Yahboom Transbot SE Kereta Robot ROS dengan Lengan 3DOF & 2MP PTZ, untuk Jetson Nano B01 / Raspberry Pi 5
Yahboom Transbot SE Kereta Robot ROS dengan Lengan 3DOF & 2MP PTZ, untuk Jetson Nano B01 / Raspberry Pi 5
Yahboom
Tidak dapat memuatkan ketersediaan pengambilan
Gambaran Keseluruhan
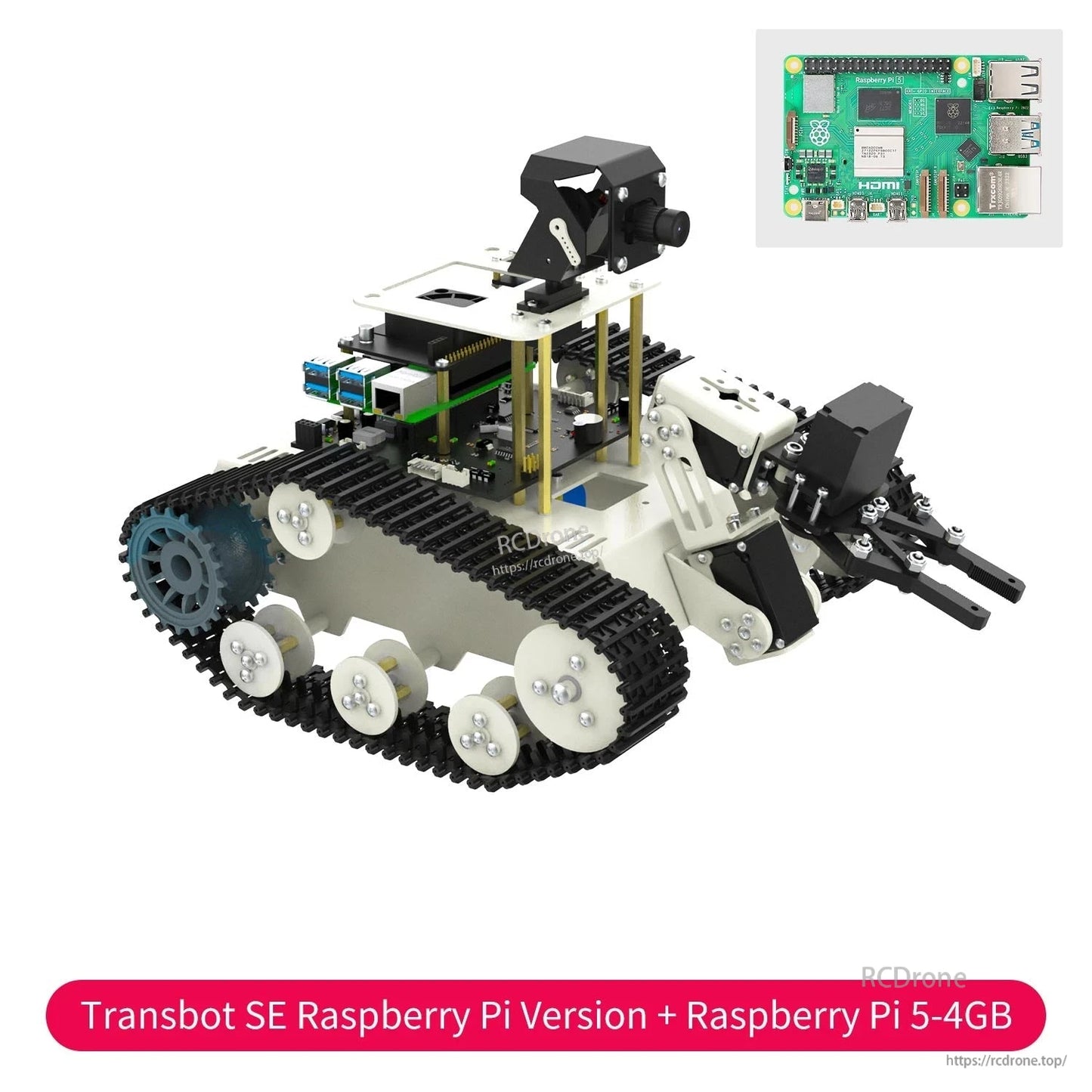
Transbot SE adalah Kereta Robot ROS (platform perayap berjejak) yang direka untuk pembangunan visi AI dan robotik dengan Jetson Nano B01 atau Raspberry Pi 5. Ia menggunakan badan aloi aluminium sepenuhnya dan mengintegrasikan lengan robotik 3DOF serta kamera PTZ 2DOF untuk kawalan berasaskan visi, penjejakan, dan simulasi lengan robot dengan MoveIt.
Perlukan bantuan memilih versi (dengan/tanpa Jetson Nano atau Raspberry Pi) atau menyediakan persekitaran perisian? Hubungi sokongan melalui https://rcdrone.top/ atau emel [email protected].
Ciri-ciri Utama
- Casis perayap berjejak dengan struktur trek berbeza untuk pemanduan luar jalan
- Badan aloi aluminium sepenuhnya
- Lengan robotik 3DOF (servo bas bersiri pintar) untuk mencengkam/pengendalian dan aliran kerja simulasi
- Kamera PTZ 2DOF dengan kamera 2MP (putaran mendatar/menegak)
- Motor pengekod 520
- Tumpukan visi AI terbina dalam: Pemprosesan imej OpenCV, pembelajaran mesin MediaPipe, pengenalan objek YOLO, dan rangka kerja pembelajaran mendalam AI
- Kawalan interkoneksi pilihan ditunjukkan: Aplikasi kawalan jauh, kawalan pengaturcaraan web Jupyter, kawalan sistem ROS, kawalan interkoneksi merentas platform, kawalan pembentukan pelbagai kenderaan
- Pengaturcaraan: Pengaturcaraan Python dan pengaturcaraan C++ ditunjukkan
Fungsi Kawalan & AI Vision (Ditunjukkan)
- Pemprosesan imej OpenCV: Pengesanan Objek (mengenali kategori objek tertentu), AR Vision (12 kesan dipaparkan melalui kertas papan catur), Kod QR AR (menjana dan mengenali kod QR AR), Pengenalan wajah (latihan autonomi dan pengenalan masa nyata melalui pengumpulan imej wajah masa nyata)
- Permainan visual AI: Penjejakan Warna, Penjejakan Objek (kamera PTZ menjejaki objek secara masa nyata), Pengendalian lengan robotik (pengendalian berdasarkan arahan kod QR), Autopilot (pemilihan warna tersuai; mengikuti laluan warna yang dikenali)
- Kawalan lengan robotik MoveIt: algoritma kinematik hadapan/songsang, perancangan laluan Cartesian, pengesanan perlanggaran, simulasi MoveIt
- Kawalan pengiktirafan isyarat (MediaPipe): pergerakan casis dikawal tapak tangan, kumpulan tindakan lengan robotik dikawal isyarat, pergerakan casis dikawal isyarat, kawalan sikap lengan (lengan robotik meniru postur lengan dan buka/tutup tapak tangan)
- Pembangunan MediaPipe: pengiktirafan isyarat, pengiktirafan wajah, pengiktirafan objek 3D (contoh yang ditunjukkan: “KASUT”, “KERUSI”, “CANGKIR”, “KAMERA”, dll.)
- Contoh pembelajaran mendalam ditunjukkan: Pengenalan KNN bagi digit tulisan tangan; Pengenalan objek YOLO (pengenalan objek tersuai melalui latihan set data tersuai menggunakan algoritma YOLOv5)
Spesifikasi
| Jenis robot | Kereta Robot ROS perayap berjejak |
| Papan utama yang serasi (dinyatakan) | Jetson Nano B01; Raspberry Pi 5 |
| Bahan casis / badan | Aloi aluminium (badan aloi aluminium sepenuhnya dinyatakan) |
| Lengan robotik | Lengan robotik 3DOF (servo bas bersiri pintar) |
| Kamera & pan/tilt | PTZ kamera 2DOF; Kamera 2MP |
| Motor pemacu | Motor 520 dengan pengekod (motor pengekod 520 dinyatakan) |
| Bateri (ditunjukkan) | Bateri Litium: 12V 4400mAh |
| Pengecas (ditunjukkan) | 12.6V 2A pengecas |
Pilihan Versi (Ditunjukkan)
- Versi Jetson Nano: Dengan Jetson Nano 4GB (versi SUB) / Tanpa Jetson Nano
- Versi Raspberry Pi: Dengan Raspberry Pi 5-4GB / Tanpa Raspberry Pi (memerlukan Raspberry Pi dengan RAM 4GB atau lebih)
Aplikasi
- Pembelajaran ROS dan pembangunan kawalan gerakan robot
- Projek penglihatan komputer (OpenCV), pengenalan isyarat (MediaPipe), dan pengenalan objek (YOLO)
- Simulasi lengan robot dan eksperimen perancangan dengan MoveIt (kinematik, perancangan Cartesian, pengesanan perlanggaran)
- Kawalan jauh dan demonstrasi kawalan pengaturcaraan berasaskan web (kawalan APP, Jupyter, kawalan sistem ROS)
Tutorial & Sumber Pembelajaran
Pautan tutorial:http://www.yahboom.net/study/Transbot-SE
Katalog Kursus (Ditunjukkan)
- Pengenalan Transbot SE: Mengenai Transbot SE; Langkah berjaga-jaga untuk penggunaan dan keselamatan bateri; Percubaan Pertama
- Percubaan Pertama: Konfigurasi rangkaian WiFi; Kawalan APP; Kawalan pemegang tanpa wayar USB; Kawalan video pemegang
- Kursus kawalan perkakasan: Mengenai papan pengembangan dan kemas kini firmware; Tutup proses permulaan sendiri; Pasang perpustakaan Transbot SE; Kawal buzzer dan butang; Kawal servo PWM; Kawal servo bas; Kawal motor; Kawal pergerakan robot
- Konfigurasi sistem operasi Linux: Pemasangan dan penggunaan mesin maya; Asas Linux; Kawalan jauh; Konfigurasi komunikasi berbilang mesin; IP statik dan mod hotspot; Pemantauan masa nyata laman web; Tutorial pengembangan; Tulis imej sistem
- Docker penggunaan: Gambaran keseluruhan Docker dan pemasangan docker; Perintah biasa untuk kontena imej docker; Memahami dan menerbitkan imej Docker secara mendalam; Interaksi perkakasan Docker dan pemprosesan data; Mulakan kontena Dobot
- Kursus Asas ROS: Pengenalan ROS; Struktur fail projek; Perintah dan alat biasa; Penerbit; Pelanggan; Sesuaikan mesej topik dan penggunaan; Klien; Pelayan; Mesej perkhidmatan tersuai dan penggunaan; Pelepasan dan pemantauan TF
- Kursus OpenCV: Memulakan dengan CV Sumber Terbuka; Transformasi geometri CV Sumber Terbuka; Pemprosesan imej CV Sumber Terbuka dan melukis segmen garis teks; Pengindahan imej CV Sumber Terbuka; Visi AR; Kod QR AR; Asas ROS+Opencv; Aplikasi ROS+Opencv; Pembangunan MediaPipe
- Kursus robot ROS: Algoritma PID; Komunikasi asas; Kawalan papan kekunci; Kawalan pemegang; Anggaran keadaan robot; Penentukuran data
- Kursus kamera mudah ROS: Kalibrasi kamera HD; Penjejakan warna kamera HD; Penjejakan warna kamera HD (casis); Penjejakan objek kamera HD; Penjejakan sasaran KCF; Penjejakan wajah kamera HD; Kamera HD membawa lengan robotik; Autopilot kamera HD
- Tutorial kawalan lengan robotik ROS: Konfigurasi MoveIt; Kawalan MoveIt pada mesin sebenar; MoveIt bergerak secara rawak; Reka bentuk kinematik MoveIt; Laluan kartesian MoveIt; Pengelakan MoveIt; Reka bentuk pemandangan MoveIt; Perancangan trajektori MoveIt
- Kawalan multi-robot ROS: Kawalan multi-robot; Prestasi barisan multi-robot; Lengan robot menari multi-robot
- Kursus kawalan MoveIt lengan robotik ROS: Konfigurasi MoveIt; MoveIt mengawal mesin sebenar; MoveIt bergerak secara rawak; Reka bentuk kinematik MoveIt; Laluan kartesian MoveIt; Mengelak MoveIt; Reka bentuk pemandangan MoveIt; Perancangan trajektori MoveIt; Kereta kawalan tapak tangan Mediapie; Lengan robotik kawalan isyarat Mediapipe; Kereta kawalan isyarat Mediapipe; Kawalan sikap lengan Mediapipe
- Kursus pembelajaran mendalam: KNN mengenali digit tulisan tangan; Penggunaan asas TensorFlow; Penggunaan asas PyTorch (jetson); Latihan model yolov5 (jetson); Pecutan yolov5+tensorrt (jetson); yolov4-tiny
Butiran
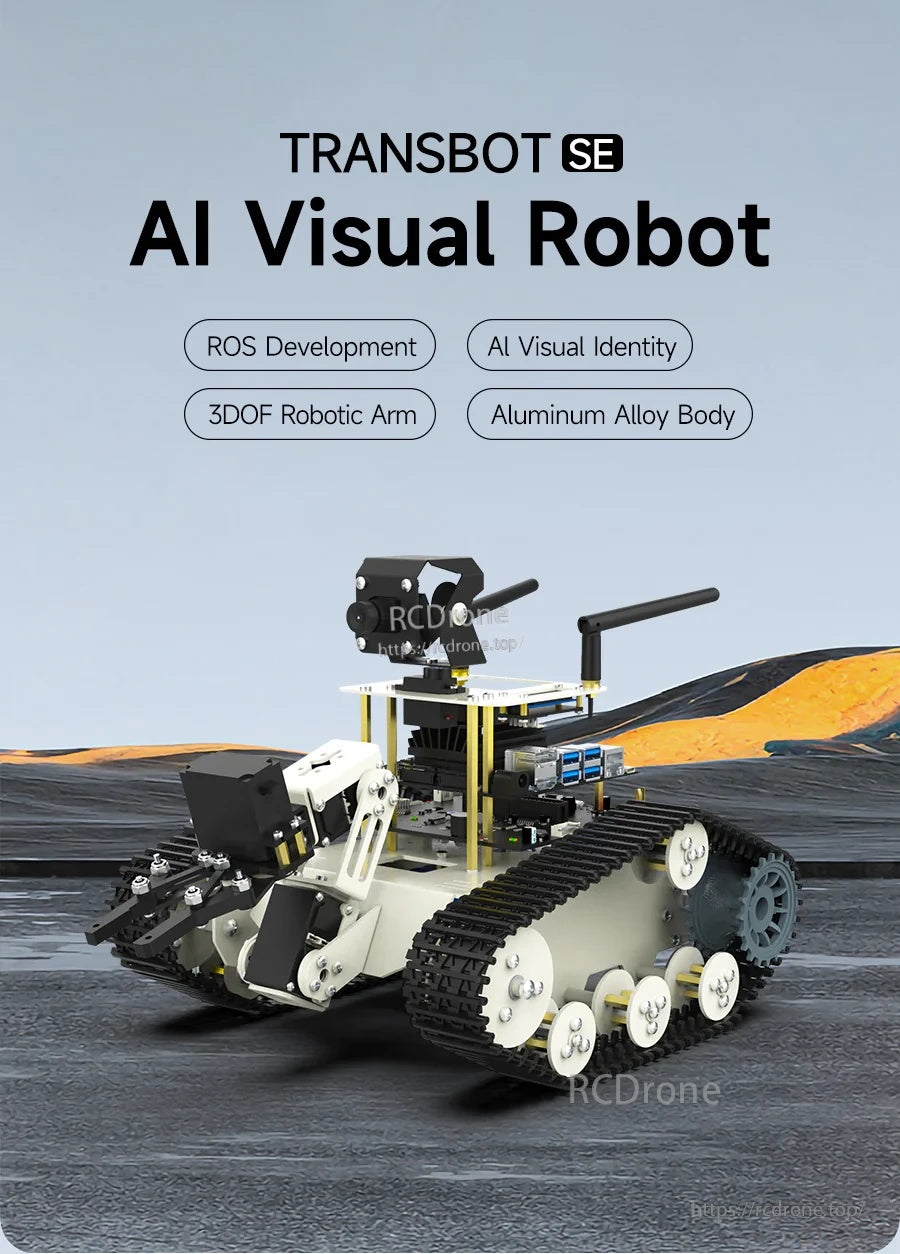
Transbot SE adalah platform robot ROS berjejak yang dibina untuk projek visi AI, menampilkan badan semua logam, lengan 3DOF, dan gimbal kamera 2DOF.

Satu set perisian lengkap menyokong visi OpenCV, kawalan isyarat MediaPipe, pengiktirafan YOLO, dan simulasi lengan robotik berasaskan MoveIt.

Casis crawler yang dijejaki dan pemacu pembezaan direka untuk pergerakan stabil di permukaan dalaman dan luaran yang pelbagai.
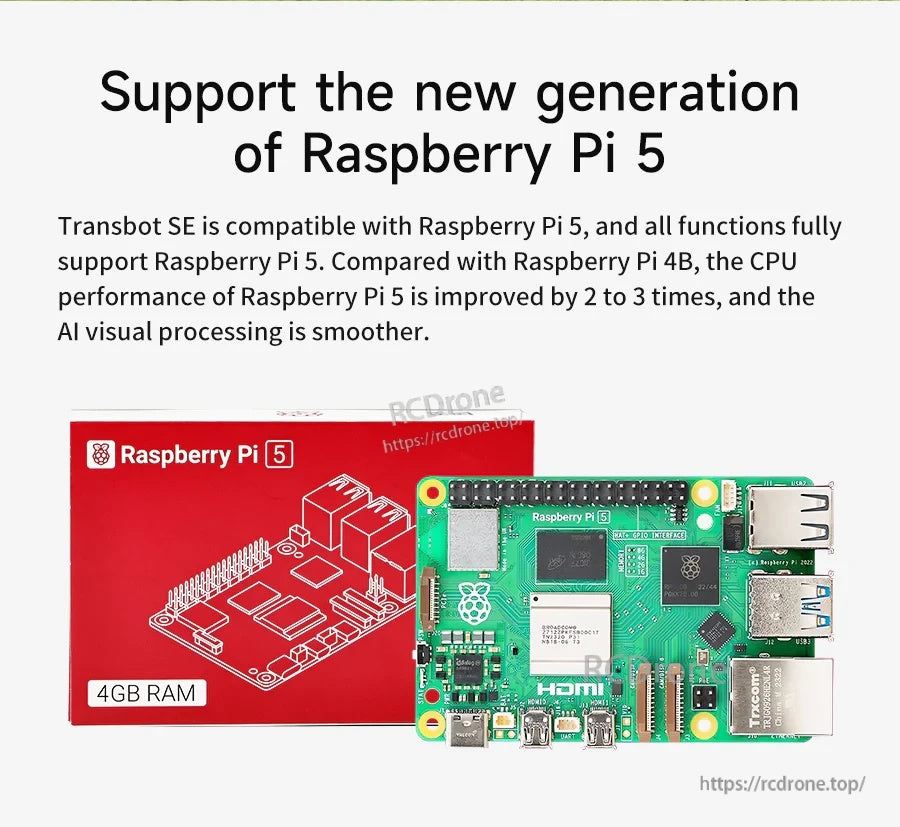
Serasi dengan Raspberry Pi 5 untuk pembangunan ROS dan pemprosesan visi atas papan yang lebih lancar.
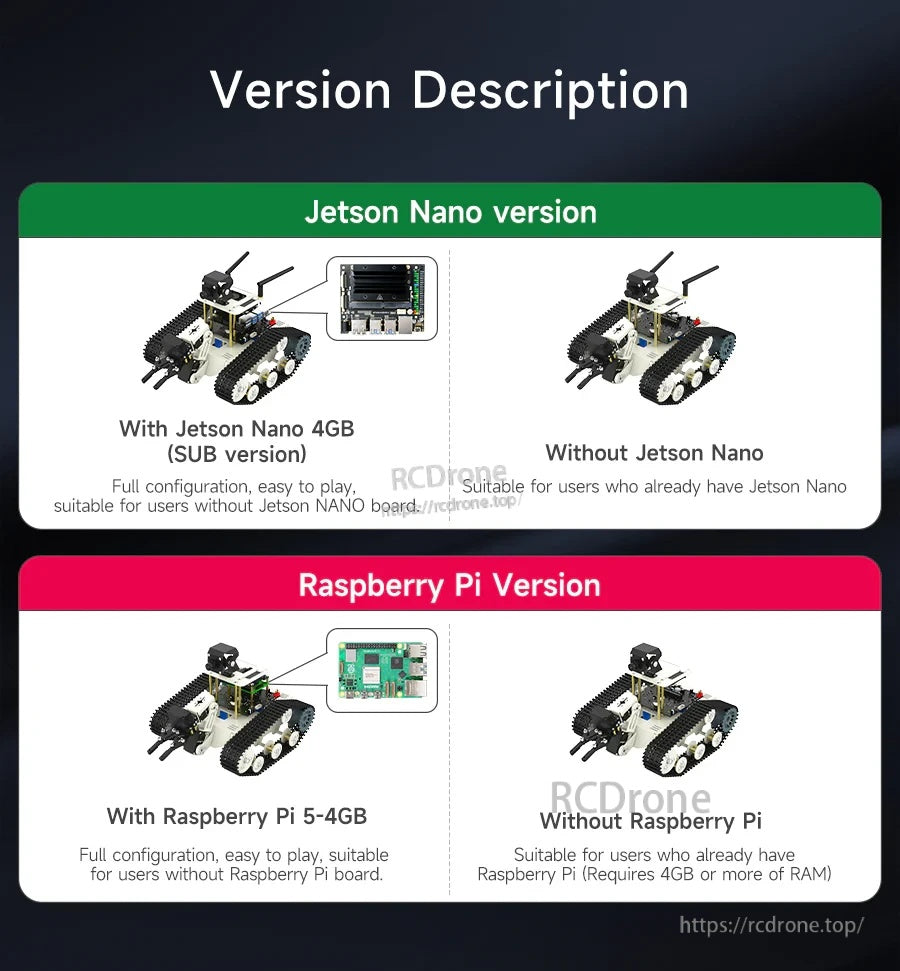
Pilih kit dengan Jetson Nano atau Raspberry Pi disertakan, atau versi tanpa papan jika anda sudah mempunyai pengawal anda sendiri.
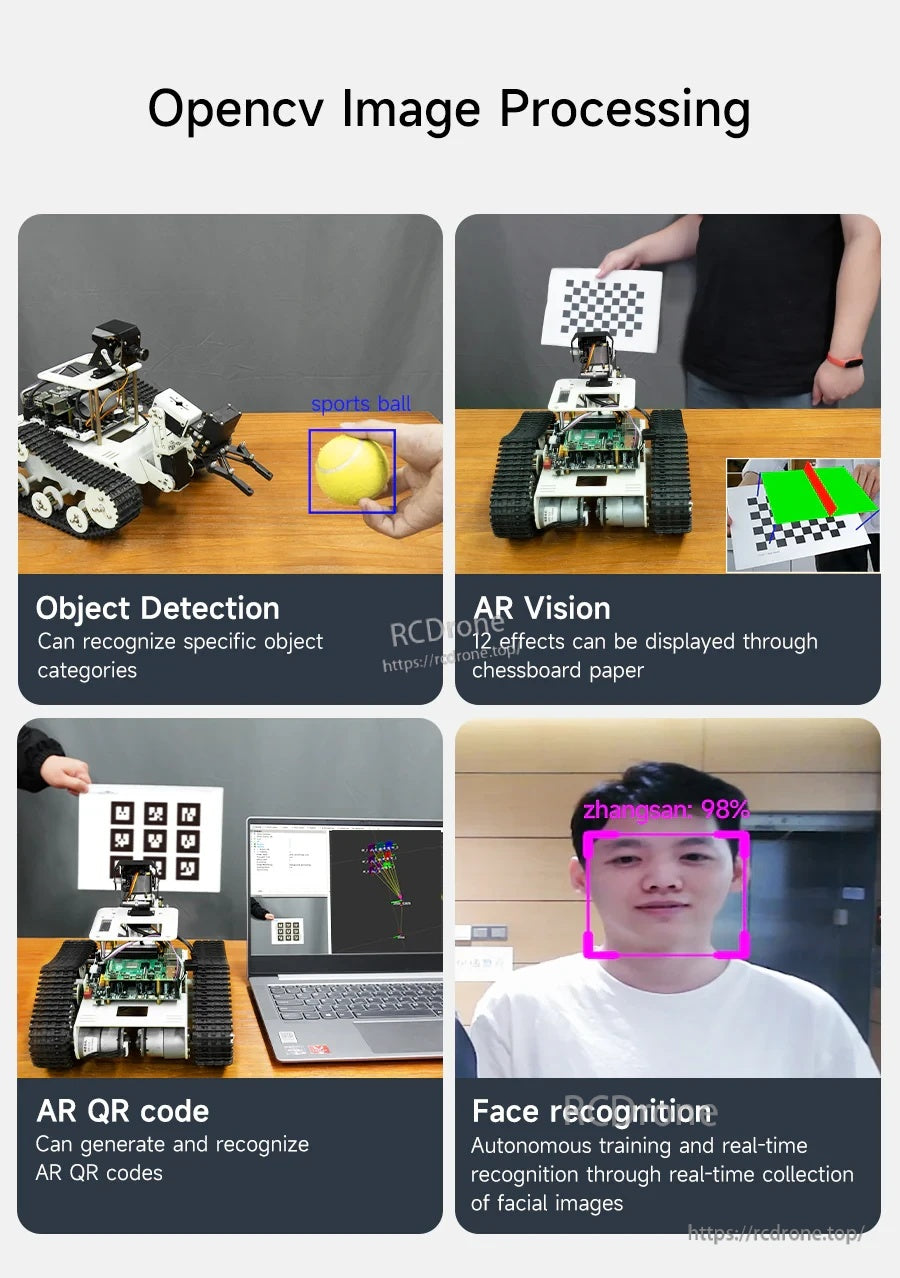
Demo OpenCV terbina dalam termasuk pengesanan objek, kesan AR dengan papan penanda, dan aliran kerja penjanaan/pengiktirafan kod QR.
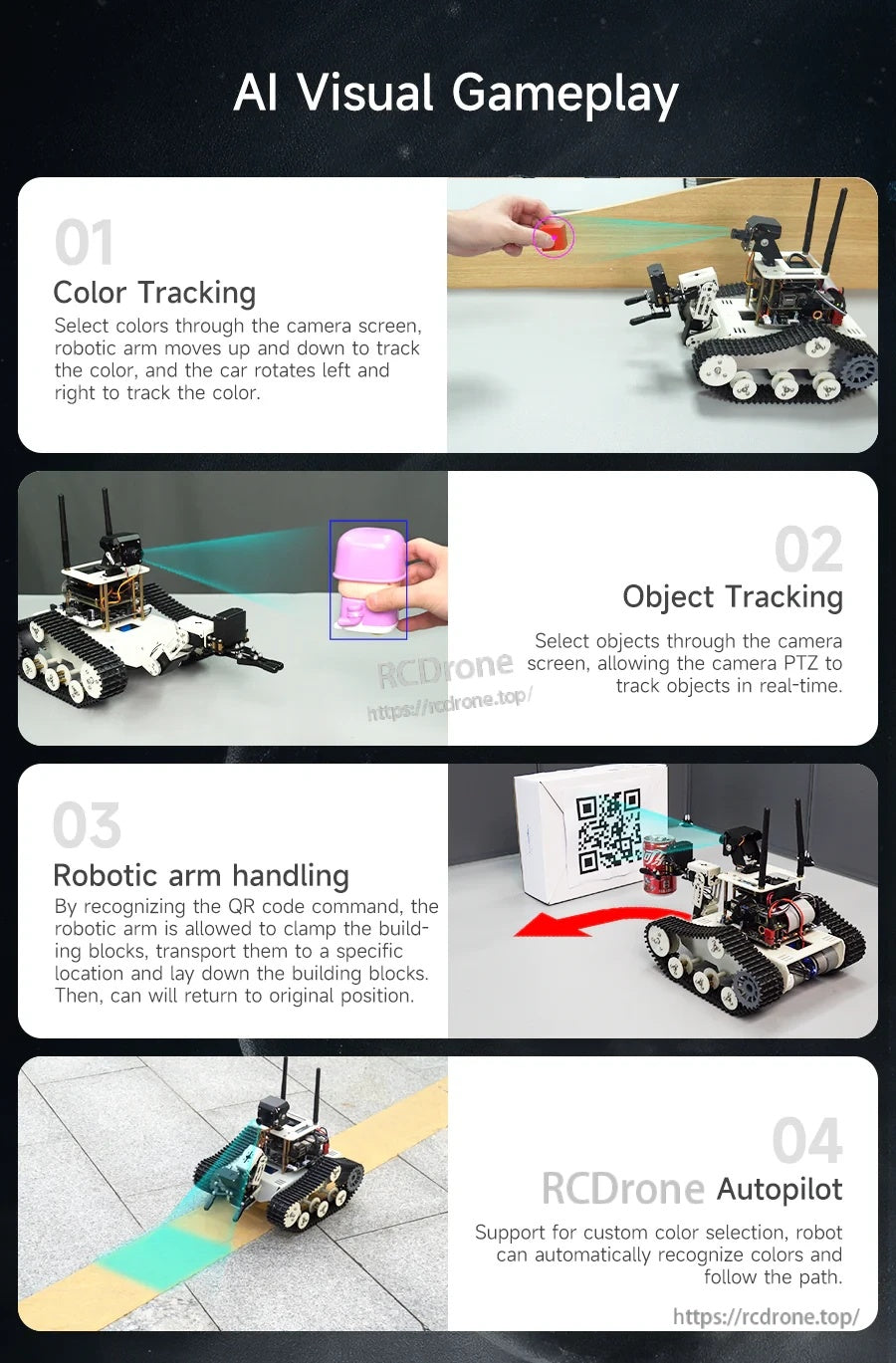
Permainan visual AI menambah penjejakan warna, penjejakan objek berasaskan PTZ, perintah QR pick-and-place, dan autopilot laluan warna.
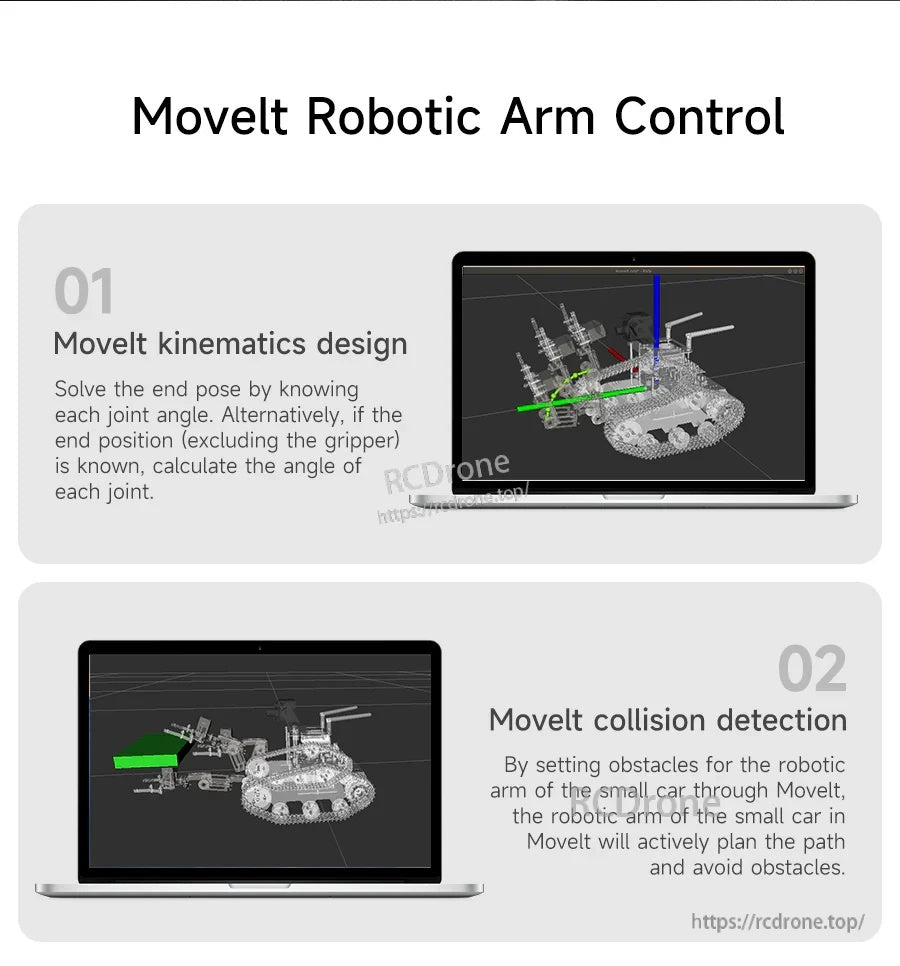
Penyepaduan MoveIt menyokong kinematik, perancangan Cartesian, dan pemeriksaan perlanggaran untuk pembangunan dan simulasi lengan robotik.
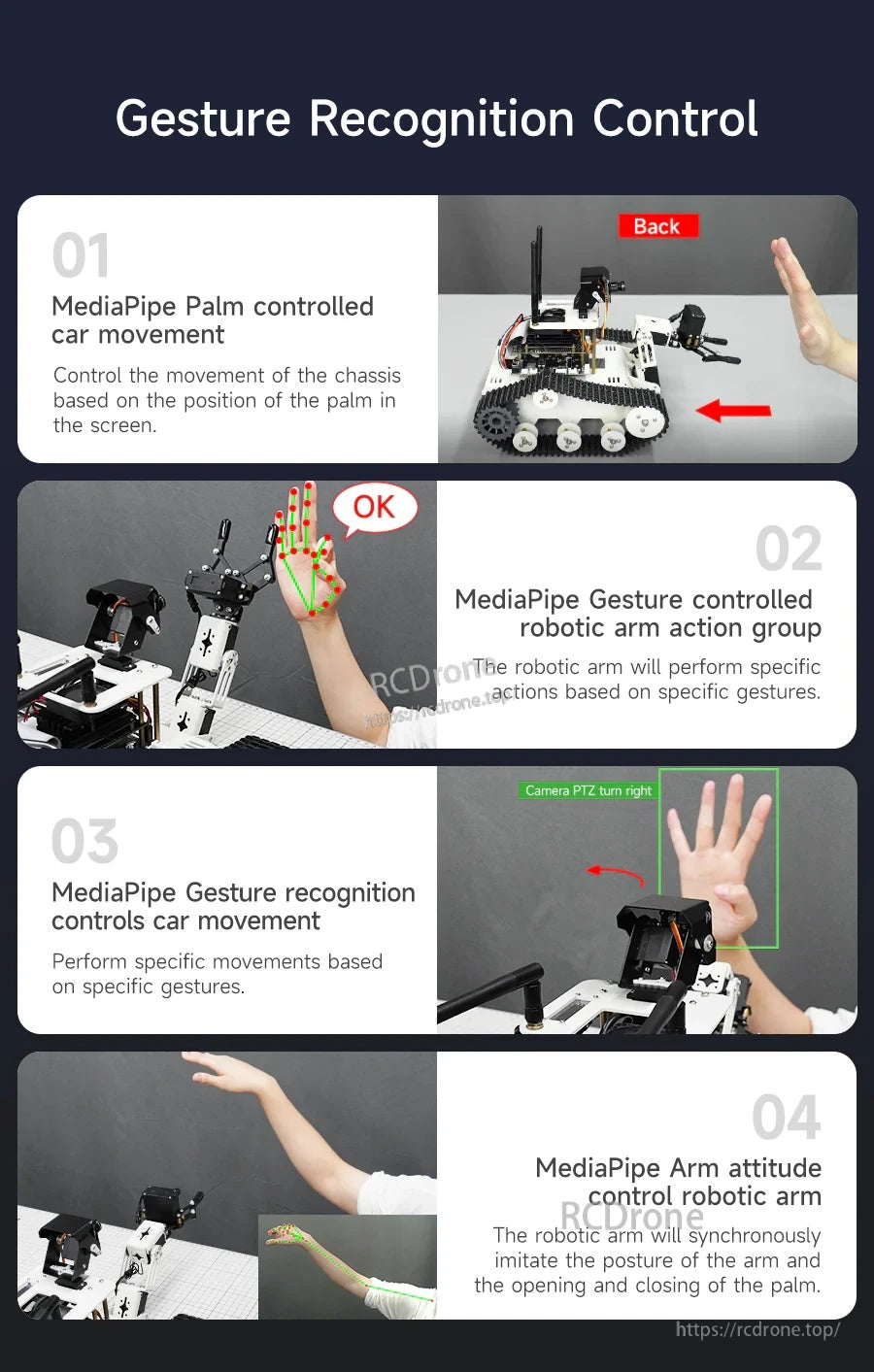
Kawalan isyarat MediaPipe membolehkan pergerakan yang dikendalikan oleh tapak tangan serta kumpulan tindakan lengan robotik yang dicetuskan oleh isyarat dan peniruan postur.
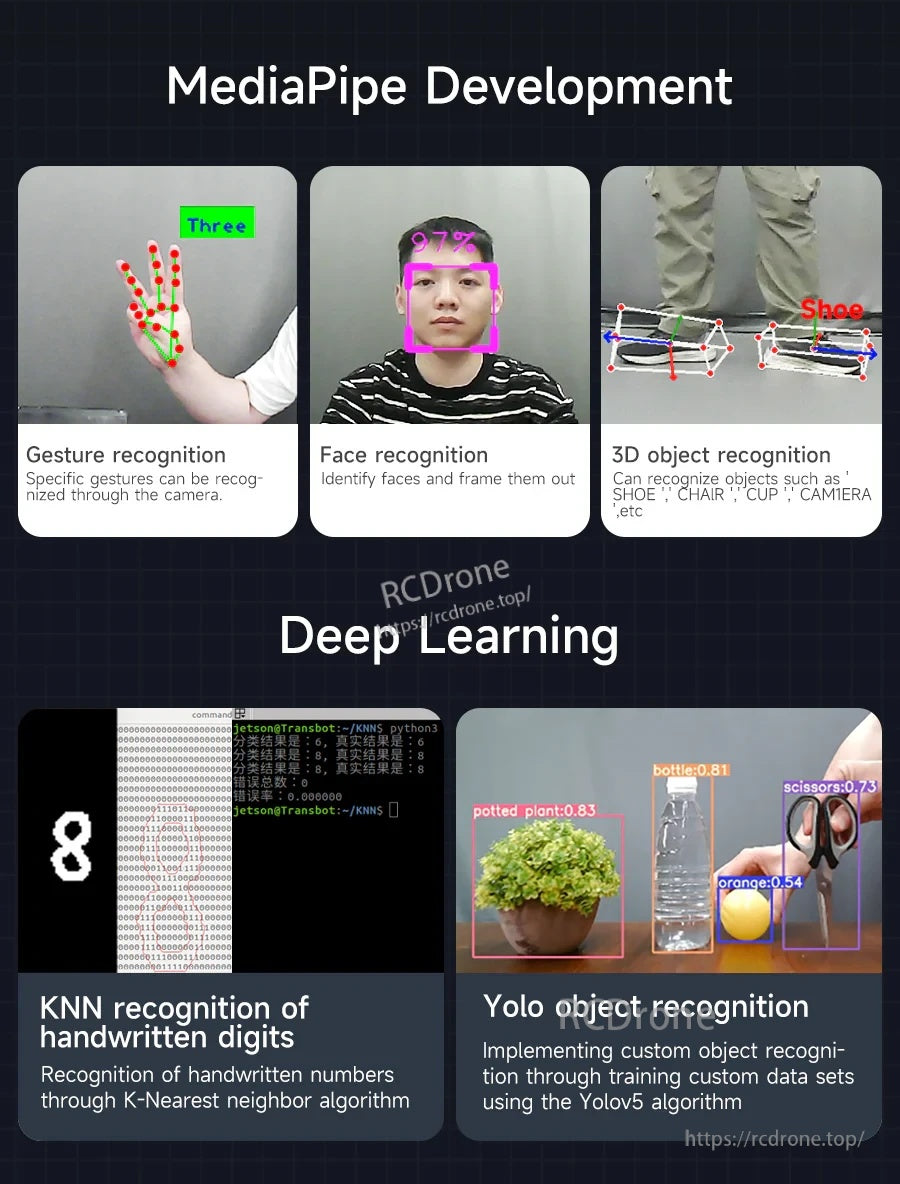
Projek sampel termasuk pengenalan isyarat/muka, label objek 3D, pengenalan digit KNN, dan contoh latihan set data YOLO.

Gunakan aplikasi kawalan jauh untuk pemanduan cepat, ciri kamera, dan mod AI interaktif tanpa persediaan desktop penuh.

Pelbagai laluan kawalan disokong, termasuk pengaturcaraan web Jupyter, kawalan sistem ROS, dan sambungan antara platform.
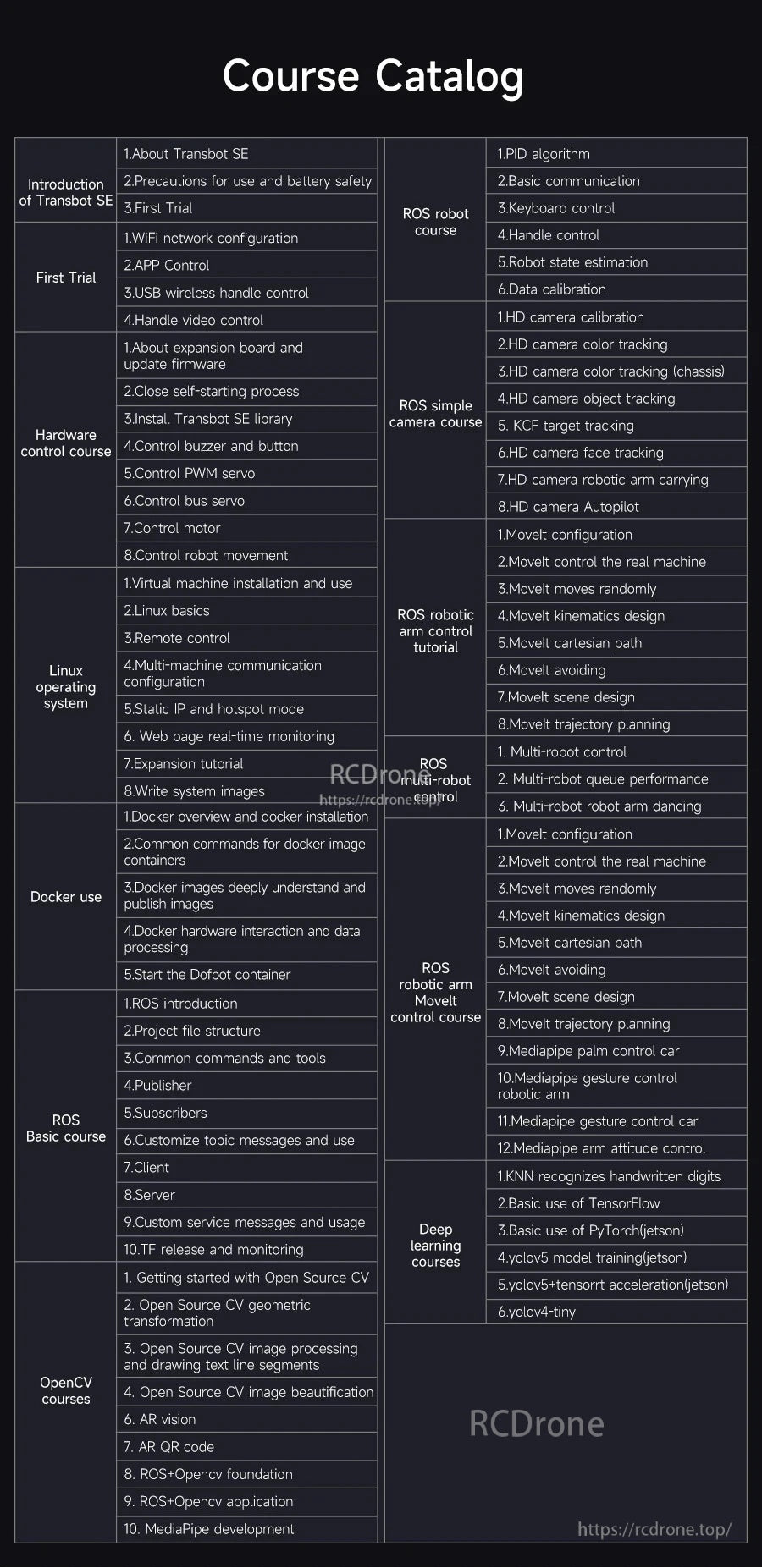
Katalog kursus berstruktur membimbing persediaan, asas ROS, ciri penglihatan, dan topik kawalan lanjutan.

Sumber tutorial tersedia dalam talian untuk membantu membina persekitaran perisian dan memulakan demo ROS dan penglihatan dengan lebih cepat.

Sorotan perkakasan termasuk kamera PTZ 2DOF, lengan bas bersiri 3DOF, motor pengekod, dan papan kawalan utama ROS pilihan.
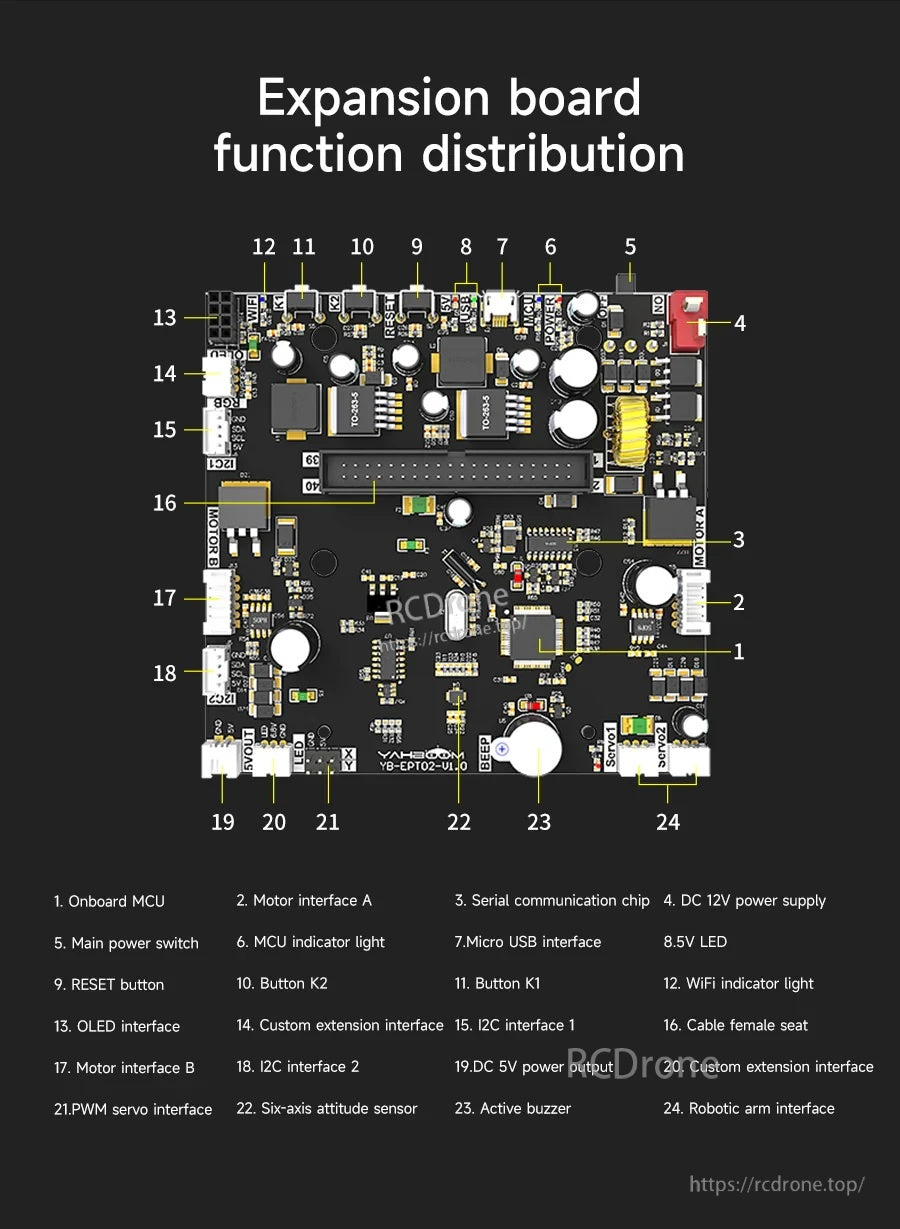
Papan pengembangan breakout memudahkan pendawaian untuk motor, peranti bersiri, periferal USB, dan sensor biasa.
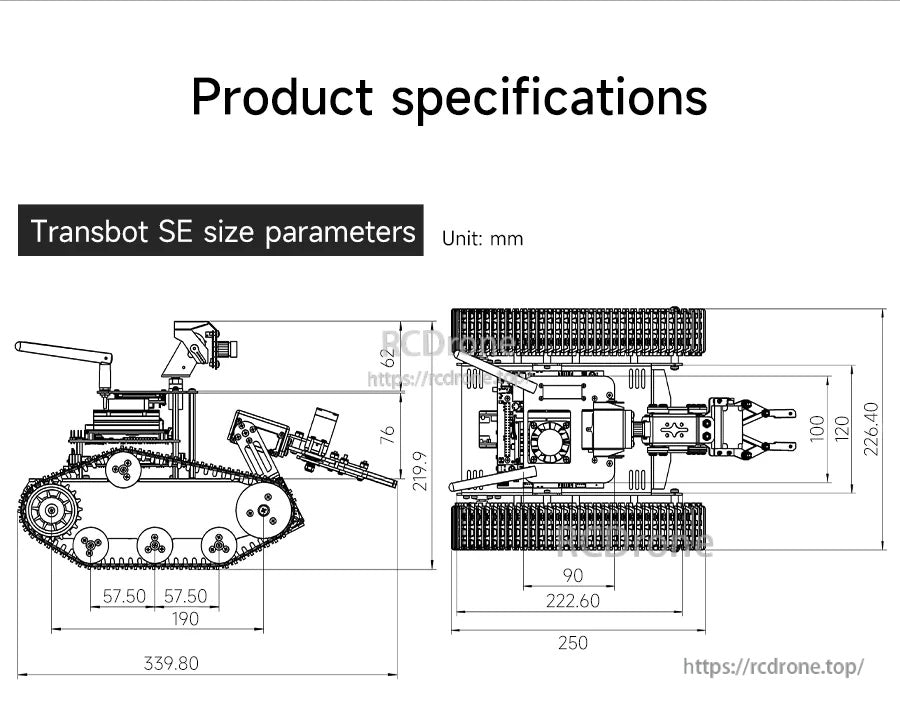
Dimensi terperinci membantu merancang ruang pemasangan, susun atur makmal, dan integrasi aksesori.
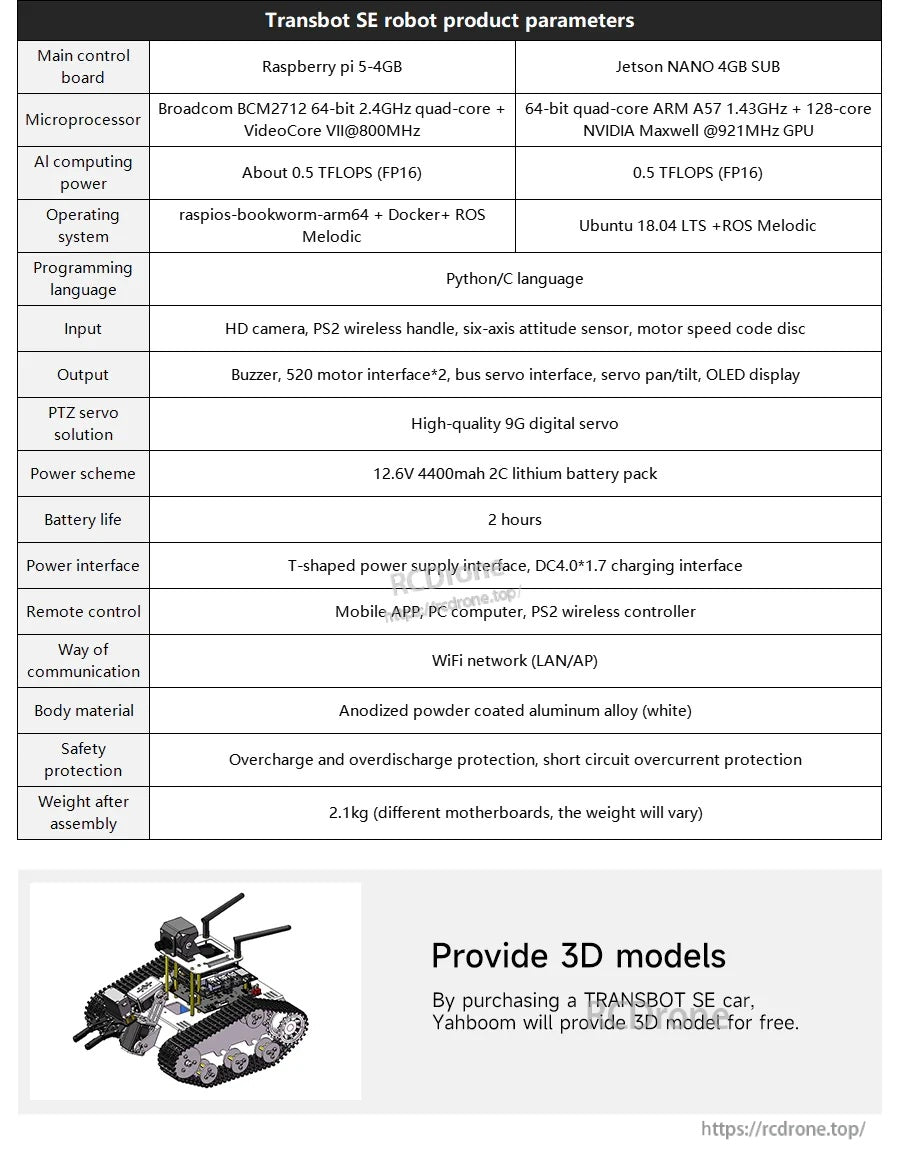
Jadual parameter lengkap membandingkan pilihan pengawal dan meringkaskan kuasa, antara muka, sistem operasi, dan butiran pemasangan.
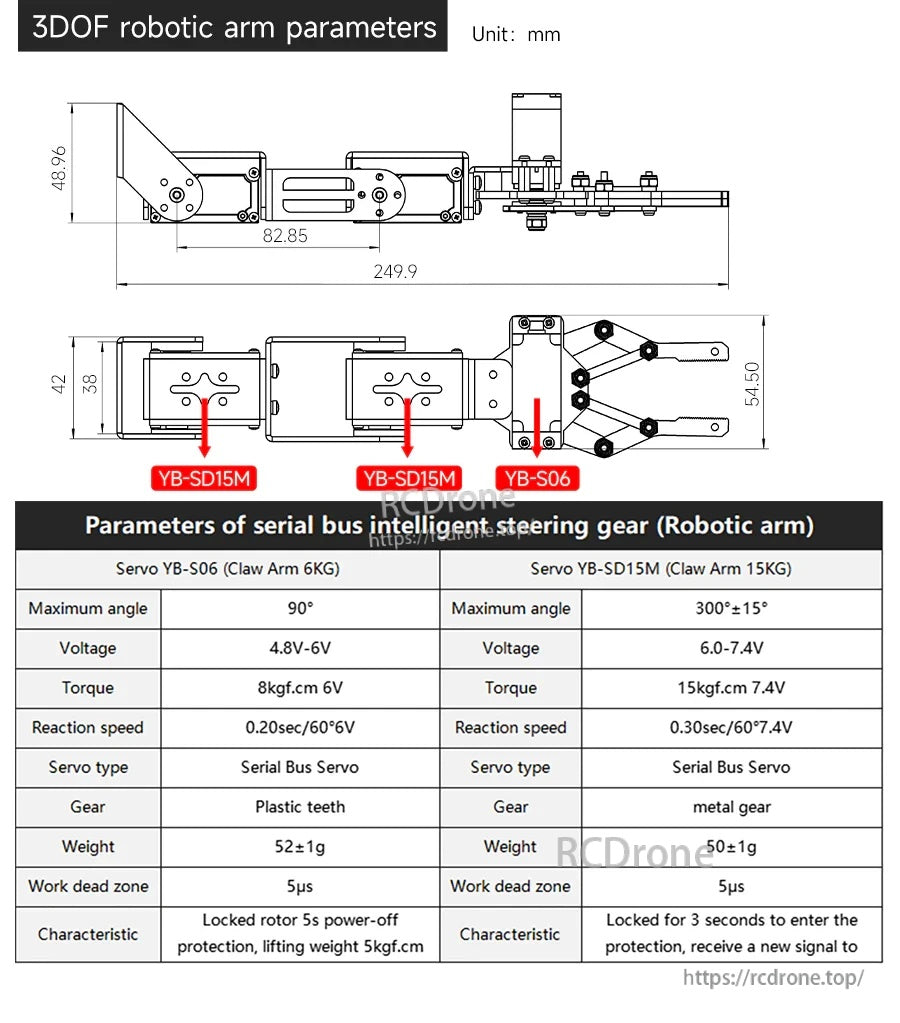
Dimensi lengan robotik 3DOF dan parameter servo utama (sambungan YB-SD15M dan cakar YB-S06) membantu dengan perancangan susun atur dan pemilihan kuasa.
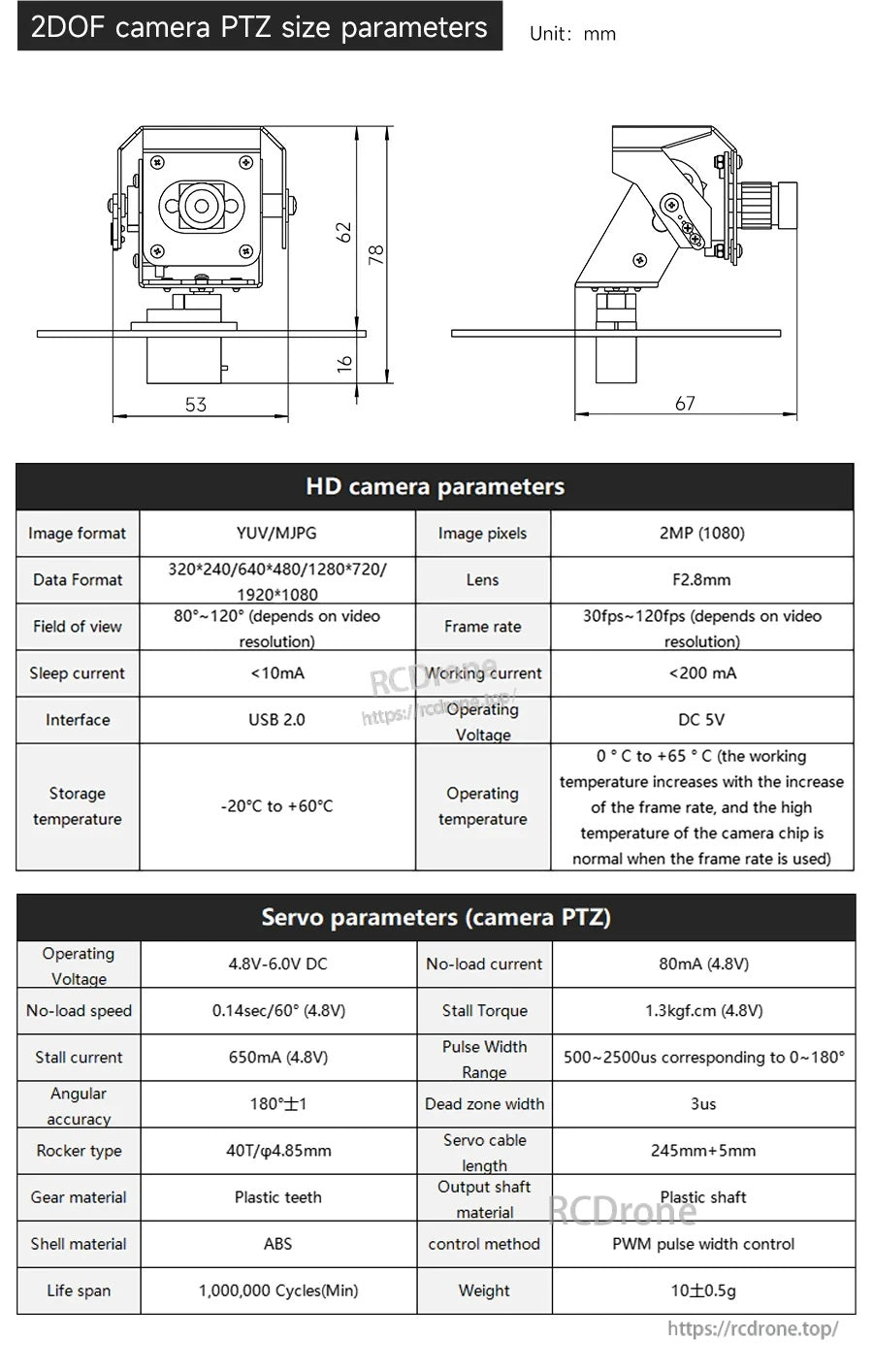
Modul kamera PTZ 2DOF termasuk kamera 2MP 1080p USB 2.0 dan pemasangan padat dengan dimensi berlabel dalam milimeter untuk integrasi yang lebih mudah.
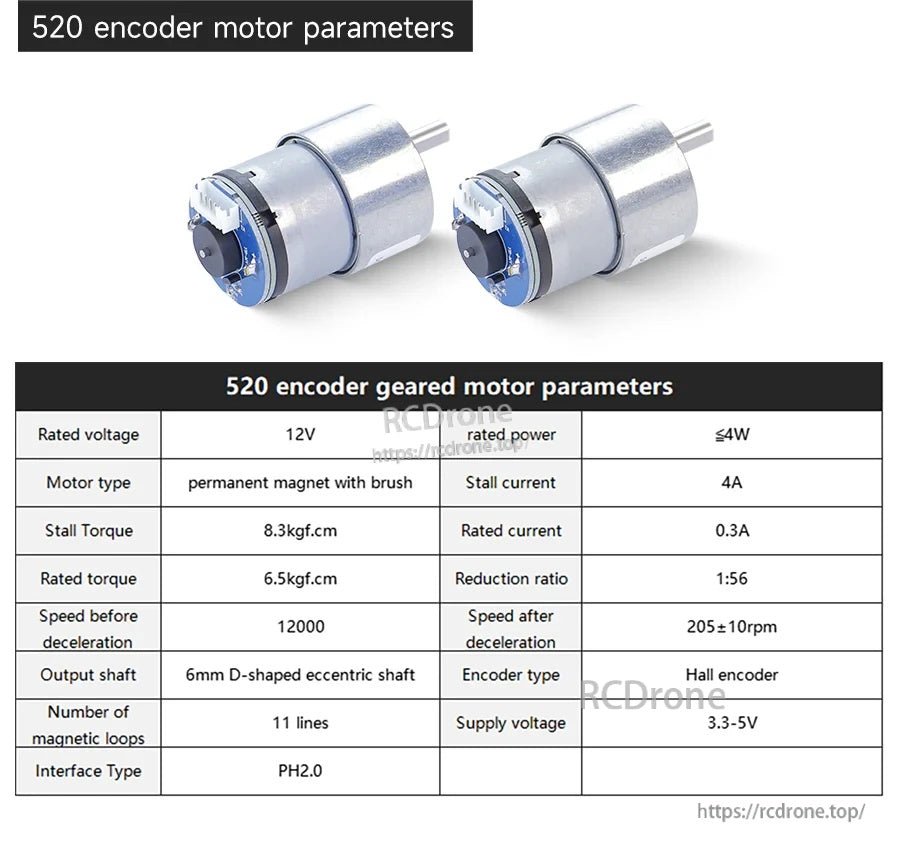
Motor bergear pengekod 520 menggunakan reka bentuk berus 12V dengan nisbah pengurangan 1:56 dan pengekod Hall (3.3–5V), dinilai pada 205±10 rpm selepas pengurangan.
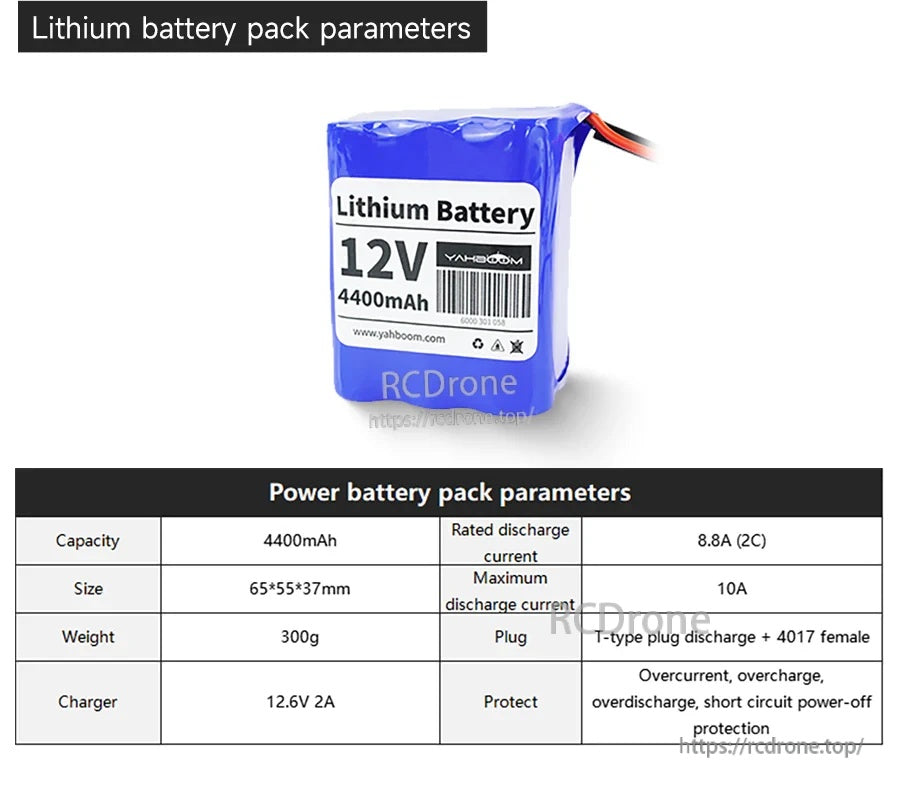
Pek bateri litium 12V 4400mAh menggunakan palam pelepasan jenis T dan menyenaraikan arus pelepasan dinilai 8.8A dan maksimum 10A.

Kit robot Yahboom Transbot SE ROS termasuk rangka dan plat atas, trek dan roda, lengan robotik 3DOF, PTZ kamera 2DOF, motor, bateri, pengecas, dan kabel.
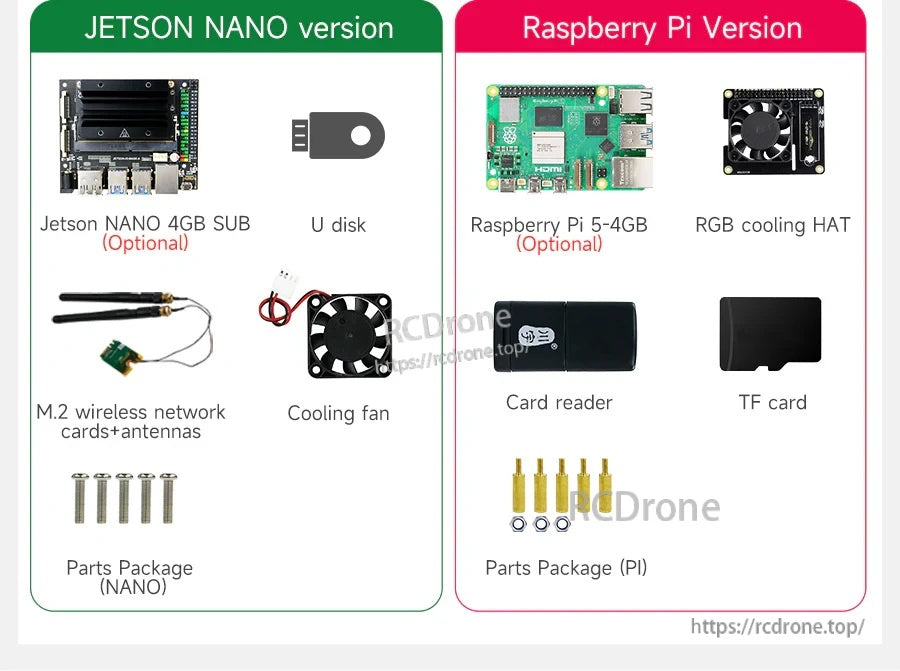
Pakej bahagian robot Transbot SE ROS termasuk pilihan Jetson Nano atau Raspberry Pi dengan aksesori seperti kipas penyejuk, antena, dan storan TF.
Related Collections