WitMotion WT61 IMU (MPU6050) – 6-Paksi Pecutan + Giroskop dengan Output Sudut, Kalman AHRS, TTL Serial, 20/100 Hz, 3.3–5 V untuk Arduino/Raspberry Pi/PC
WitMotion WT61 IMU (MPU6050) – 6-Paksi Pecutan + Giroskop dengan Output Sudut, Kalman AHRS, TTL Serial, 20/100 Hz, 3.3–5 V untuk Arduino/Raspberry Pi/PC
WitMotion
Tidak dapat memuatkan ketersediaan pengambilan
Overview
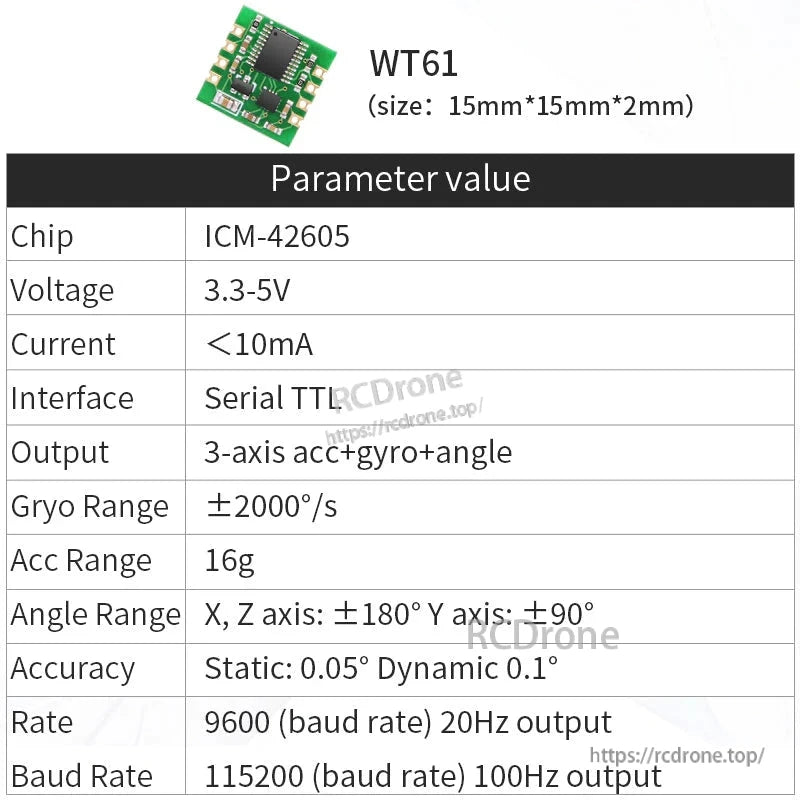
WitMotion WT61 adalah sensor sikap MEMS 6-sumbu yang mengeluarkan 3-sumbu percepatan, 3-sumbu kelajuan sudut, dan sudut terfusi (roll/pitch/yaw). Ia menggunakan MCU 48 MHz dengan IMU terbenam (MPU6050, mengikut penamaan model) dan penggabungan dinamik WitMotion + penapisan Kalman untuk memberikan kestabilan tinggi, bunyi rendah, dan hasil sudut yang tepat. Modul ini berkomunikasi melalui Serial TTL dan sangat kecil (15.24 × 15.24 × 2 mm, ~1 g), menjadikannya mudah untuk disematkan dalam peranti IoT, robot, mesin mudah alih, pemantauan struktur, elektronik pengguna, dan alat VR.
Ciri Utama
-
3 output: percepatan, kelajuan sudut, dan sudut (sikap).
-
Algoritma penggabungan: penggabungan dinamik + penapisan Kalman; warisan algoritma sikap gred satelit; ketepatan sudut 0.05° (statik), 0.1° (dinamik).
-
Perkakasan berkualiti tinggi: 48 MHz inti MCU, cip kuasa stabil, pad tembaga terendam emas, sensor MEMS terbenam.
-
Ringan & kecil: 15.24 × 15.24 × 2 mm, ~1 g; sokongan pemasangan mendatar/menegak.
-
Kadar data boleh dipilih & baud: 20 Hz / 100 Hz kadar pulangan; 9600 / 115200 bps.
-
Aplikasi Android + perisian Windows: pemetaan masa nyata, rakaman, pandangan data mentah, eksport TXT, penonton demo 3D, dan konfigurasi yang kaya (lebar jalur, kadar output, penempatan, ambang, tidur, reset paksi-Z).
-
Contoh SDK &: Matlab, Python, Raspberry Pi, STM32, ROS, Arduino, C/C++.
-
Dokumentasi & alat: lembaran data, manual, MiniIMU.exe, pemacu CH340/CP2102, video demo.
-
Kualiti & sokongan: laporan kalibrasi kilang ditunjukkan; RoHS, CE, ISO 9001.
Spesifikasi Teknikal
| Item | Butiran |
|---|---|
| Model / Jenama | WT61 / WitMotion |
| Voltan Bekalan | 3.3 V ~ 5 V |
| Arus | < 10 mA |
| Antaramuka | Serial TTL |
| Kandungan Output | pecutan 3-paksi, kelajuan sudut 3-paksi, sudut |
| Julat Pecutan | ±2/±4/±8/±16 g (adaptif) |
| Julat Gyro | ±2000 °/s |
| Julat Sudut | X, Z: ±180°; Y: ±90° |
| Ketepatan Sudut | X/Y statik 0.05°; dinamik 0.1° |
| Stabiliti (bias) | Pecutan: 0.01 g; Gyro: 0.05 °/s; Sudut (XY): 0.01° |
| Kadar Pulangan | 20 Hz / 100 Hz |
| Kadar Baud | 9600 / 115200 bps |
| Resolusi Pecutan | ±2 g: 0.061 mg/LSB (16384 LSB/g); ±4 g: 0.12 mg/LSB (8192 LSB/g); ±8 g: 0.25 mg/LSB (4096 LSB/g); ±16 g: 0.5 mg/LSB (2048 LSB/g) |
| Saiz / Berat | 15.24 × 15.24 × 2 mm (0.6″ × 0.6″ × 0.08″) / ~1 g |
| Suasana Operasi. | –40 °C hingga +85 °C |
| Definisi Paksi | Koordinat Cartesian, aturan tangan kanan |
| Pemasangan | Horisontal atau Menegak |
Penyambungan & Mekanikal
Garis besar papan (mm): A = 15.24, B = 15.24, C = 2.54, D = 12.7, E = 2.
Paku:
| # | Nama | Fungsi |
|---|---|---|
| 1 | D0 | NC terpelihara |
| 2 | VCC | 3.3–5 V |
| 3 | RT | Data siri input, tahap TTL |
| 4 | TX | Data siri output, tahap TTL |
| 5 | GND | Tanah |
| 6 | SWIM | Antara muka data SWIM |
| 7 | D2 | NC terpelihara |
| 8 | VCC | 3.3–5 V |
| 9 | SCL | NC terpelihara |
| 10 | SDA | NC terpelihara |
| 11 | GND | Tanah |
| 12 | D3 | NC terpelihara |
Pengkabelan MCU (rajah ditunjukkan): TTL serial ke host MCU dengan TX↔RX sambungan silang (VCC, TX, RX, GND).
Perisian, Aplikasi & Alat
-
Aplikasi Android: sambungkan melalui USB-to-TTL + OTG telefon; plot masa nyata untuk Acc/Gyro/Angle; Rekod butang; menu modul (3-paksi / 6-paksi / 9-paksi / BLE5.0 / WT901-WIFI); halaman Konfig yang kaya (kalibrasi acc, arah pemasangan, kadar pengambilan, lebar jalur pengukuran, ambang pengesanan statik, pemilihan corak).
-
Windows PC (MiniIMU.exe): pengukur sikap langsung, lengkung masa nyata (“Pengukuran Data yang Kukuh”), Penyimpanan Data & Eksport (data mentah dan diproses ke dalam gaya TXT/CSV), Menu Konfigurasi (baudrate 115200, mod=Serial, pemilihan arah, lebar jalur e.g. , 94 Hz, tidur, menetapkan semula paksi-Z kepada 0°).
-
Demo 3D: memvisualisasikan gerakan sensor; kod sumber 3D ditawarkan (seperti yang dinyatakan).
-
Fixture ujian: pilihan clamp plug-and-play untuk pendawaian tanpa penyolderan (dijual secara berasingan).
Algoritma & Prestasi
-
Algoritma WitMotion × Penapis Kalman: diperoleh daripada Kaedah Penentuan Sikap Satelit Aeroangkasa ; menggabungkan penggabungan kinetik, penapisan digital, anggaran keadaan; memberikan 0.05°/0.1° ketepatan sudut dan kestabilan bias yang sangat baik / bunyi rendah (plot dan lencana ditunjukkan).
Aplikasi Tipikal
Peranti IoT, pemantauan alam sekitar, perlindungan struktur bangunan, robotik & automasi, minyak & tenaga, mesin mudah alih , industri perlombongan, elektronik pengguna, alat VR.
Pematuhan & Sokongan
-
Sijil yang ditunjukkan: Laporan Kalibrasi, RoHS, CE, ISO 9001.
-
Nota kad perbandingan: diuji di kilang sebelum penghantaran, SDK tersedia, jaminan 12 bulan, sokongan teknikal seumur hidup dari WitMotion R&D.
Nota & Aksesori
-
Termasuk: modul WT61.
-
Pilihan: penukar USB-ke-TTL, penyesuai OTG telefon, akrilik fixture ujian pengapit.
-
Gunakan konvensyen koordinat tangan kanan dan ikuti arah pemasangan mendatar/menegak yang ditunjukkan dalam perisian untuk ketepatan terbaik.
Butiran

WitMotion WT61 IMU menyediakan ketepatan pitch 0.05deg, penapisan digital, algoritma penggabungan, dan termasuk ciri-ciri pecutan, gyro, sudut, getaran, MCU, dan penapisan.

WitMotion WT61 IMU menawarkan output pecutan 3-paksi, gyro, dan sudut. Ia menyokong 3.3V-5V, arus rendah, TTL bersiri, julat adaptif ±2/4/8/16g, ketepatan tinggi, saiz kompak, ringan, dan julat suhu yang luas.

WitMotion WT61 IMU menawarkan ketepatan tinggi dengan penapisan Kalman, pensijilan termasuk RoHS, CE, ISO-9001. Ciri-ciri 48MHz MCU, sensor MEMS, cip kuasa stabil, dan antara muka tembaga yang disalut emas.

Algoritma WitMotion x Penapis Kalman. Algoritma WitMotion berasal dari Algoritma Penentuan Sikap Satelit Aeroangkasa, digabungkan dengan penapisan Kalman dan penggabungan dinamik gerakan. Ketepatan sudut: Paksi X, Y: 0.05° (Statik), 0.1° (Dinamik). Graf menunjukkan data sudut dari masa ke masa, dengan garis biru, merah, dan kuning mewakili pengukuran atau output yang ditapis yang berbeza. Cap masa berkisar dari 15:21:09:210 hingga 15:21:15:223. Paksi menegak merangkumi dari -180 hingga 180 darjah.

WitMotion WT61 IMU untuk IoT, pemantauan alam sekitar, robotik, automasi, perlombongan, jambatan, alat VR, dan aplikasi industri.

WitMotion IMU menyediakan ketepatan tinggi, kestabilan, saiz kompak, komponen unggul, SDK, ujian kilang, dan sokongan sepanjang hayat.Ia termasuk penapisan Kalman, algoritma penggabungan, dan jaminan selama 12 bulan, mengatasi yang lain.

WitMotion WT61 IMU mempunyai susun atur 12-pin dengan VCC, GND, TX, RX, SCL, SDA, SWIM, dan port yang diperuntukkan; termasuk butiran saiz dalam mm.

WitMotion WT61 IMU disambungkan melalui USB ke penyesuai OTG untuk melihat dan merakam data telefon pintar. Aplikasi Android pelbagai fungsi memaparkan data sensor masa nyata, termasuk sudut, pecutan, dan cap waktu, dengan pilihan untuk konfigurasi dan log data.

WitMotion WT61 IMU menawarkan penyediaan yang mudah, fungsi plug-and-play, dan pengukuran sikap masa nyata dengan bacaan sudut.

WitMotion WT61 IMU menawarkan kalibrasi, pengukuran masa nyata, dan eksport data. Memaparkan dan menyimpan pecutan, kelajuan sudut, medan magnet, dan data mentah dalam format TXT.

Demo 3D memaparkan gerakan sensor secara intuitif. SDK menyokong Matlab, Python, Raspberry Pi, STM32, ROS, Arduino, dan C++/C#. Sambungan serial TTL dengan MCU; TX dan RX disambungkan silang.

Demo 3D memvisualisasikan gerakan sensor dengan model kereta, helmet, kubus, dan drone. SDK menyokong Matlab, Python, Raspberry Pi, STM32, ROS, Arduino, dan C++/C#. Sambungan serial melalui TTL menghubungkan MCU dan modul dengan TX dan RX yang disambungkan silang.

Ujian IMU termasuk meja putar 3-paksi, gelombang getaran, suhu ekstrem, penuaan, dan penilaian suhu tinggi.


WitMotion WT61 IMU menawarkan kadar pulangan 20-100Hz, voltan 3.3-5V, dan mengesan pecutan, sudut, dan giroskop. Menyokong antara muka TTL, serasi dengan Android, PC, MCU, dan Arduino.
Related Collections