WitMotion WT901B AHRS (MPU9250) IMU 10-Paksi dengan Barometer & Penderia Kecondongan, Akselerometer ±16g, Giroskop ±2000°/s, Penapis Kalman, UART/I²C, Output 0.2–200 Hz
WitMotion WT901B AHRS (MPU9250) IMU 10-Paksi dengan Barometer & Penderia Kecondongan, Akselerometer ±16g, Giroskop ±2000°/s, Penapis Kalman, UART/I²C, Output 0.2–200 Hz
WitMotion
Tidak dapat memuatkan ketersediaan pengambilan
Tinjauan
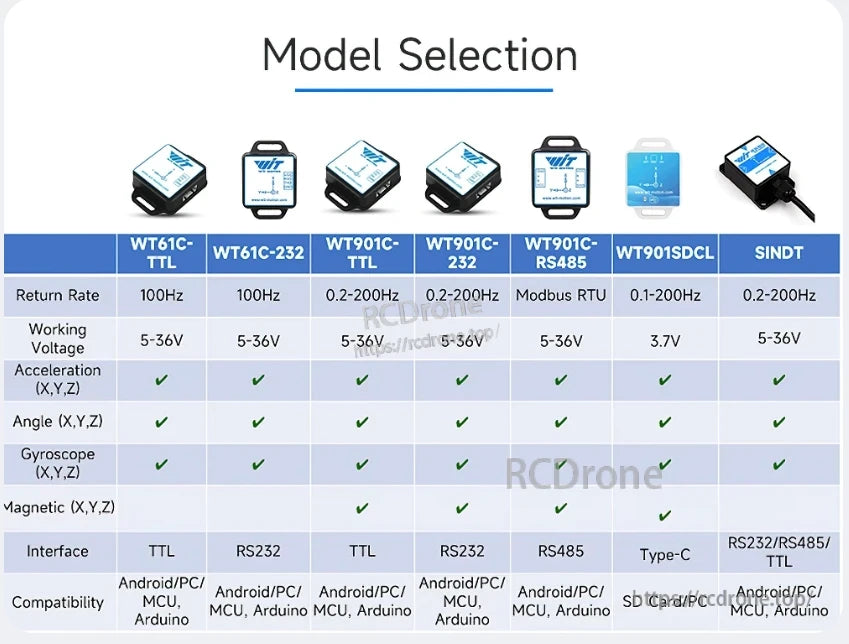
WitMotion WT901B AHRS (MPU9250) mengintegrasikan akselerometer 3-paksi, giroskop 3-paksi, magnetometer 3-paksi, dan barometer untuk memberikan sudut, pecutan, kelajuan sudut, medan magnet, tekanan udara dan ketinggian. MCU 48 MHz dengan pengawalan LDO dan algoritma penggabungan + penapis Kalman menyediakan output yang stabil dan rendah bunyi untuk robotik, pemantauan struktur, mesin mudah alih, dan peranti VR/pengguna.
Ciri Utama
-
10-paksi IMU + barometer dengan pengiraan ketinggian ( ketepatan relatif ±0.06 hPa)
-
Ketepatan sudut: X/Y 0.05° (statik), 0.1° (dinamik); Yaw 1° (dikalibrasi, gangguan rendah)
-
Output boleh dikonfigurasi 0.2–200 Hz; permulaan ≈ 1000 ms
-
Antaramuka: UART (4800–230400 bps), I²C (open-drain; memerlukan 4.7 kΩ pull-ups)
-
Bekalan 3.3–5.5 V, tipikal 12 mA @5 V, tidur 15 µA
-
Kukuh: −40–85 °C operasi, 20,000 g ketahanan kejutan
-
Perisian Windows percuma (kurva masa nyata, log ke TXT), kalibrasi magnet visual, demo 3D (sumber tersedia atas permintaan)
-
Sijil: Laporan kalibrasi, RoHS, CE, ISO9001
Spesifikasi Sudut Gulung/Pitch
| Parameter | Keadaan | Tipikal |
|---|---|---|
| Julat | — | X: ±180°, Y: ±90° |
| Inklinasi | Statik / Dinamik | 0.1° / 0.5° |
| Resolusi | Horisontal | 0.0055° |
| Drift Suhu | −40–85 °C | ±0.5–1° |
Spesifikasi Sudut (Yaw)
| Item | Keadaan | Tipikal |
|---|---|---|
| Julat | — | Z: ±180° |
| Resolusi | Horisontal | 0.0055° |
| Ketepatan& | 9-paksi (dinamik/statik) | 1° (dikalibrasi, jauh dari gangguan) |
| 6-paksi (statik) | 0.5° kesilapan kumulatif integral |
Spesifikasi Teknikal Sensor
Accelerometer
| Julat | Resolusi | H噪 (100 Hz) | Drift Statik | Drift Suhu | Lebar Jalur |
|---|---|---|---|---|---|
| ±16 g | 0.0005 g/LSB | 0.75–1 mg-rms | ±20–40 mg | ±0.15 mg/°C | 5–256 Hz |
Giroskop
| Julat | Resolusi | H噪声 RMS (100 Hz) | Drift Statik | Drift Suhu | Lebar Jalur |
|---|---|---|---|---|---|
| ±2000 °/s | 0.061 (°/s)/LSB | 0.028–0.07 (°/s)-rms | ±0.5–1 °/s | ±0.005–0.015 (°/s)/°C | 5–256 Hz |
Magnetometer & Barometer
| Julat Magnetometer | Resolusi Magnetometer | Julat Barometer | H噪声 RMS | Ketepatan Relatif |
|---|---|---|---|---|
| ±2 Gauss | 0.0667 mGauss/LSB | 300–1100 hPa | 0.5 Pa-RMS | ±0.06 hPa |
Modul & Elektrik
| Item | Min | Default | Max |
|---|---|---|---|
| Kadar Keluaran | 0.2 Hz | 10 Hz | 200 Hz |
| Voltan Masukan | 3.3 V | 5 V | 5.5 V |
| Arus Operasi (5 V) | — | 12 mA | — |
| Arus Tidur (5 V) | — | 15 µA | — |
| Suasana Operasi | −40 °C | — | 85 °C |
| Suasana Penyimpanan | −40 °C | — | 100 °C |
Dimensi & Pinout
Saiz (mm): A 15.24 × B 15.24 × C 2.54 × D 12.7 × E 2
Paksi: X→kanan, Y→atas, Z→keluar dari PCB (aturan tangan kanan)
Pins (1–12):
D0, VCC(3.3–5 V), RX(TTL dalam), TX(TTL keluar), GND, D1(sokongan GPS), D2(alarm/reset X+), VCC, SCL(alarm Y+), SDA(alarm Y−), GND, D3(alarm X−)
Konektiviti & Alat
-
UART TX↔ RX sambungan silang ke MCU
-
I²C dengan 4.7 kΩ pull-ups pada SCL/SDA
-
GPS Luaran (NMEA-0183) pendawaian untuk membina navigasi GPS-IMU (mengeluarkan latitud/longitud, ketinggian, arah, kelajuan, pemindahan)
Perisian & Kit Pembangunan
Pakej PC Windows untuk konfigurasi, kalibrasi (accel/mag/sudut/tinggi), pemilihan lebar jalur/kadar, dan log mentah/lengkung. Sumber contoh untuk Matlab, Python, Raspberry Pi, STM32, ROS, Arduino, C/C#; Pemacu CH340/CP2102; aplikasi Android; video demo; Manual.pdf & Datasheet.pdf.
Aplikasi
Pengesanan IoT, pemantauan jambatan persekitaran, automasi robotik, forklift dan mesin mudah alih, perlombongan, elektronik pengguna, alat VR.
Butiran

Barometer AHRS yang Berkesan Kos Menyediakan Ketepatan Tinggi untuk Sudut Z-Axis, Inklinasi, dan Tekanan Udara, Ditambah dengan Pengukuran Pecutan, Sudut Gyro, Ketinggian Magnetik, dan Tekanan Udara.

WitMotion WT901B AHRS IMU termasuk accelerometer, gyroskop, magnetometer, dan barometer. Menawarkan ±16g, ±2000°/s, ±2 Gauss, 300-1100hPa. Resolusi tinggi, bunyi rendah, lebar jalur luas, kestabilan suhu -40°C hingga +85°C.

AHRS IMU WT901B menawarkan ±180° roll/pitch/yaw, resolusi 0.0055°, ketepatan 1°, algoritma 9-paksi, UART/IIC, output 200Hz, julat suhu -40°C hingga 85°C, input 3.3V-5.5V.
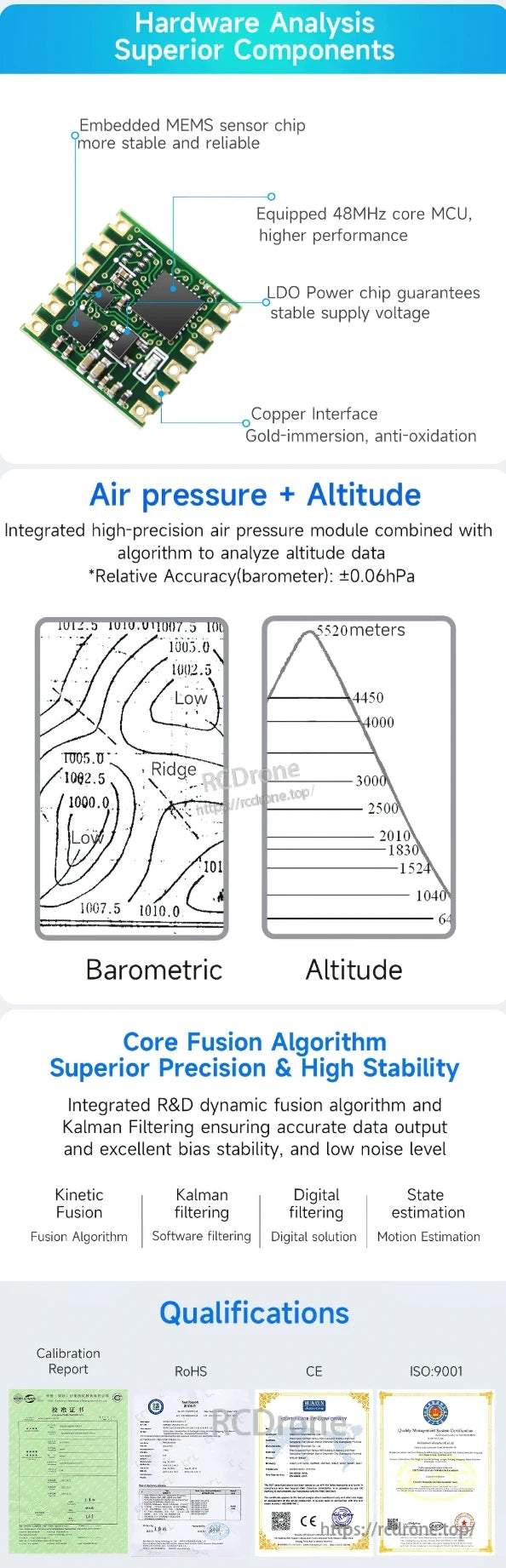
WT901B AHRS IMU mempunyai sensor MEMS, MCU 48MHz, cip kuasa LDO, dan antara muka tembaga yang disalut emas. Ia menyediakan ketepatan tekanan ±0.06hPa, algoritma penggabungan yang stabil, dan memenuhi piawaian RoHS, CE, dan ISO:9001.

AHRS IMU WT901B menggunakan WitMotion algoritma dengan penapis Kalman untuk ketepatan sudut tinggi. Sesuai untuk IoT, VR, robotik, perlombongan, jambatan, dan pemantauan alam sekitar.
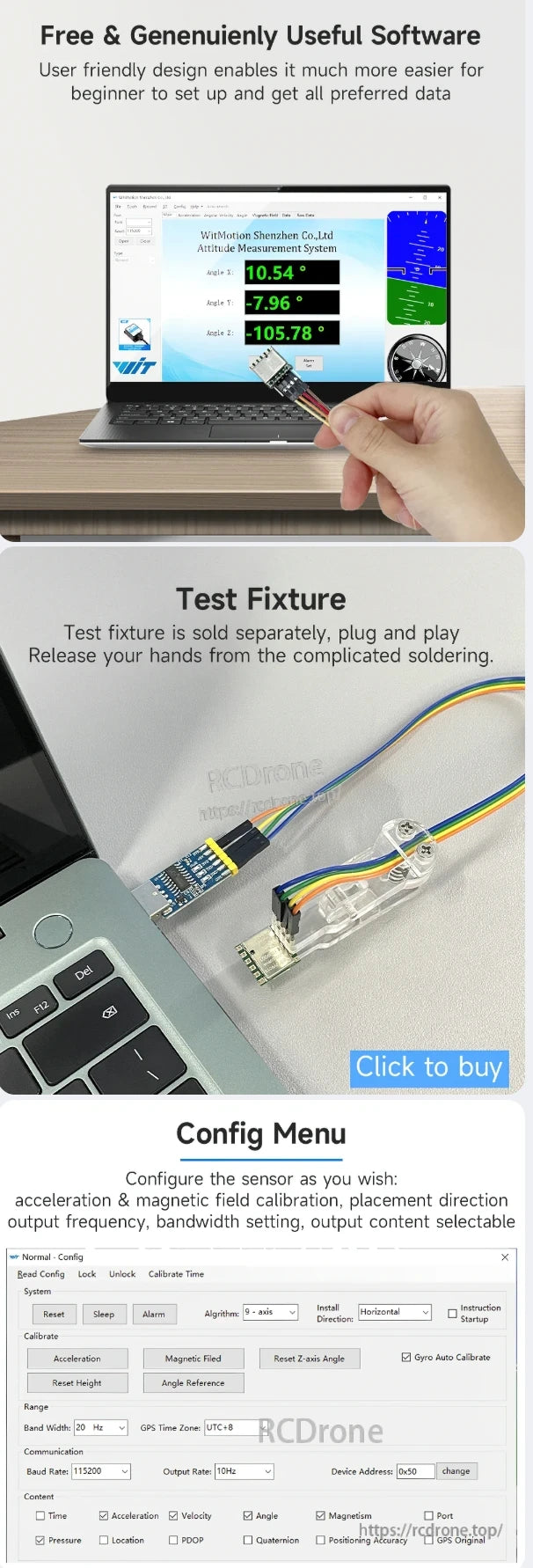
AHRS IMU WT901B menawarkan perisian mesra pengguna secara percuma, alat ujian plug-and-play, dan tetapan boleh dikonfigurasi untuk kalibrasi, output, dan pengukuran sikap yang tepat.
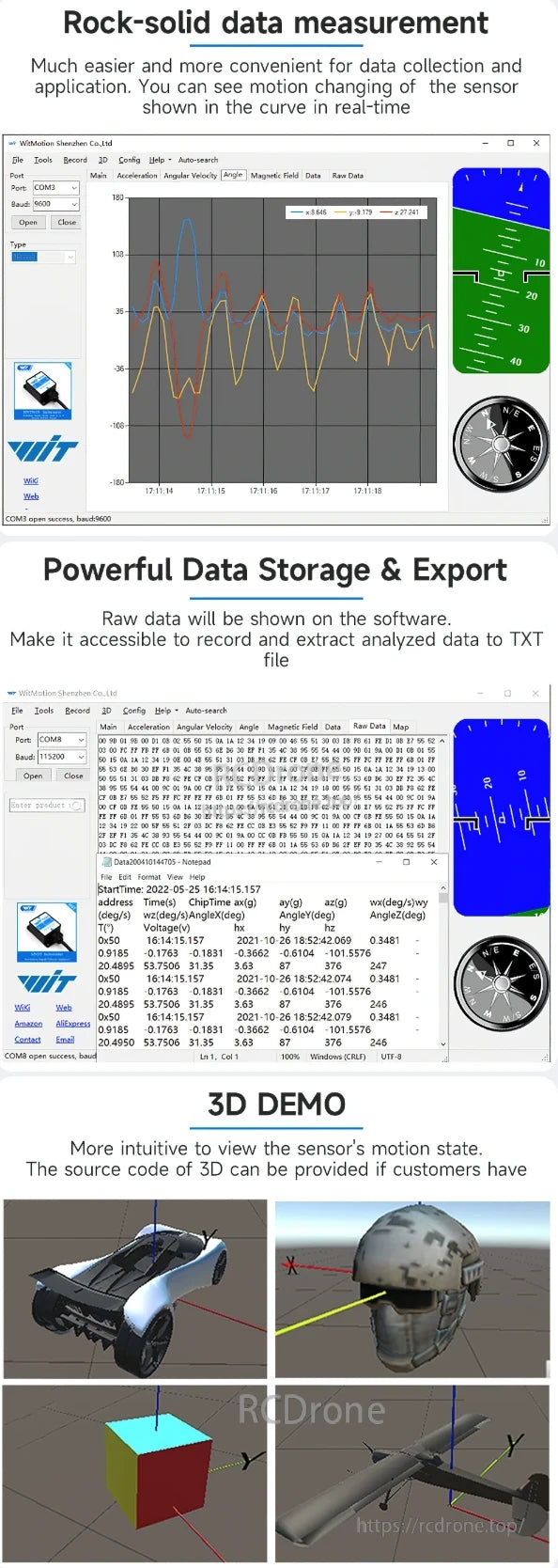
WT901B AHRS IMU menawarkan pengukuran data masa nyata, penyimpanan yang kuat dan eksport ke fail TXT, serta visualisasi gerakan 3D yang intuitif. Ciri-ciri termasuk pecutan, kelajuan sudut, data medan magnet, dan paparan kompas untuk pemantauan sensor yang tepat.

AHRS IMU WT901B menawarkan kalibrasi magnet visual, sambungan TTL/IIC MCU, keserasian GPS. Mengeluarkan latitud, longitud, ketinggian, arah, kelajuan, pemindahan untuk navigasi.
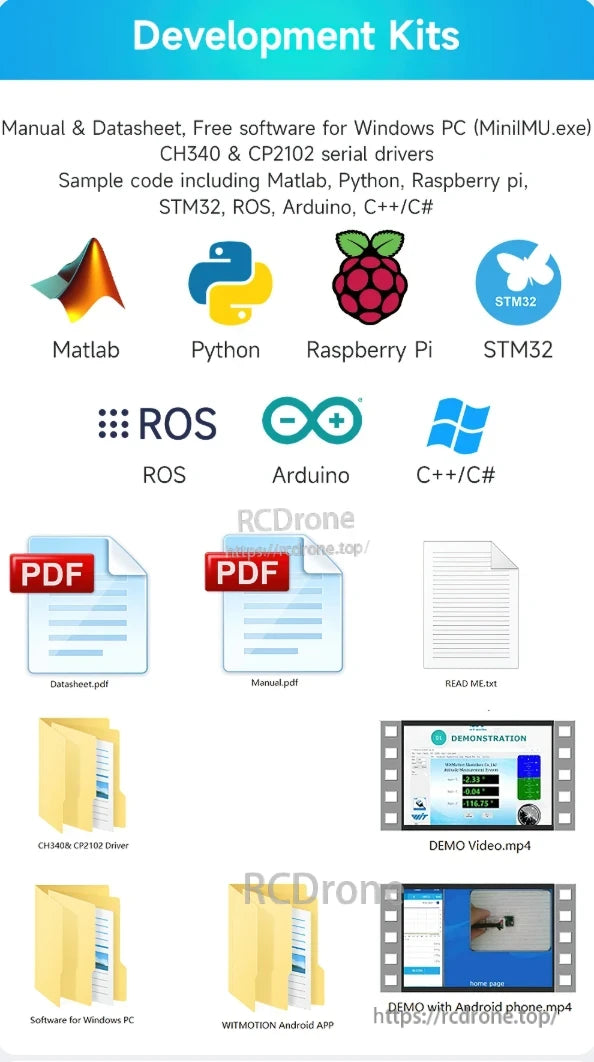
Kit Pembangunan termasuk manual, lembaran data, perisian Windows, pemacu CH340 & CP2102, kod contoh untuk Matlab, Python, Raspberry Pi, STM32, ROS, Arduino, C++/C#, dan video demo untuk Android dan PC.
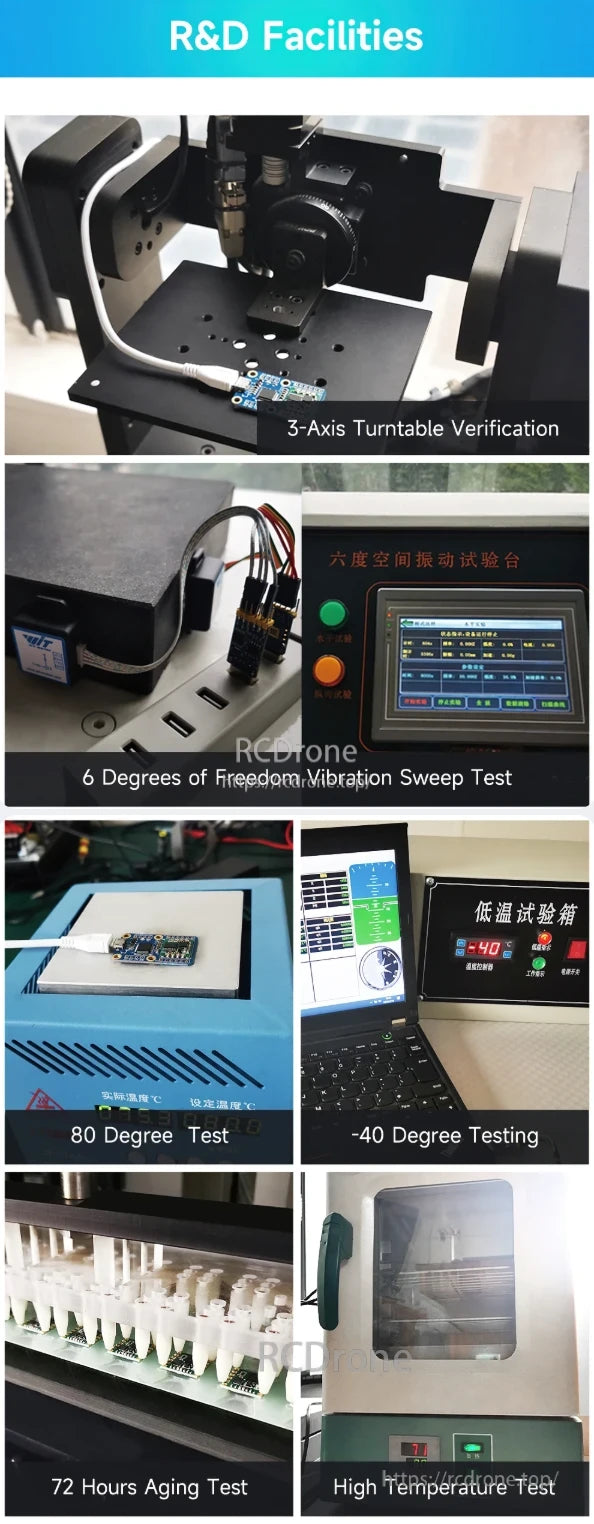
WT901B AHRS IMU menjalani ujian yang ketat: meja putar 3-paksi, getaran 6 DOF, suhu ekstrem (80°C hingga -40°C), penuaan 72 jam, dan penilaian suhu tinggi.
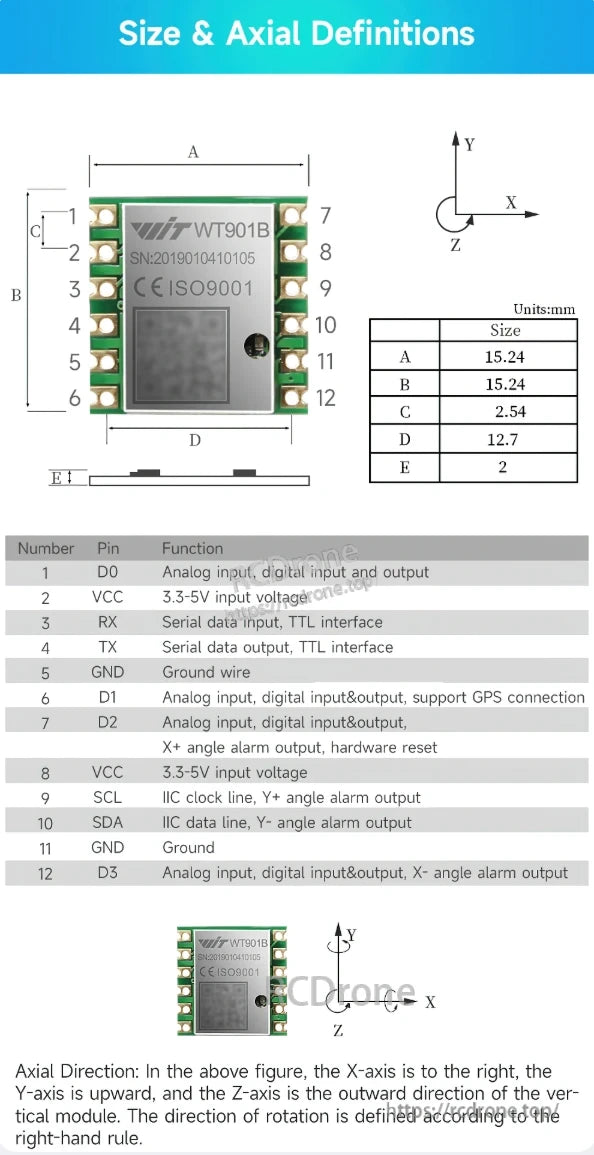
Dimensi WT901B AHRS IMU: 15.24×15.24×2.54 mm, susun atur 12-pin dengan I/O analog/digital, UART, I2C, dan output penggera. Arah paksi ditentukan oleh peraturan tangan kanan; X kanan, Y atas, Z keluar.

AHRS IMU WT901B dari WITMotion termasuk modul sensor, katalog, kad promosi dengan kod QR untuk dokumen dan sokongan.
Related Collections