






WitMotion WTGAHRS1/2 10-Paksi GPS-IMU Akselerometer Giroskop Magnetometer Barometer AHRS, 0.2–200 Hz, UART/I²C, Navigasi BDS+GPS
WitMotion WTGAHRS1/2 10-Paksi GPS-IMU Akselerometer Giroskop Magnetometer Barometer AHRS, 0.2–200 Hz, UART/I²C, Navigasi BDS+GPS
WitMotion
Tidak dapat memuatkan ketersediaan pengambilan
Overview
WTGAHRS1/2 adalah modul AHRS/IMU yang dibantu GNSS yang menggabungkan akselerometer 3-paksi, giroskop 3-paksi, magnetometer 3-paksi, sudut Euler 3-paksi dan barometer dengan penentuan kedudukan BDS/GPS. Mereka memberikan sikap, arah, longitud/latitud, ketinggian dan kelajuan tanah yang stabil pada 0.2–200 Hz menggunakan penapisan Kalman. Ketepatan teras adalah X/Y 0.2° dan Z 1° (selepas kalibrasi, jauh dari gangguan magnet). Mereka menyediakan output UART-TTL dan I²C (400 kHz), perisian komputer atas Windows percuma, dan contoh yang kaya untuk STM32/Arduino/Windows/Matlab—ideal untuk UAV, UGV, robotik dan navigasi kenderaan.
Pemilihan model
| Model | Antenna | Bekalan | Arus | Kadar output | Ketepatan sudut |
|---|---|---|---|---|---|
| WTGAHRS1 | GNSS Luaran (BDS+GPS) | 3.3–5 V | < 50 mA | 0.2–200 Hz | X/Y 0.2°; Z 1° |
| WTGAHRS2 | GNSS Dalaman (BDS+GPS) | 3.3–5 V | < 40 mA | 0.2–200 Hz | X/Y 0.2°; Z 1° |
IMU & spesifikasi mekanikal (WTGAHRS1/2)
-
Saiz: 72.5 mm × 38 mm × 27 mm
-
Sensor: 3-paksi Acc; 3-paksi Gyro; 3-paksi Mag; 3-paksi Sudut; Barometer
-
Julat: Acc ±16 g; Gyro ±2000 °/s; Sudut ±180°
-
Ketepatan barometer: 1 Pa
-
Ralat pengukuran biasa: 1°
-
Antara muka: UART-TTL (baud 4,800–921,600), I²C (menyokong 400 kHz)
-
Kandungan output: masa, pecutan, kelajuan sudut, sudut Euler, medan magnet, tekanan, ketinggian, longitud, latitud, kelajuan tanah
-
Berat: WTGAHRS1 70.6 g; WTGAHRS2 62.4 g
Spesifikasi GNSS
-
Sistem/Band: BDS/GPS/GLONASS/GALILEO/QZSS/SBAS; Kod C/A 1.023 MHz
-
RF: tiga saluran penerimaan; S11/S22 SWR ≤ 1.3; 50 Ω ± 5%
-
Ketepatan mendatar: < 2.5 m (autonomi), < 2 m (SBAS) [CEP50%, 24 h statik, −130 dBm, ~6 satelit boleh digunakan]
-
Ketepatan kelajuan: < 0.1 m/s; Ketepatan arah: < 0.5°; Masa: 30 ns; Rujukan: WGS-84
-
Dinamika: ketinggian 50,000 m; kelajuan 50,000 m/s; pecutan ≤ 4 g
-
Kep灵敏an: penjejakan −162 dBm; pemerolehan −148 dBm
-
Masa mula: sejuk 35 s; panas 32 s; panas 1 s
-
1PPS: 0.25 Hz–1 kHz; Kemas kini kedudukan: 1–10 Hz (lalai 1 Hz)
-
Antara muka: UART/TTL
Perisian dan pembangunan
-
Perisian komputer atas Windows: log data, model 3D, plot lengkung, papan pemuka, konfigurasi modul
-
Contoh kod/sumber: demo STM32 UART, perpustakaan Arduino, demo 8051, contoh Windows C/C# dan Matlab, APP Android
-
Pengujian pendawaian cepat (USB-TTL): GND–GND, VCC–5 V, TX–RX, RX–TX
Aplikasi tipikal
UAV/UGV AHRS, robotik dan navigasi AGV/AMR, penentuan kedudukan dan pengukuran kelajuan/sikap kenderaan, pengesan antena/solar, penstabilan platform, pendidikan dan penyelidikan algoritma.
Apa yang termasuk
-
Sensor WTGAHRS1 atau WTGAHRS2 (mengikut pilihan)
-
Antenna GNSS (versi antena luaran WTGAHRS1)
-
Panduan pengguna dan pautan muat turun untuk perisian PC dan contoh
Nota pembeli
-
Ketepatan paksi-Z/arah bergantung kepada kalibrasi dan persekitaran magnet.
-
Pilih WTGAHRS1 apabila anda memerlukan antena GNSS luaran; pilih WTGAHRS2 untuk binaan kompak dengan antena dalaman.
Butiran

WitMotion modul WTGAHRS1 AHRS+GPS termasuk akselerometer 3-paksi, giroskop, magnetometer, barometer, dan GPS. Menyediakan data sikap, arah, dan kedudukan yang tepat tinggi untuk robotik dan navigasi.

WitMotion WTGAHRS1, modul AHRS 10-paksi dengan cip ICM-42605 dan AK8963.Ciri-ciri 3-paksi akselerometer, giroskop, magnetometer, GPS, dan antara muka TTL. Menyokong 3.3-5V, <50mA arus, 4800-921600 kadar baud, dan julat giroskop ±250-2000 deg/s.
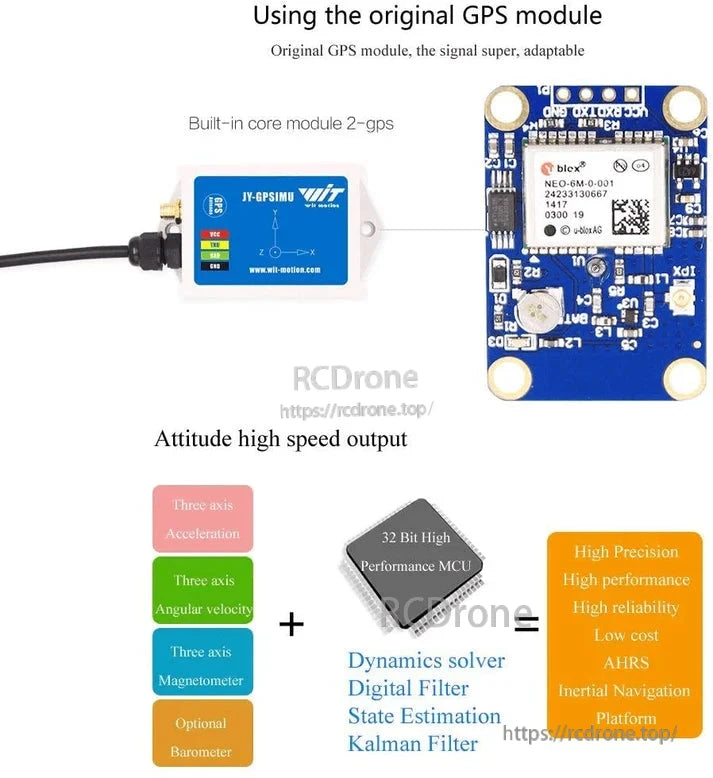
WitMotion WTGAHRS10-Axis AHRS termasuk GPS, output sikap berkelajuan tinggi, MCU 32-bit, dan sensor terintegrasi. Menggabungkan pecutan, kelajuan sudut, magnetometer, barometer pilihan dengan penapis digital dan Kalman untuk navigasi inersia yang boleh dipercayai dan kos rendah.


WitMotion JY-GPSIMU 10-Axis AHRS dengan warna wayar yang dilabel

Related Collections






