












WitMotion WT901C-485 9-Paksi IMU Akselerometer Giroskop Kompas Digital (RS485/RS232/TTL), Ketepatan Sudut 0.05°, 0.2–200 Hz AHRS
WitMotion WT901C-485 9-Paksi IMU Akselerometer Giroskop Kompas Digital (RS485/RS232/TTL), Ketepatan Sudut 0.05°, 0.2–200 Hz AHRS
RCDrone
Tidak dapat memuatkan ketersediaan pengambilan
Overview
WitMotion WT901C-485 adalah IMU AHRS 9-paksi yang kompak berdasarkan suite sensor triaxial MPU9250-class (pengukur pecutan + giroskop + magnetometer) dan algoritma penggabungan/Kalman WitMotion. Ia memberikan keluaran sudut, pecutan, kelajuan sudut, medan magnet, dan quaternion dengan ketepatan statik XY 0.05° (dinamik 0.1°) dan 0.2–200 Hz kadar kemas kini yang boleh disesuaikan. Pelbagai antara muka fizikal (RS485/RS232 Modbus & TTL UART) dan julat input yang luas menjadikan WT901C-485 mudah untuk diintegrasikan dengan Arduino/STM32/MCUs, PC, dan pengawal industri. Perisian Windows rasmi (MiniIMU.exe) menyediakan graf masa nyata, demo 3D, log/data eksport, dan kalibrasi magnet visual.
Ciri utama
-
Output 9-paksi: sudut (Roll/Pitch/Yaw), 3-paksi acc/gyro/mag, quaternion.
-
Kestabilan tinggi &dan ketepatan: XY 0.05° statik, 0.1° dinamik; kestabilan pecutan 0.01 g.
-
I/O fleksibel: TTL / RS232 / RS485 (Modbus); baud 4,800–230,400 (lalai 9,600).
-
Kadar boleh laras: 0.2–200 Hz (lalai 10 Hz).
-
Bekalan luas: TTL 3.3–5 V, RS232/RS485 5–36 V; <25 mA tipikal.
-
Alat &dan SDK: Aplikasi Windows, aplikasi Android, pemacu CH340/CP2102, kod contoh untuk C/C++/STM32/Arduino/Matlab.
-
Kalibrasi magnet &dan demo 3D untuk penyediaan kali pertama; plot langsung dan eksport TXT.
-
Reka bentuk industri: –40~85 °C, 51×36×15 mm, pemasangan menegak atau mendatar.
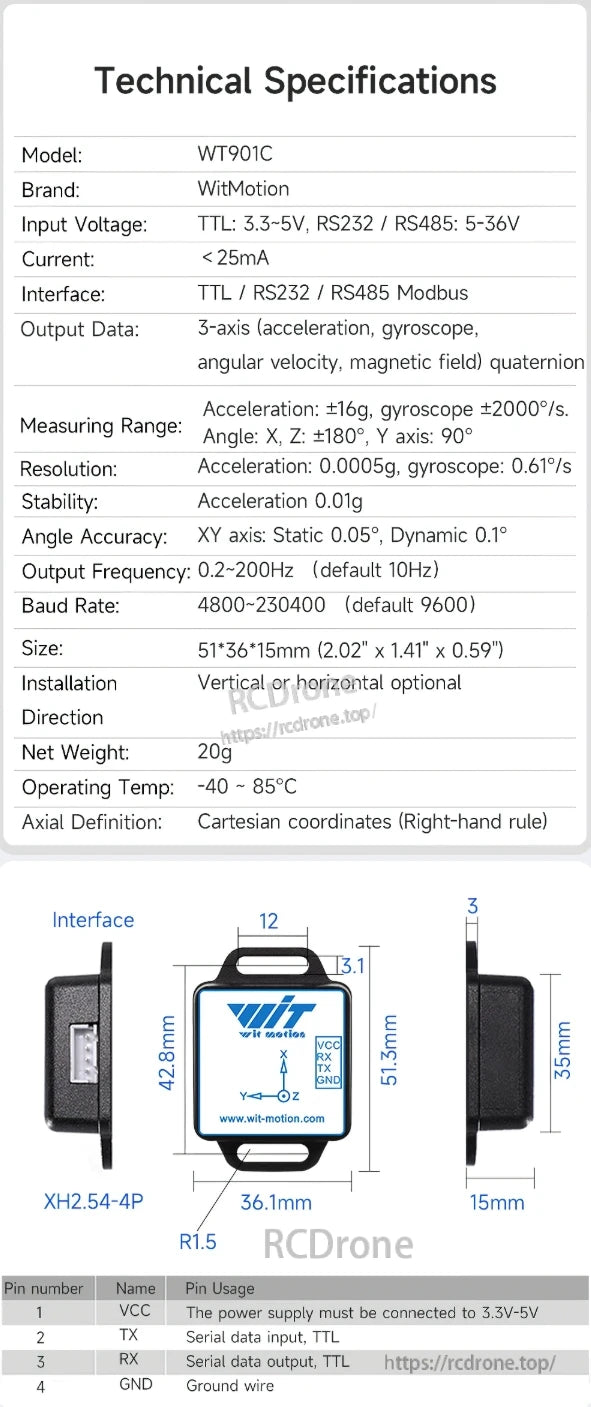
Spesifikasi teknikal
| Item | Spesifikasi |
|---|---|
| Model | WT901C (varian WT901C-485) |
| Antara muka | TTL / RS232 / RS485 (Modbus) |
| Voltan input | TTL: 3.3–5 V; RS232/RS485: 5–36 V |
| Arus | < 25 mA |
| Data output | Percepatan, kelajuan sudut, medan magnet, sudut, quaternion |
| Julat pengukuran | Acc ±16 g, Gyro ±2000 °/s; Sudut: X,Z ±180°, Y 90° |
| Resolusi | Acc 0.0005 g, Gyro 0.61 °/s |
| Kestabilan | Percepatan 0.01 g |
| Ketepatan sudut | XY statik 0.05°, dynamik 0.1° |
| Frekuesi output | 0.2–200 Hz (lalai 10 Hz) |
| Kelajuan baud | 4,800–230,400 (lalai 9,600) |
| Saiz / berat | 51×36×15 mm, 20 g |
| Suasana operasi | –40 ~ 85 °C |
| Paksi | Cartesian, kaedah tangan kanan |
| Pemasangan | Menegak atau mendatar |
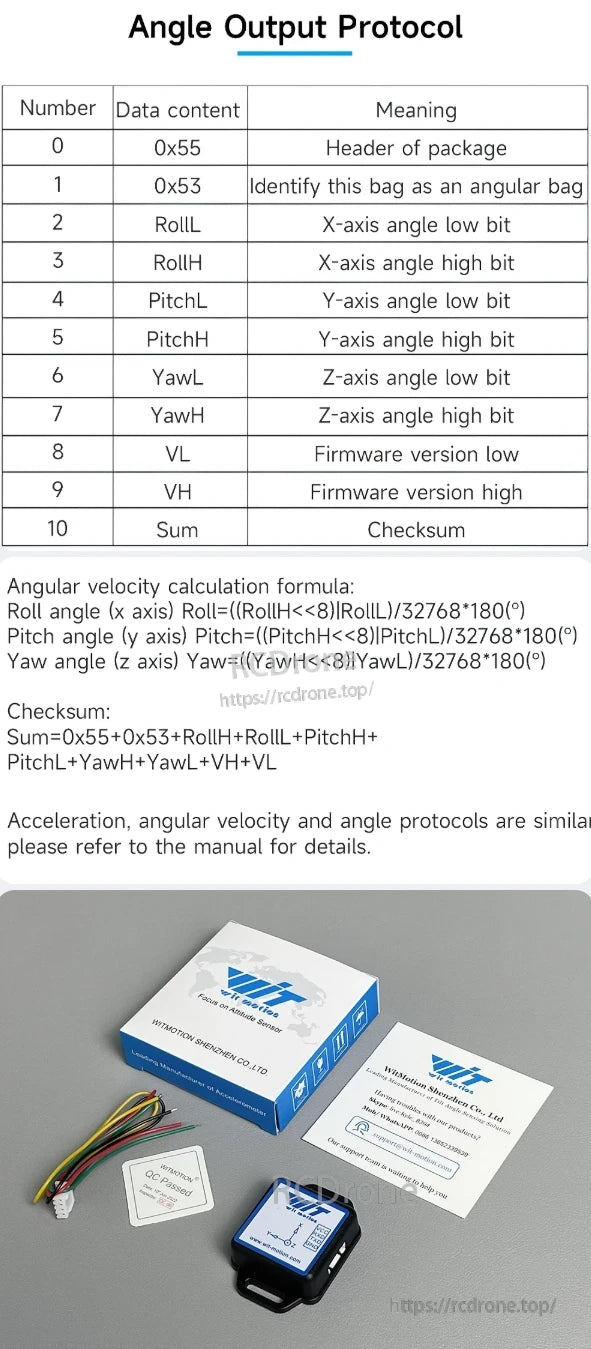
Sudut bingkai (0x55 0x53) – protokol output
| Indeks bait | Kandungan | Makna |
|---|---|---|
| 0 | 0x55 | Kepala paket |
| 1 | 0x53 | ID bingkai “Sudut” |
| 2–3 | RollL/RollH | Sudut paksi-X (rendah/tinggi) |
| 4–5 | PitchL/PitchH | Sudut paksi-Y (rendah/tinggi) |
| 6–7 | YawL/YawH | Sudut paksi-Z (rendah/tinggi) |
| 8 | VL | Versi firmware rendah |
| 9 | VH | Versi firmware tinggi |
| 10 | Jumlah | Checksum |
Penyahkodan sudut
Roll (°) = ((RollH << 8) | RollL) / 32768 × 180
Pitch (°) = ((PitchH << 8) | PitchL) / 32768 × 180
Yaw (°) = ((YawH << 8) | YawL) / 32768 × 180
Checksum
Jumlah = 0x55 + 0x53 + RollL + RollH + PitchL + PitchH + YawL + YawH + VL + VH.
( bingkai pecutan dan kelajuan sudut mengikuti gaya susun atur yang sama—lihat manual.)
Dimensi &dan Penyambung
Saiz penutup: 51 × 36 × 15 mm (T × L × D), dengan telinga pemasangan; berat ≈ 20 g.
Penyambung: XH2.54-4P (header papan pada sensor).
Penyambungan (versi TTL)
| Pint | Nama | Deskripsi |
|---|---|---|
| 1 | VCC | Input kuasa 3.3–5 V |
| 2 | TX | Pemasukan data bersiri, tahap TTL |
| 3 | RX | Keluaran data bersiri, tahap TTL |
| 4 | GND | Tanah |
Nota: Gunakan tahap TTL untuk integrasi MCU secara langsung. Varian RS232/RS485 menggunakan tahap voltan dan standard pendawaian masing-masing.
Perisian &dan alat
-
MiniIMU.exe (Windows): konfigurasi (algoritma, arah pemasangan, julat, lebar jalur), graf masa nyata, pandangan mentah/hex, rakaman data dan eksport TXT.
-
Demo 3D: visualisasikan orientasi dalam masa nyata (sumber tersedia).
-
Penyelarasan magnet visual: wizard pemadanan elips untuk menghapuskan bias (disyorkan untuk penggunaan pertama).
-
Pemandu &dan kod: pemandu CH340/CP2102; contoh untuk STM32, Arduino, C/C++, Matlab; aplikasi Android; video demo PC/telefon.
Aplikasi tipikal
Automasi dan robotik, platform penyeimbangan, pemantauan sudut condong, pemantauan getaran, elektronik pengguna, integrasi sistem IoT, ujian industri, headset VR/AR.
Butiran

IMU AHRS yang kos efektif dengan ketepatan 0.05° pada paksi X Y. Mempunyai ciri pengukuran kecenderungan, getaran, dan sikap menggunakan Algoritma Gabungan WitMotion. Termasuk fungsi pecutan, giroskop, sudut, magnet, penapisan Kalman, dan quaternion.
Sensor IMU WitMotion WT901C menawarkan pengukuran pecutan 3-paksi, giroskop, kelajuan sudut, dan pengesanan medan magnet. Ia menyokong antara muka TTL/RS232/RS485, mempunyai julat pecutan ±16g, giroskop ±2000°/s, ketepatan sudut statik 0.05°, dan beroperasi antara -40°C hingga 85°C.

Sensor IMU WitMotion WT901C menawarkan automasi, headset VR, penyeimbangan, dan pemantauan getaran. Aplikasi termasuk elektronik pengguna, integrasi IoT, ujian industri, dan AR/VR. Perisian percuma menyediakan pengukuran sikap yang mesra pengguna dengan data sudut masa nyata.
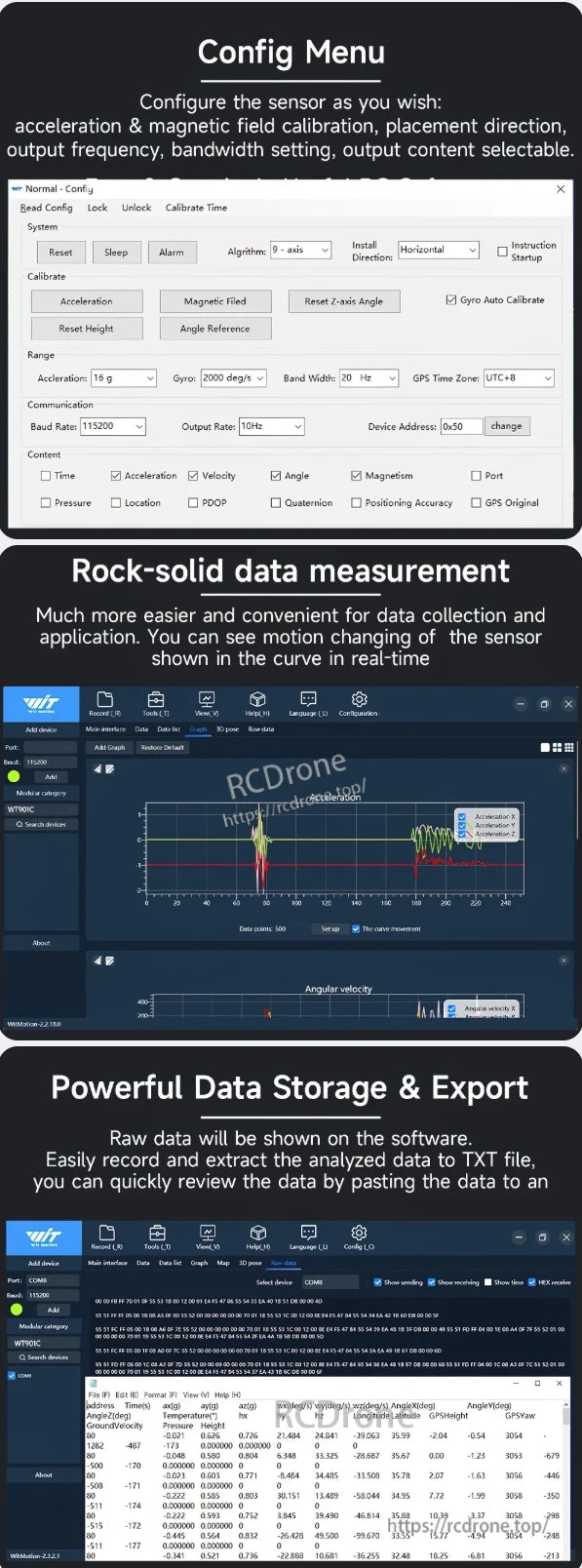
Sensor IMU WitMotion WT901C menawarkan tetapan boleh dikonfigurasi untuk pecutan, medan magnet, dan orientasi. Ia menyediakan visualisasi data masa nyata, pengukuran yang kukuh, dan menyokong penyimpanan/ekspor data dalam format TXT untuk analisis.
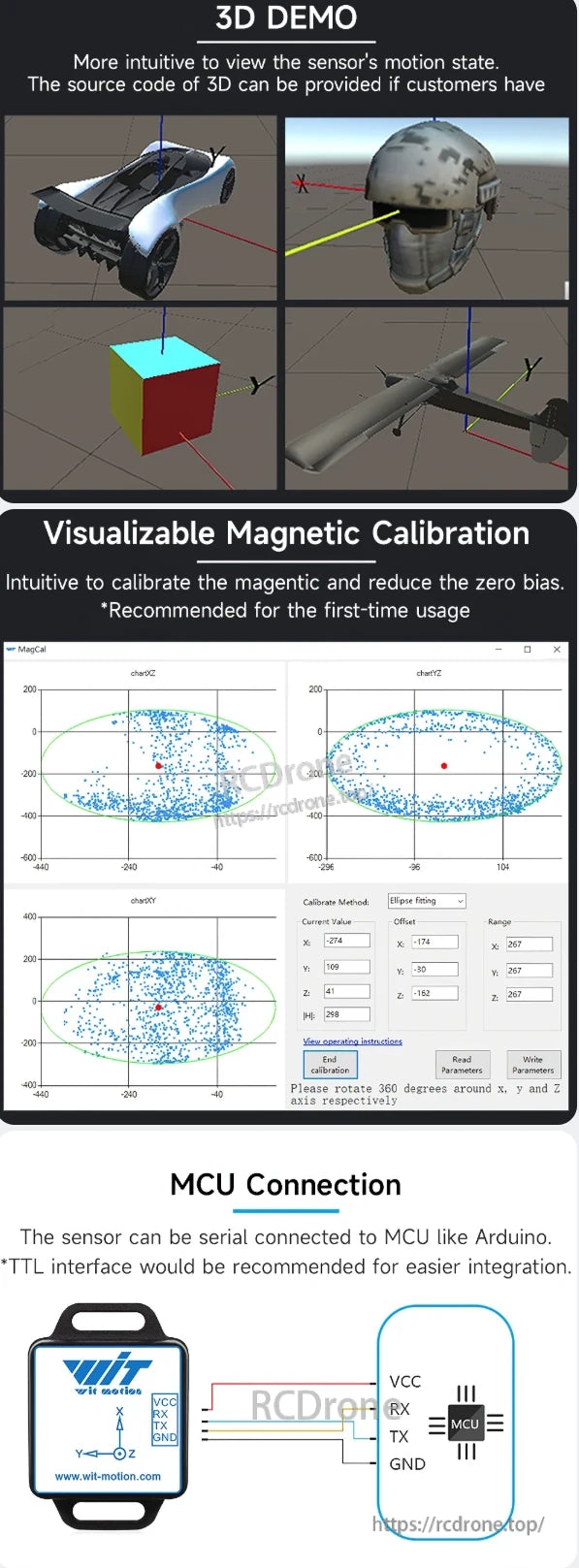
Demo 3D memvisualisasikan gerakan sensor dengan model kereta, helmet, kubus, dan drone. Antara muka kalibrasi magnetik membolehkan penyesuaian intuitif. Butiran sambungan MCU mempunyai antara muka TTL untuk Arduino, dengan pin VCC, RX, TX, GND yang dilabel.

Kit Pembangunan termasuk perisian Windows percuma, pemacu, manual, dan kod contoh untuk STM32, Arduino, C++, MATLAB. Menampilkan PDF, video demo, dan sokongan aplikasi Android untuk Sensor IMU WT901C.
Butiran protokol output sudut sensor IMU WT901C: struktur data, pengiraan sudut, formula checksum, pembungkusan. Menampilkan sudut roll, pitch, yaw, versi firmware, dan checksum.
Related Collections












