dua paksi (X, Y) untuk pengukuran sikap/tilt
-
Penapis Kalman + algoritma penggabungan WitMotion untuk kestabilan tinggi
-
Bekalan: 3.3–5 V, TTL UART; LDO terbenam
-
Ketepatan: ±0.5° (X & Y)
-
Julat sudut: X ±180°, Y ±90°
-
Kadar pulangan lalai: 20 Hz (boleh dikonfigurasi dalam perisian)
-
Penggunaan semasa: tipikal ~5 mA, <10 mA
-
Kompaun 15.24 × 15.24 mm modul; lubang cap bersalut emas
-
Perisian PC percuma: papan pemuka, kalibrasi, tetapan lebar jalur/baud, rakaman data & main semula, eksport ke TXT/BIN/PLAY/XLS
-
Aksesori/perkakasan: penyesuai USB-ke-TTL pilihan dan fixture pembakaran ujian untuk memudahkan penyediaan
Spesifikasi
| Item | Nilai |
|---|---|
| Model | WT1-IMU |
| Voltan | 3.3–5 V |
| Antara Muka | TTL UART |
| Kandungan output | Sudut 2-paksi (X, Y) |
| Julat sudut | X: ±180°;Y: ±90° |
| Ketepatan sudut | X/Y: ±0.5° |
| Kadar pulangan lalai | 20 Hz |
| Kadar Baud | 9600 (output 20 Hz secara lalai) |
| Arus | typ. 5 mA; <10 mA |
Dimensi & Paksi
| Saiz (mm) | Nilai |
|---|---|
| A | 15.24 |
| B | 15.24 |
| C | 2.54 |
| D | 12.7 |
| E (tinggi) | 2 |
Definisi paksi: X ke kanan, Y ke atas, Z keluar dari papan; putaran mengikuti peraturan tangan kanan.
Pinout (lubang cap 12-pin)
| Tiada. | Pin | Fungsi |
|---|---|---|
| 1 | D0 | NC (dikhaskan) |
| 2 | VCC | 3.3–5 V input |
| 3 | RX | Data siri input (TTL) |
| 4 | TX | Data siri output (TTL) |
| 5 | GND | Tanah |
| 6 | SWIM | Antara muka data SWIM |
| 7 | D3 | NC (dikhaskan) |
| 8 | GND | Tanah |
| 9 | SDA | NC (dikhaskan) |
| 10 | SCL | NC (dikhaskan) |
| 11 | VCC | 3.3–5 V input |
| 12 | D2 | NC (dikhaskan) |
Sambungan MCU: TTL serial; cross-connect TX↔RX (MCU-TX → WT1-IMU RX, MCU-RX → WT1-IMU TX), VCC dan GND adalah sama.
Perisian & Pembangunan
-
Papan Pemuka: pandangan langsung sudut, pecutan, kelajuan sudut, medan magnet, kuaternion, dan lain-lain.
-
Menu Konfigurasi: pecutan & kalibrasi magnet, arah penempatan, frekuensi/bandwidth output, baud-rate, mod tidur.
-
Perekodan/Eksport: cepat log dan eksport ke TXT/BIN/PLAY atau tampal ke Excel (XLS).
-
Alat: contoh/SDK untuk MATLAB, Python, Raspberry Pi, STM32, ROS, Arduino, C/C#.
-
Fixture pembakaran ujian pilihan untuk flashing/bring-up plug-and-play.
Aplikasi Tipikal
Paparan kepala, penjejakan pergerakan, robotik, AGV/UGV, pemanduan tanpa pemandu, pemantauan sikap perlombongan/tower/industri, peralatan automasi, R&D pesawat berawak, pemantauan keselamatan, dan ladang pintar/automatik.
Butiran

Sensor sudut dua paksi, kos efektif, stabil, dengan algoritma penapis Kalman, disahkan ISO9001.
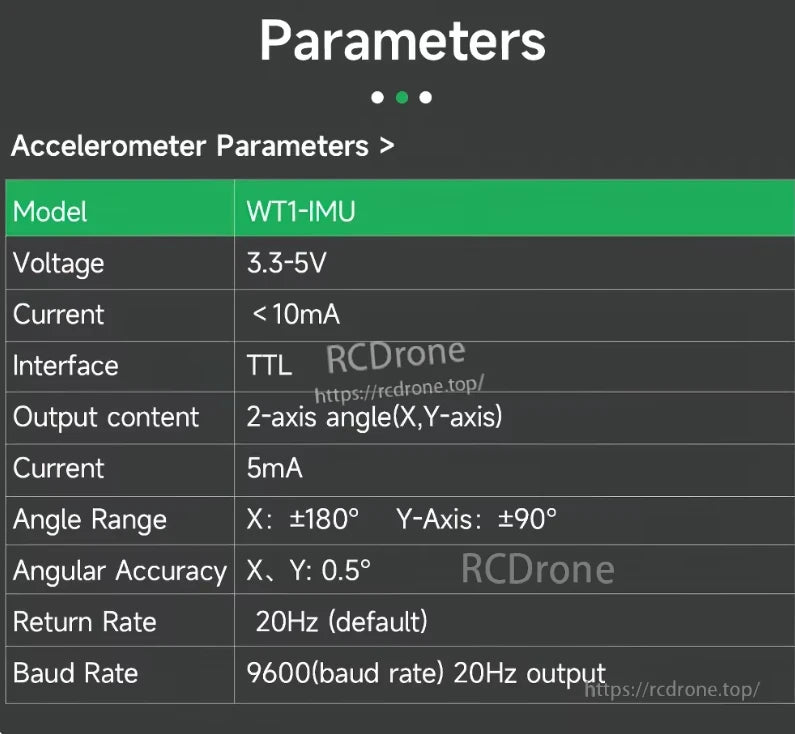
WT1-IMU accelerometer beroperasi pada 3.3-5V, <10mA arus, antara muka TTL. Mengeluarkan sudut 2-paksi (X: ±180°, Y: ±90°) dengan ketepatan 0.5°. Kadar pulangan lalai 20Hz, kadar baud 9600.
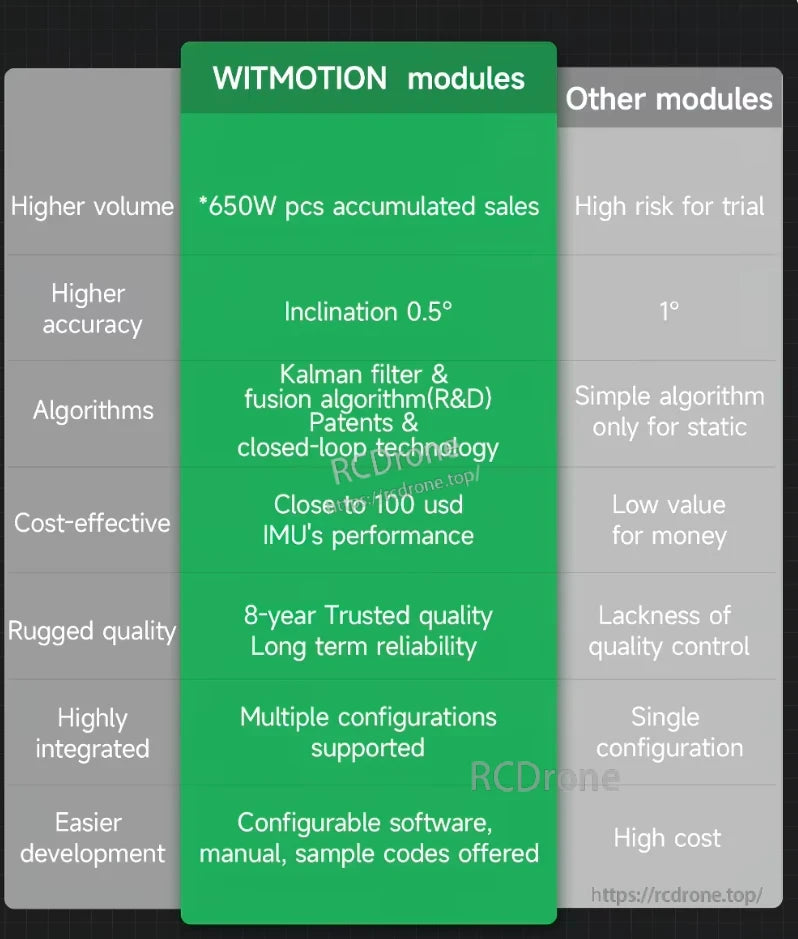
Modul WitMotion menyediakan volum tinggi, ketepatan, dan kos efektif dengan reka bentuk yang kukuh, pelbagai konfigurasi, dan pembangunan yang mudah. Ia termasuk jualan 650W, 0.5° kecenderungan, penapis Kalman, teknologi gelung tertutup, dan perisian yang boleh dikonfigurasi. Modul lain menawarkan prestasi yang lebih rendah, ciri yang lebih sedikit, dan risiko yang lebih tinggi.
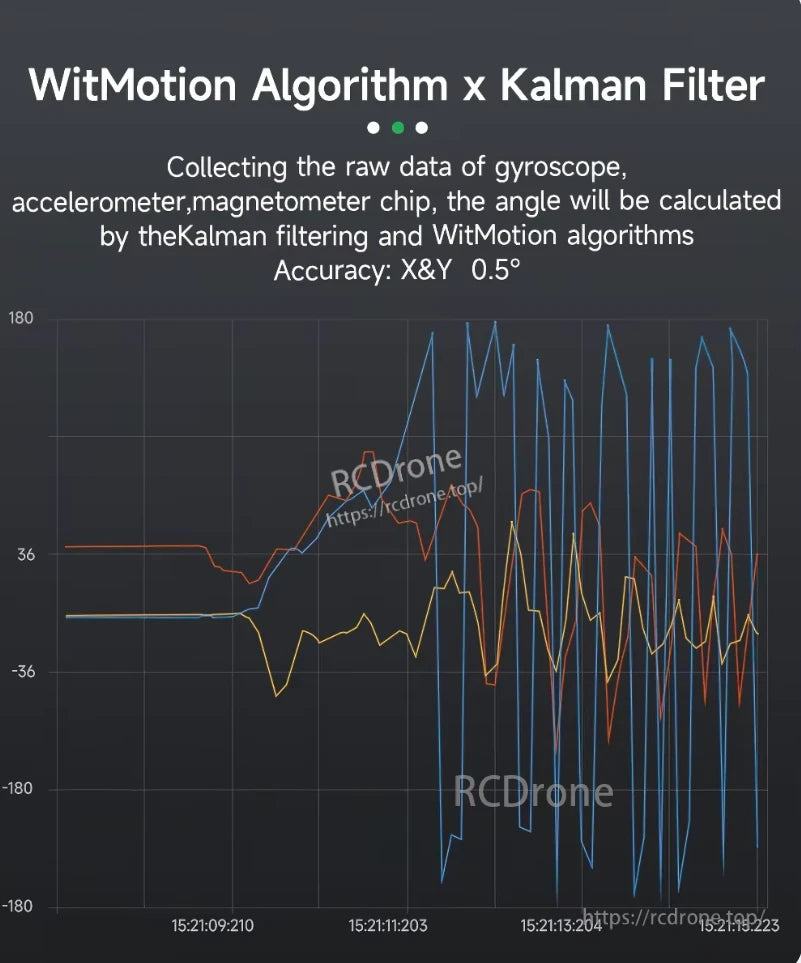
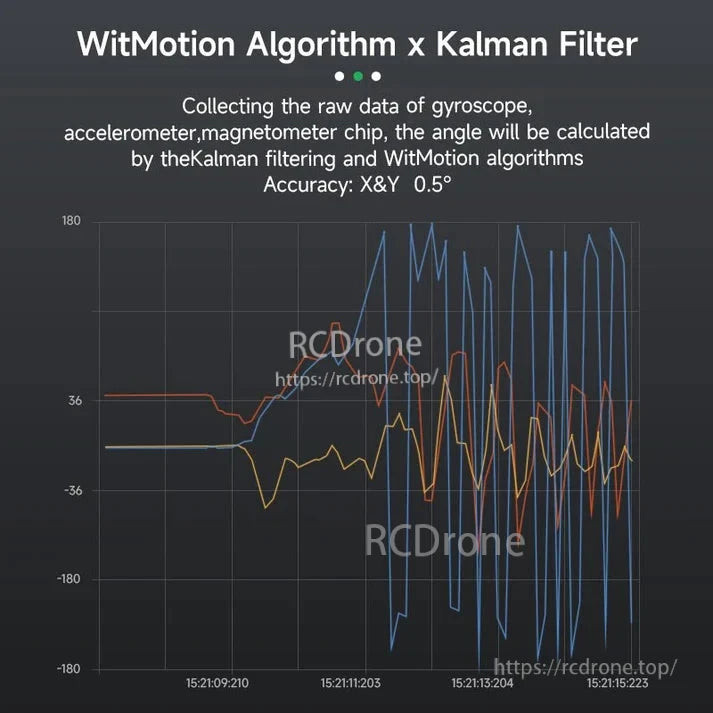
Algoritma WitMotion x Penapis Kalman. Mengumpul data mentah dari giroskop, akselerometer, magnetometer. Mengira sudut menggunakan penapisan Kalman dan algoritma WitMotion. Ketepatan: X&Y 0.5°.
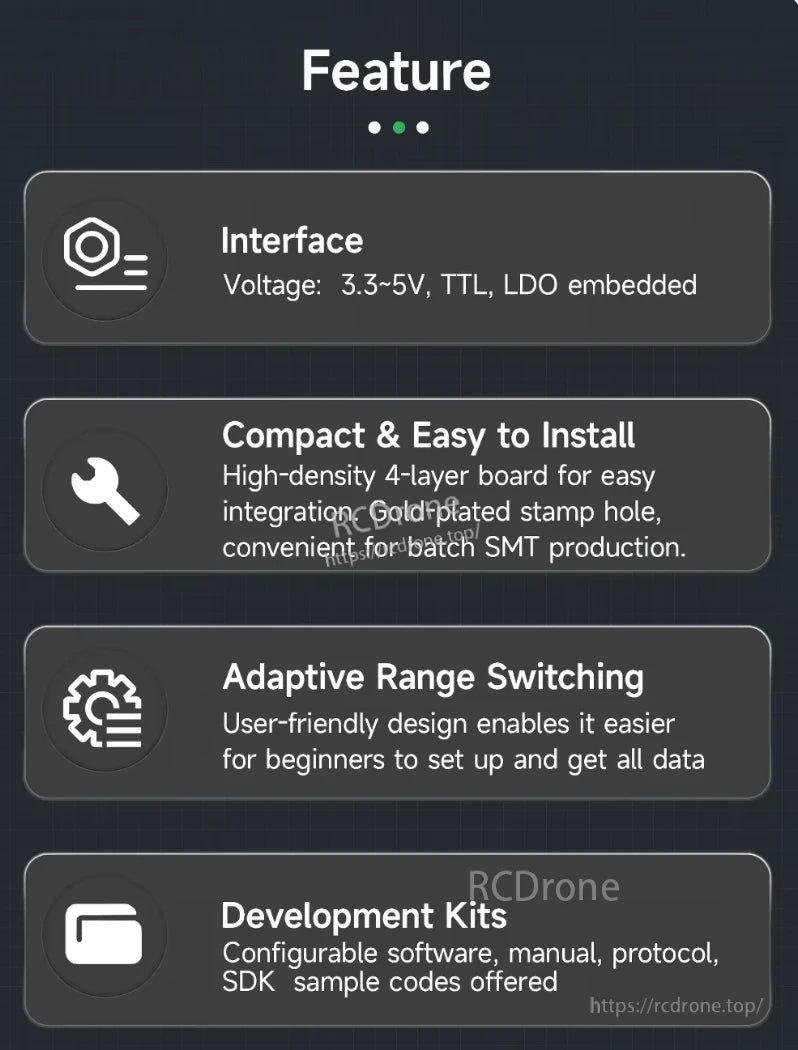
Antara muka: 3.3~5V, TTL, LDO terbenam. Kompak & mudah dipasang dengan papan 4-lapisan berketumpatan tinggi dan lubang cap yang disalut emas. Penukaran julat adaptif untuk pemula. Kit pembangunan termasuk perisian, manual, protokol, SDK, dan kod contoh.
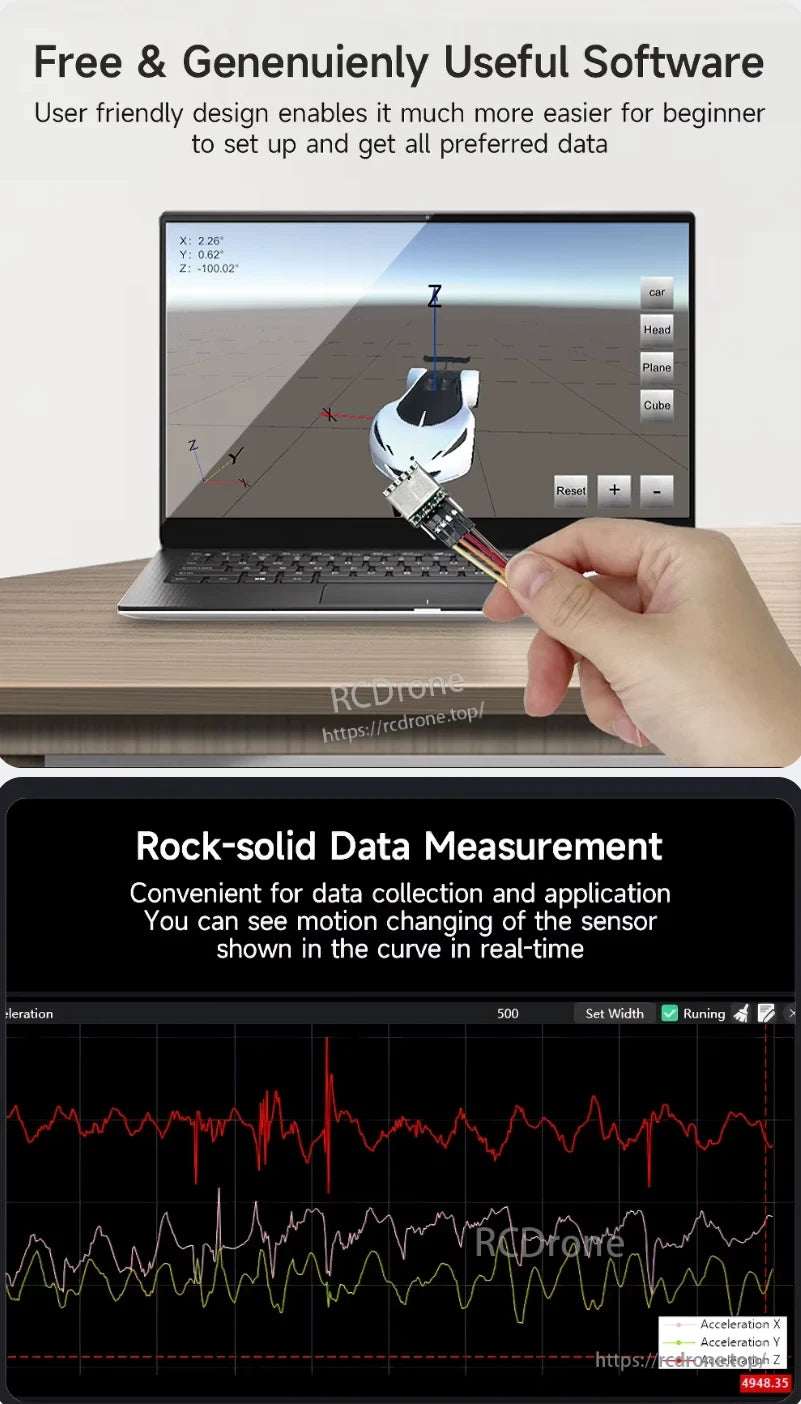
Perisian percuma &dan benar-benar berguna menawarkan reka bentuk mesra pengguna untuk pemasangan dan pengambilan data yang mudah. Penjejakan gerakan masa nyata dengan pengukuran data yang kukuh memaparkan perubahan pecutan dalam paksi X, Y, Z melalui lengkung dinamik.
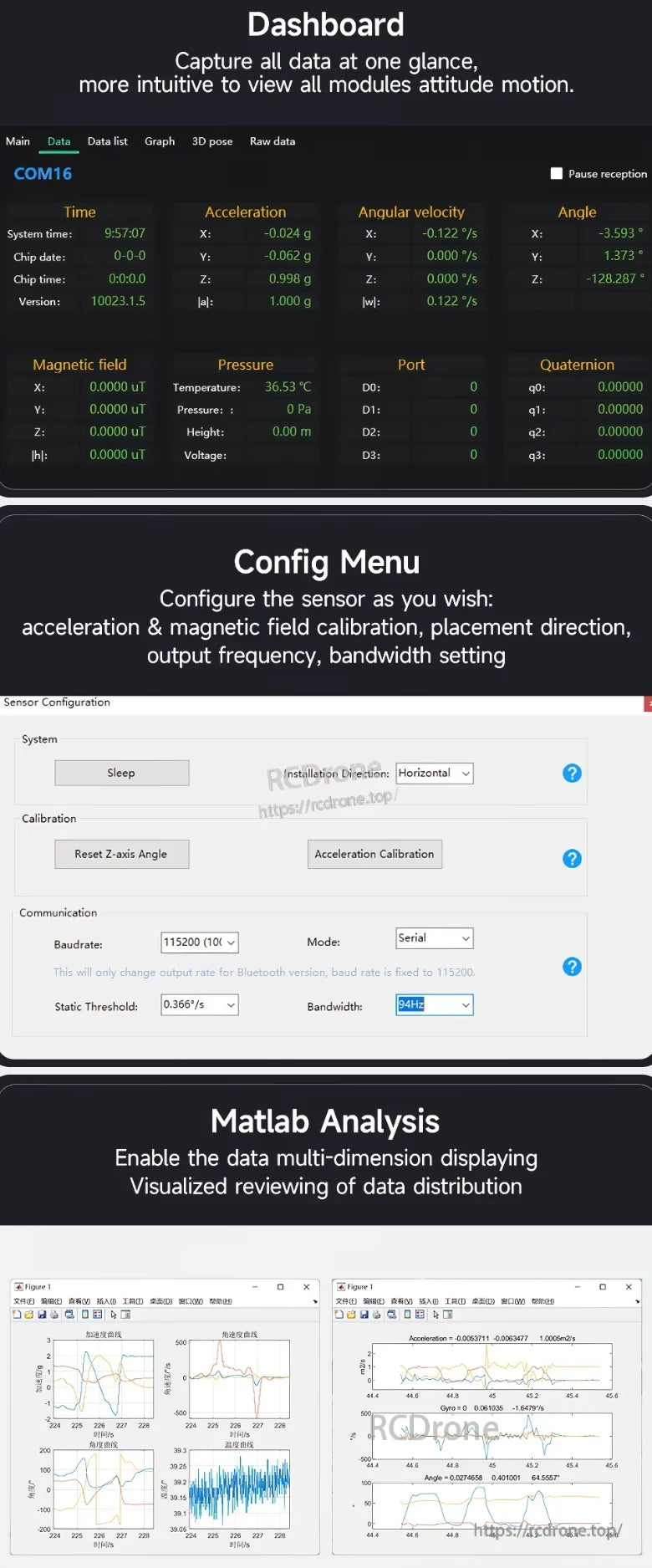
Papan pemuka memaparkan data sensor masa nyata termasuk pecutan, kelajuan sudut, sudut, medan magnet, tekanan, dan kuaternion. Menu konfigurasi membolehkan kalibrasi, arah pemasangan, kadar baud, dan tetapan lebar jalur. Analisis Matlab membolehkan visualisasi data multidimensi.
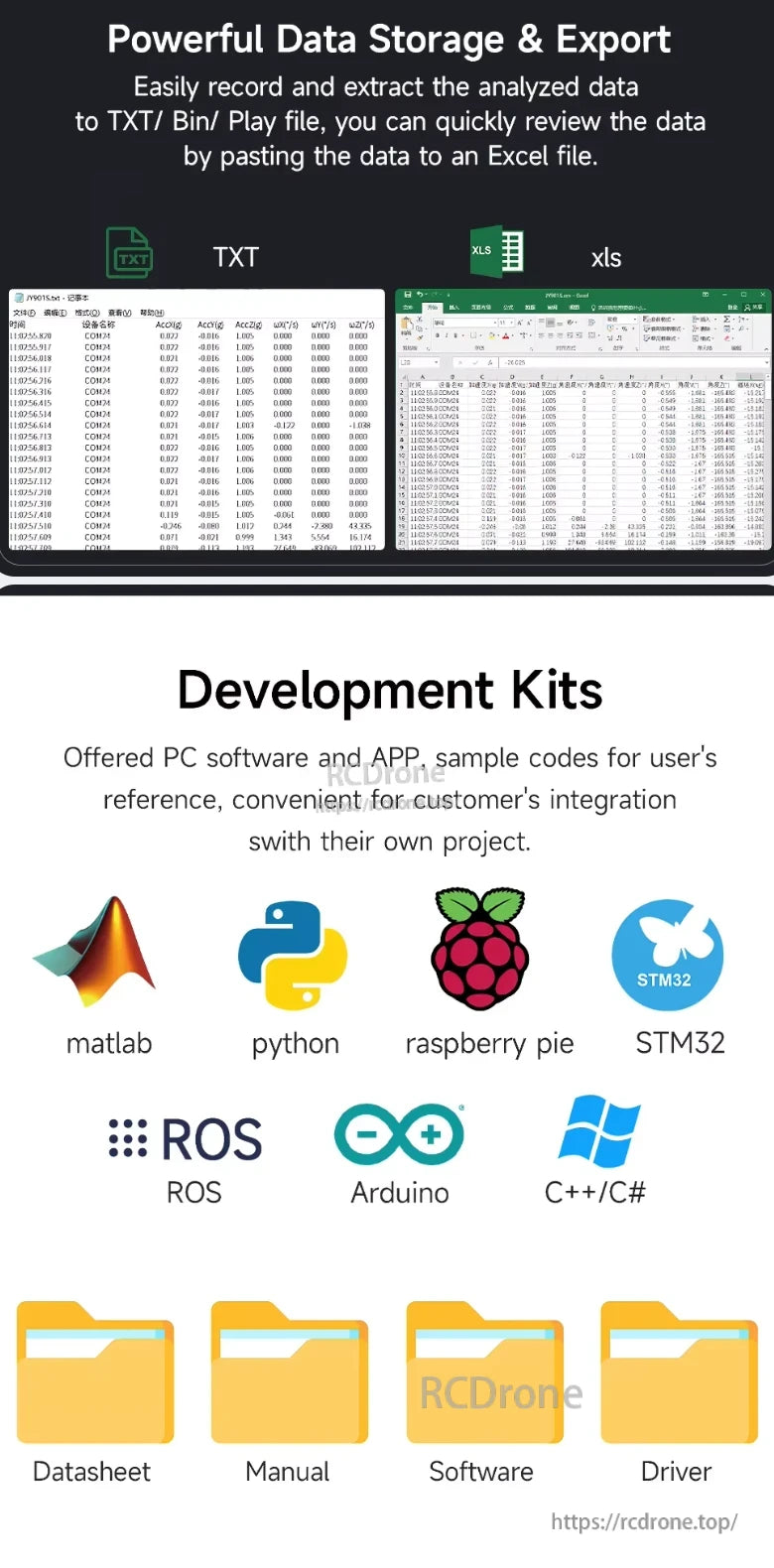
Penyimpanan data yang kuat dan eksport ke fail TXT, BIN, atau Play; serasi dengan MATLAB, Python, Raspberry Pi, STM32, ROS, Arduino, C++/C#. Termasuk lembaran data, manual, perisian, dan pemacu untuk integrasi yang mudah.
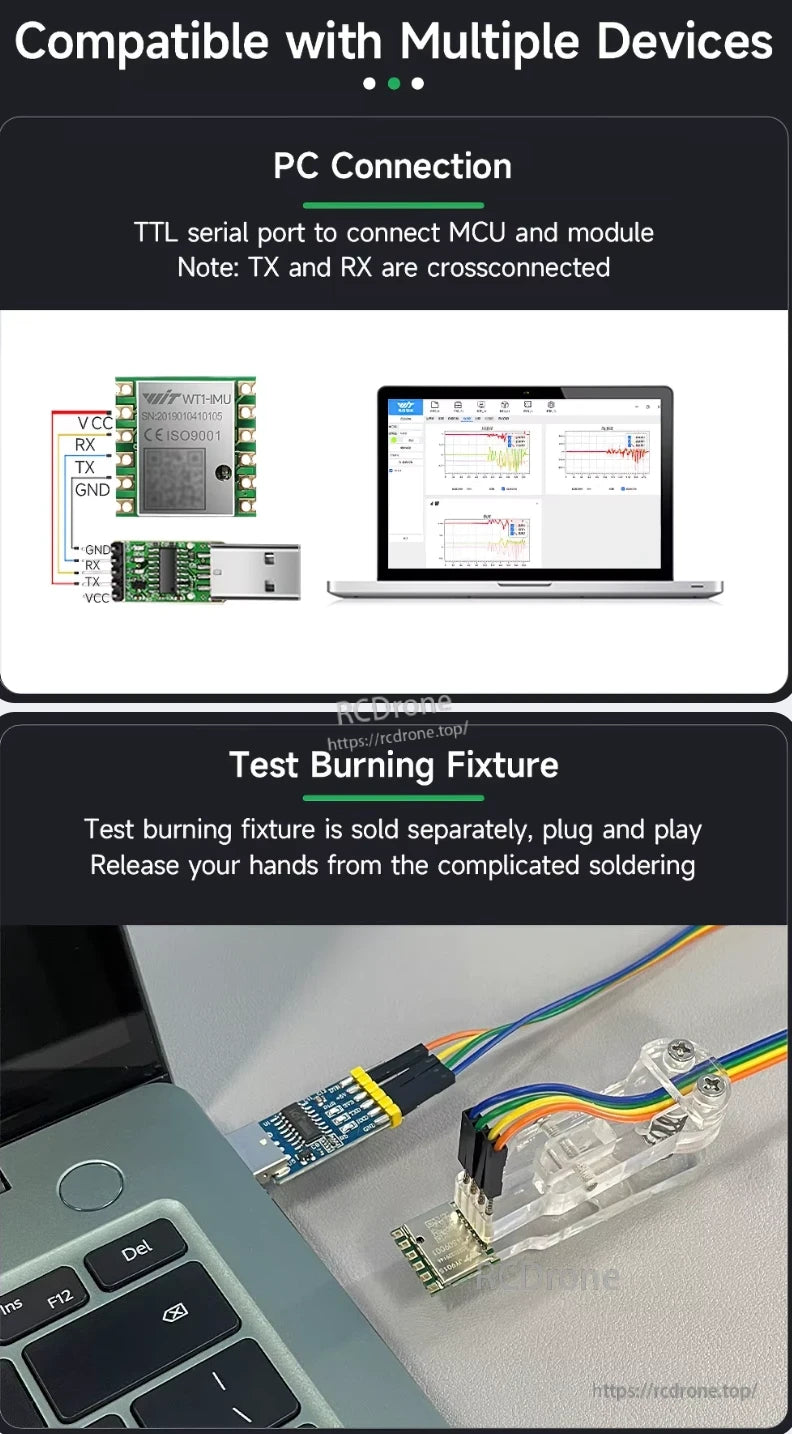
WitMotion WT1-IMU menyokong sambungan PC melalui port siri TTL dengan TX dan RX yang disambungkan silang.Serasi dengan pelbagai peranti. Fixture pembakaran ujian dijual secara berasingan, plug and play untuk penyediaan yang mudah tanpa penyolderan.
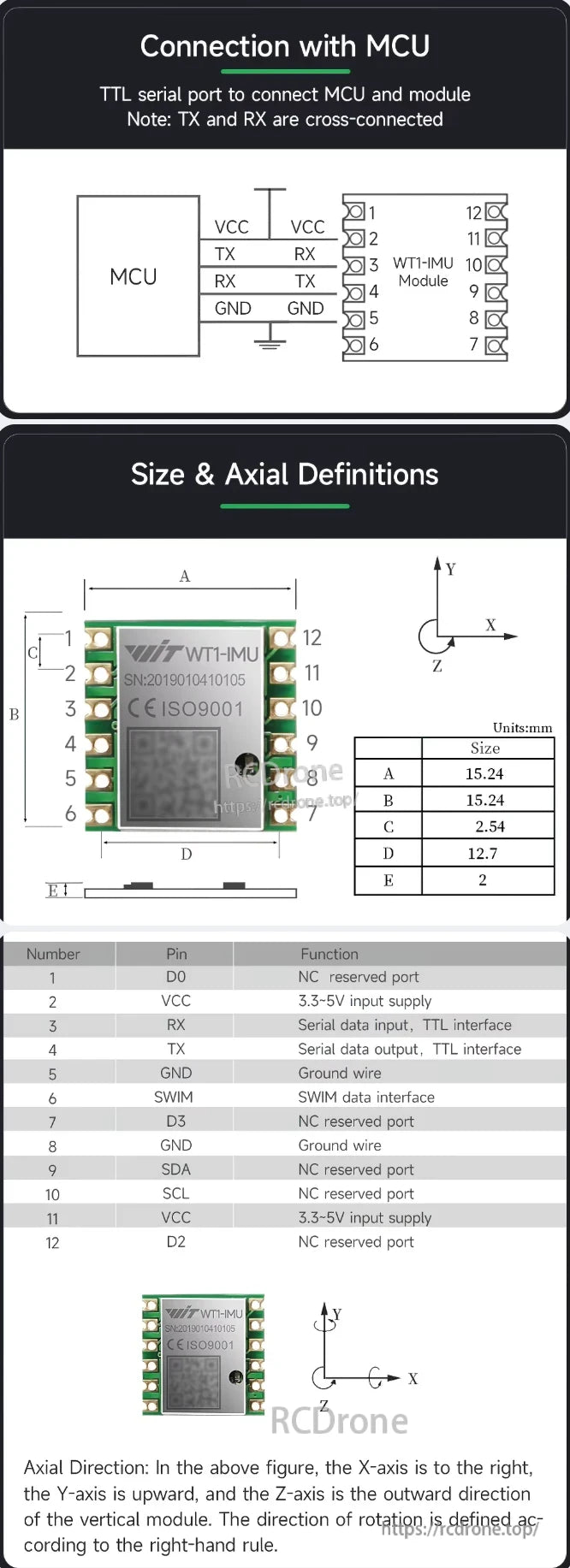
Sensor sudut dua paksi WitMotion WT1-IMU menawarkan sambungan serial TTL, susun atur 12-pin, saiz kompak 15.24×15.24×2.54 mm, paksi peraturan tangan kanan, dan termasuk pin VCC, GND, TX, RX, SWIM, SDA, SCL.

Aplikasi sensor IMU: perlombongan, pertanian, robotik, menara, automasi, dron, penjejakan, pemantauan.
Related Collections