Pengawal Pemegang Tanpa Wayar Tiga Mod Yahboom untuk Robotik, Berwayar/Bluetooth/2.4G, Kesan Hall, ROS
Pengawal Pemegang Tanpa Wayar Tiga Mod Yahboom untuk Robotik, Berwayar/Bluetooth/2.4G, Kesan Hall, ROS
Yahboom
Tidak dapat memuatkan ketersediaan pengambilan
Overview
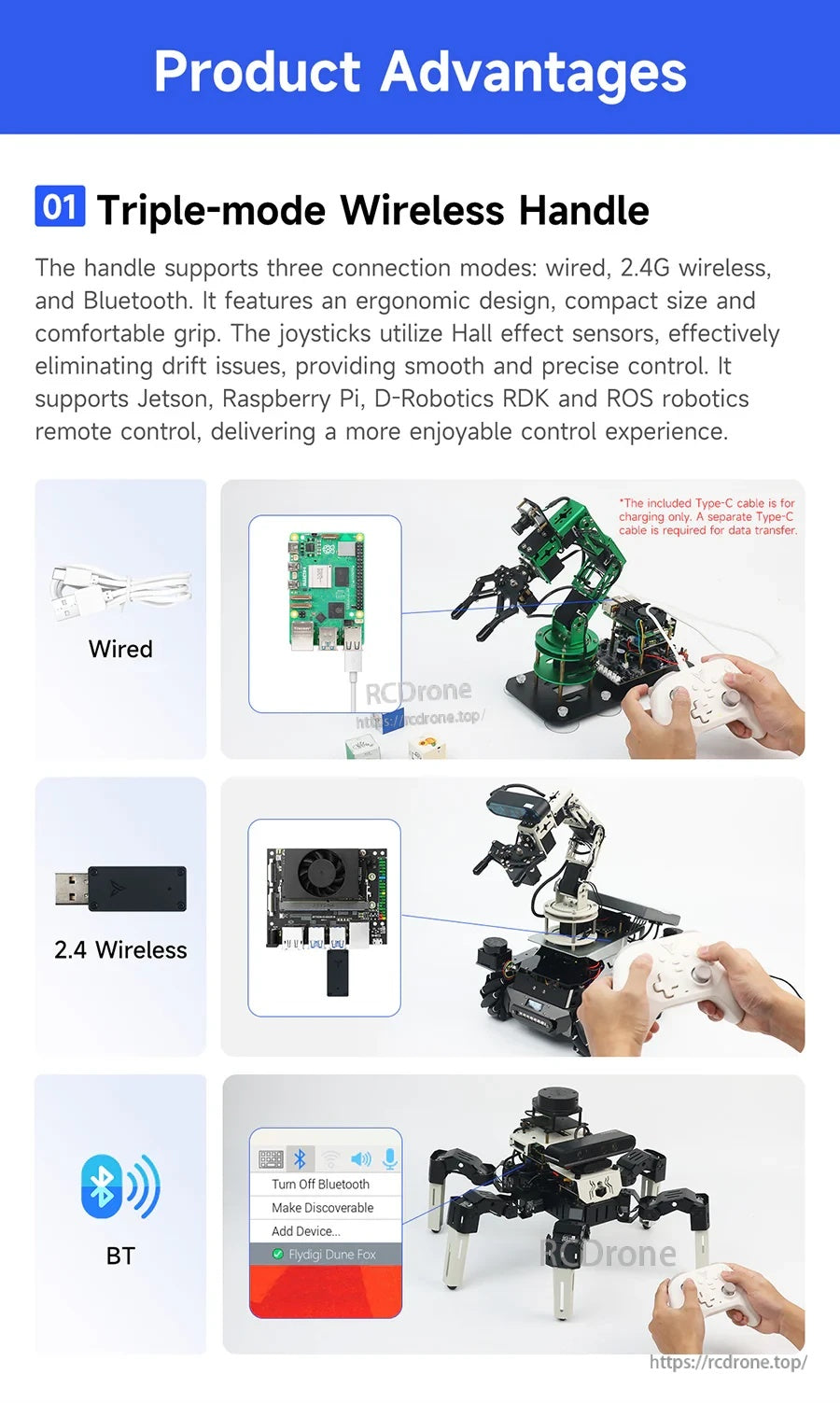
Yahboom Triple-mode Wireless Handle adalah pengawal untuk pembangunan robotik dan kawalan pelbagai platform. Ia menyokong tiga mod sambungan (berwayar, Bluetooth, dan tanpa wayar 2.4G), dan direka untuk digunakan dengan platform seperti Jetson, Raspberry Pi, D-Robotics RDK, dan robotik berasaskan ROS, serta PC, Switch, dan peranti mudah alih. Ia mempunyai joystick kesan Hall dan pemicu kesan Hall untuk kawalan yang lancar tanpa drift, serta motor getaran asimetrik terbina dalam untuk maklum balas haptik.
Ciri Utama
- Sambungan tiga mod: Berwayar, Bluetooth (BT), dan tanpa wayar 2.4G (dengan penerima).
- Joystick kesan Hall: Operasi tanpa drift; induksi elektromagnet kesan Hall; poros POM yang sangat tahan lama.
- Pemicu kesan Hall: Lebih lancar dan lebih tepat daripada pemicu filem karbon.
- Kontrol: 15 butang; 6 saluran analog; menyokong nilai output analog 6-saluran.
- Maklum balas haptik: Motor getaran asimetrik terbina dalam (maklum balas getaran).
- Ergonomik: Permukaan melengkung ergonomik; pegangan & yang selesa; tekstur yang licin/lembut.
- Rasa butang: Reka bentuk mekanikal 3-peringkat ABXY; tekan yang jelas; butang bahu melengkung pelbagai & pemicu untuk menekan dengan lebih mudah pada sudut yang berbeza.
- Nota ketahanan: Jangka hayat joystick 5 juta (dinyatakan).
- Sambungan USB: Sambungan stabil dan latensi kawalan jauh yang rendah (dinyatakan).
- Sumber terbuka: Menyediakan sumber terbuka; termasuk tutorial penyesuaian kod pengawal ROS (dinyatakan).
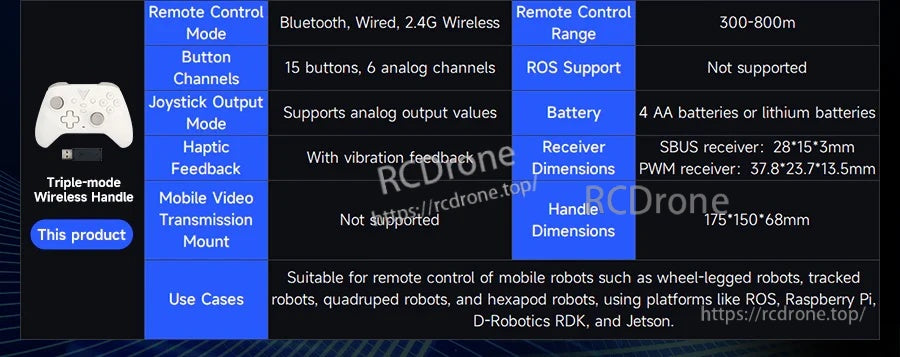
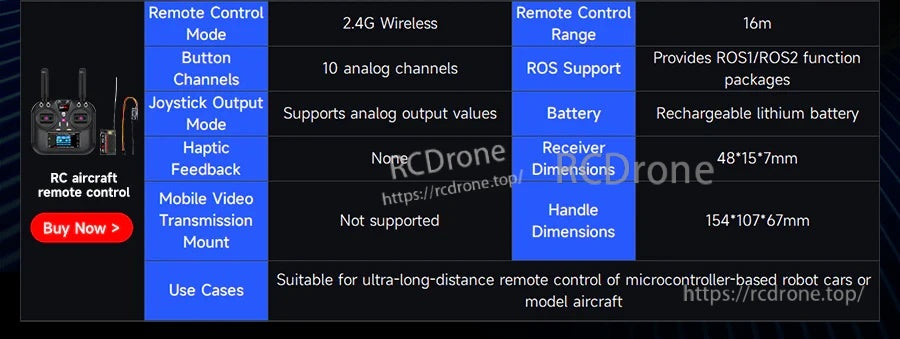
Spesifikasi
| Mod kawalan jauh | Bluetooth, Berwayar, 2.4G Tanpa Wayar |
| Jarak kawalan jauh | 300–800 m |
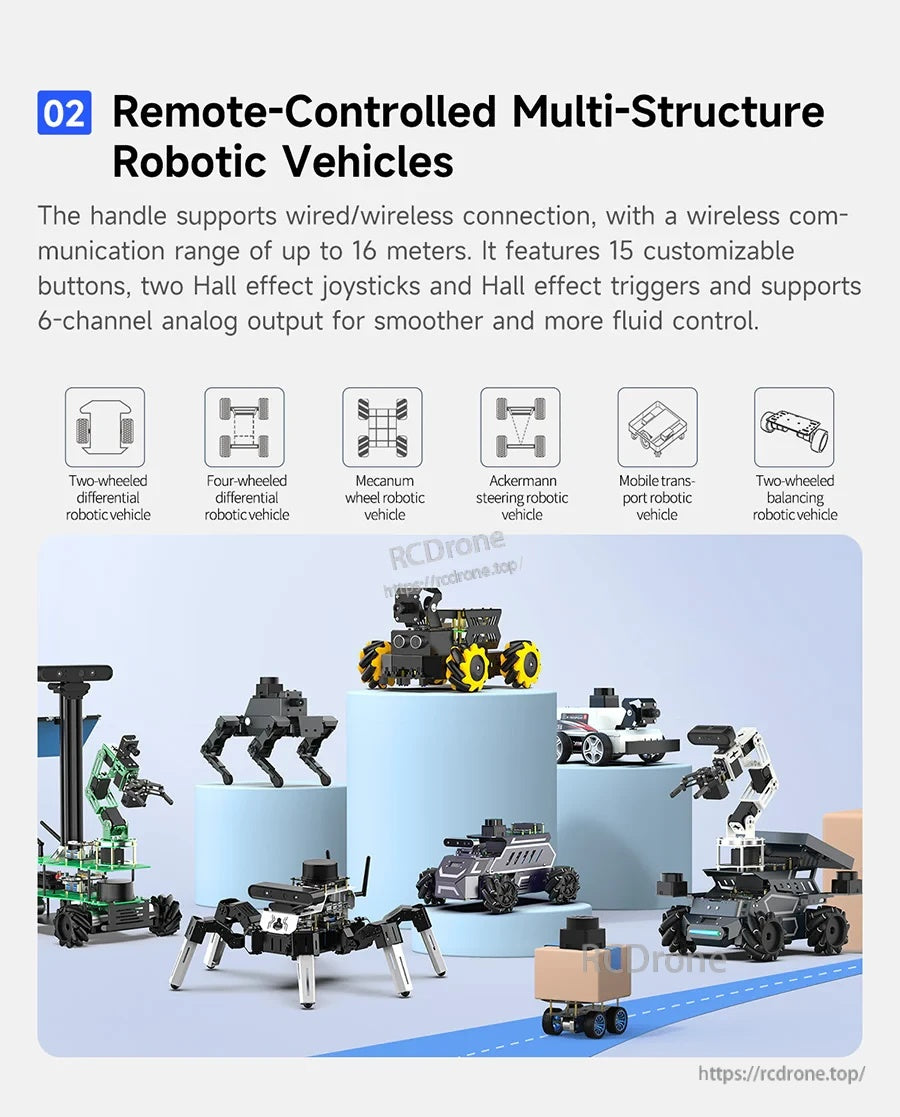
| Jarak komunikasi tanpa wayar (dinyatakan) | Sehingga 16 m |
| Butang / saluran | 15 butang; 6 saluran analog |
| Mod output joystick | Menyokong nilai output analog; menyokong output analog 6-saluran |
| Maklum balas haptik | Dengan maklum balas getaran (motor getaran asimetrik terbina dalam) |
| Pemasangan penghantaran video mudah alih | Tidak disokong |
| Sokongan ROS (jadual) | Tidak disokong |
| Isi kandungan ROS (dinyatakan di tempat lain) | Menyokong ROS1/ROS2; menyediakan tutorial penyesuaian kod pengawal ROS; menyediakan sumber terbuka |
| Bateri | 4 bateri AA atau bateri litium |
| Dimensi penerima | Penerima SBUS: 28*15*3 mm; penerima PWM: 37.8*23.7*13.5 mm |
| Dimensi pemegang | 175*150*68 mm |
| Ketahanan joystick (dinyatakan) | 5 juta jangka hayat joystick |
Nota: Satu senarai bahan produk Sokongan ROS: Tidak disokong , sementara bahan lain menyatakan Menyokong ROS1/ROS2 dan menyediakan pakej/fungsi berkaitan ROS. Spesifikasi julat mungkin berbeza mengikut mod sambungan dan persekitaran.
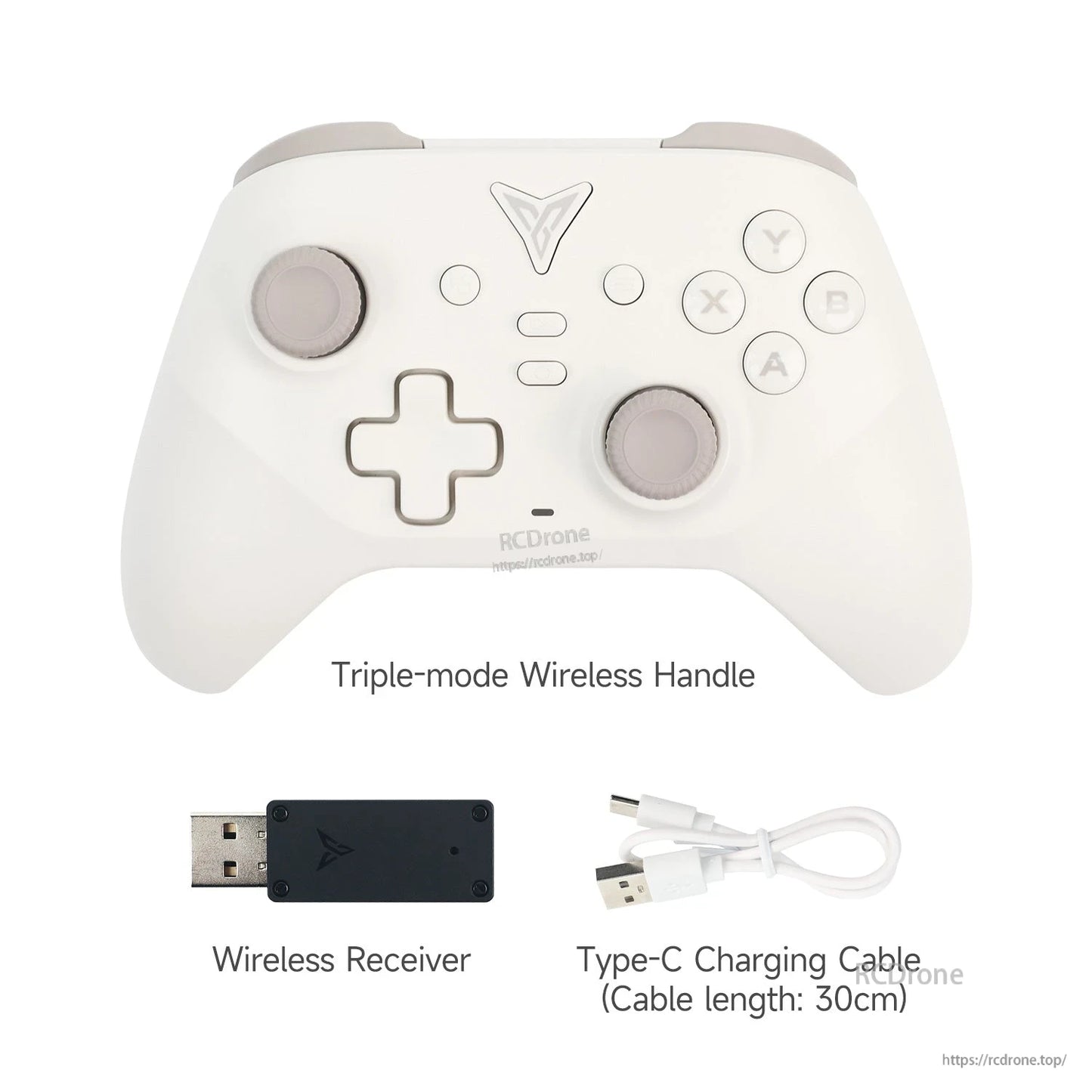
Apa yang Termasuk
- Pemegang Tanpa Wayar Tiga Mod
- 2.4G penerima USB (dongle) (dinyatakan sebagai termasuk)
- Kabel Type-C (hanya untuk pengecasan; kabel Type-C yang berasingan diperlukan untuk pemindahan data)
Aplikasi
- Pengawalan jauh robot mudah alih: robot berkaki roda, robot berjejak, robot berkaki empat, robot heksapod
- Platform dan pembangunan robotik: robot ROS, Jetson, Raspberry Pi, D-Robotics RDK
- Pengawalan pelbagai peranti secara umum: PC, Switch, telefon mudah alih
- Struktur kenderaan robotik (dinyatakan): pembezaan dua roda, pembezaan empat roda, roda mecanum, stereng Ackermann, pengangkutan mudah alih, penyeimbangan dua roda
Manual
- Tutorial / dokumentasi: https://www.yahboom.net/study/Handle
Untuk pertanyaan keserasian pra-jualan atau sokongan pemasangan, hubungi https://rcdrone.top/ atau emel [email protected].
Butiran
 Pengawal pemegang tiga mod memudahkan untuk membuat prototaip dan memandu kereta robot dan platform mudah alih lain.
Pengawal pemegang tiga mod memudahkan untuk membuat prototaip dan memandu kereta robot dan platform mudah alih lain.
Mod USB berwayar memberi tumpuan kepada kawalan stabil dengan latensi rendah untuk ujian bangku dan kawalan robotik jarak dekat.
Gunakan 2.4G tanpa wayar apabila anda ingin kawalan tanpa kabel dan penerima khusus untuk projek robotik.
Tiga pilihan sambungan—berwayar, Bluetooth, dan 2.4G—membolehkan anda memadankan pengawal dengan robot atau peranti hos anda.
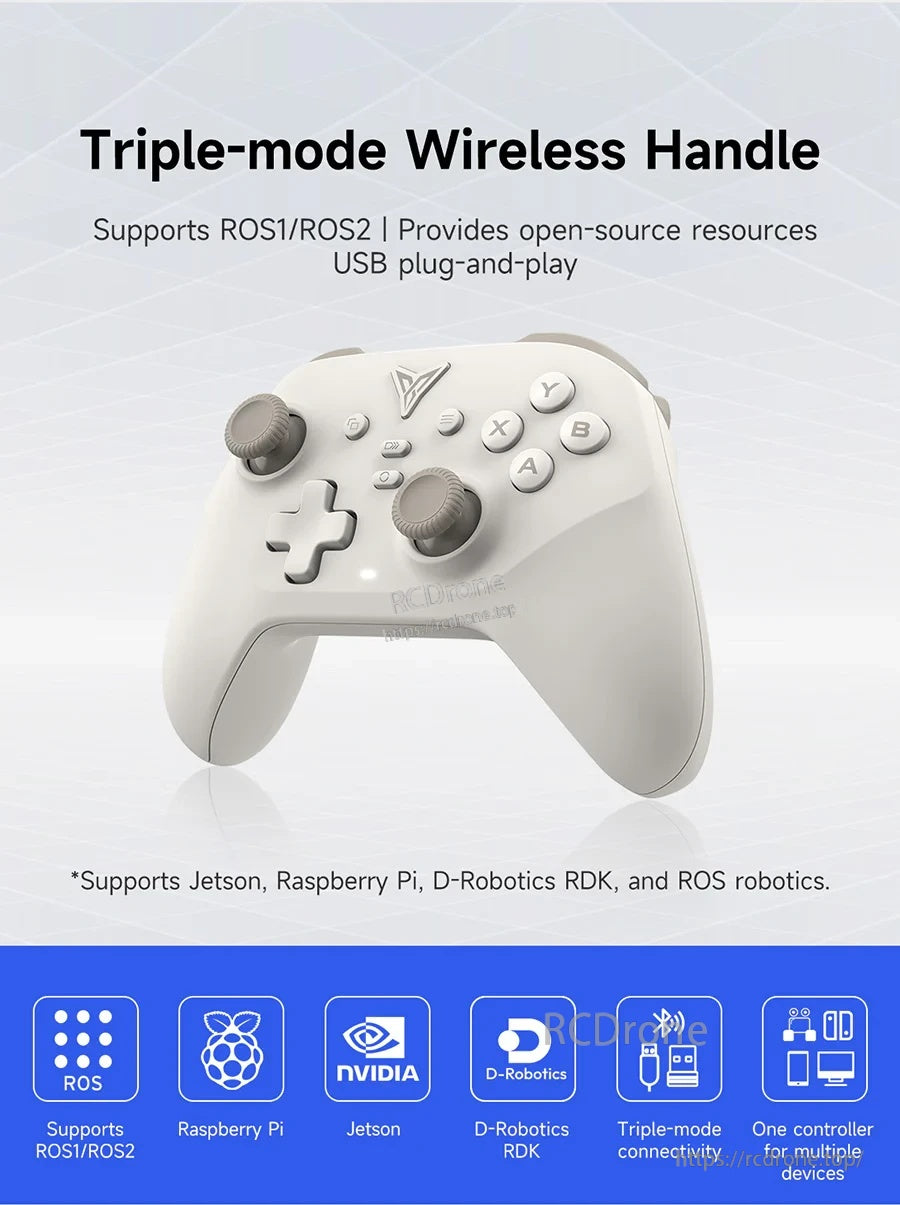
Sumber terbuka dan sokongan ROS1/ROS2 membantu mempercepatkan integrasi pengawal untuk Jetson, Raspberry Pi, dan platform serupa.

Joystick dan pemicu kesan Hall direka untuk kawalan yang lancar, tahan hanyut dan rasa yang konsisten dari semasa ke semasa.
Berpindah antara berwayar, Bluetooth, dan 2.4G untuk mengawal pelbagai binaan robot tanpa mengubah aliran kerja anda.
Berkesan untuk pelbagai jenis chasis robot, dari kereta dua roda dan kereta mecanum hingga robot berjalan.
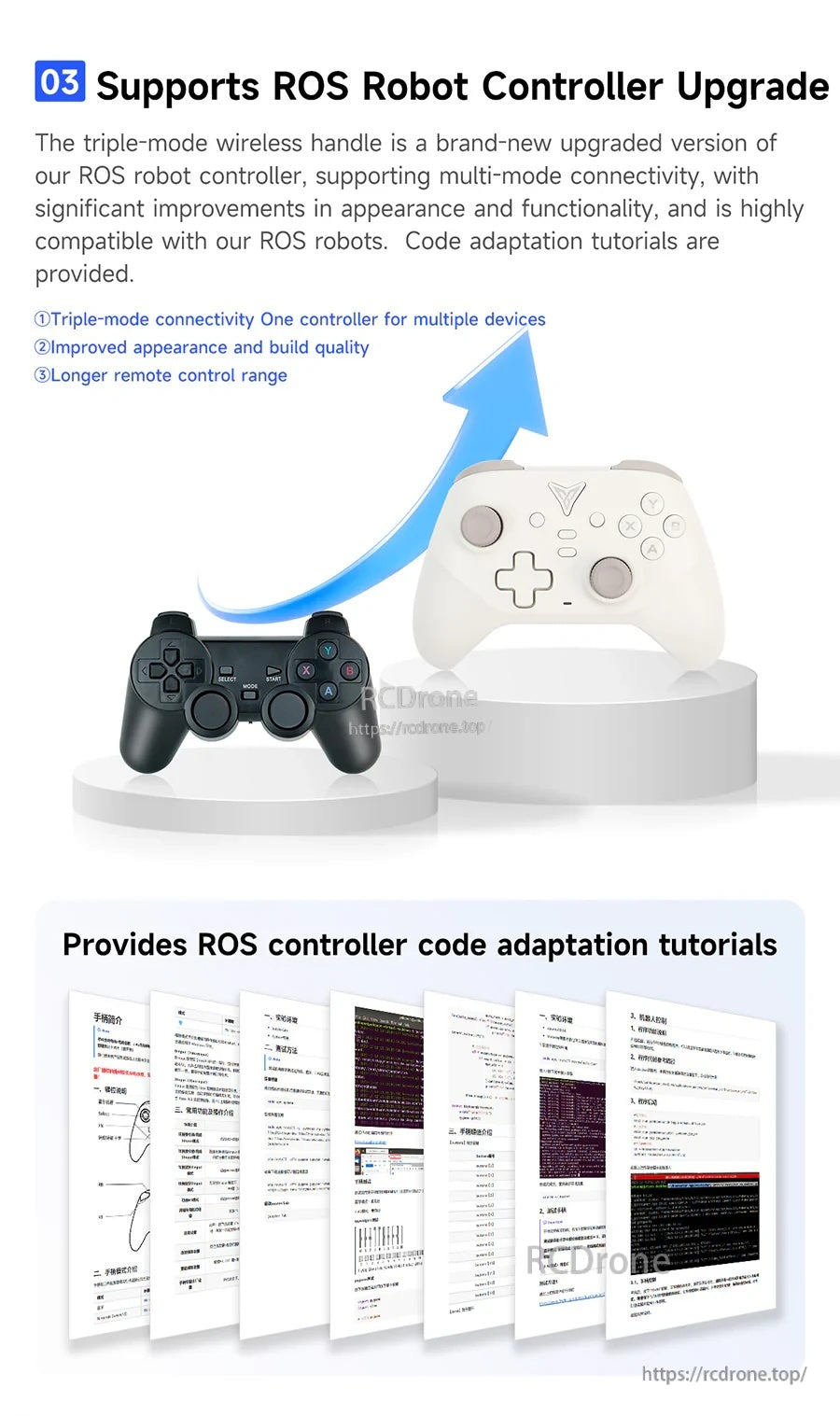
Tutorial penyesuaian kod pengawal ROS disediakan untuk membantu memetakan butang dan saluran analog ke dalam projek anda.
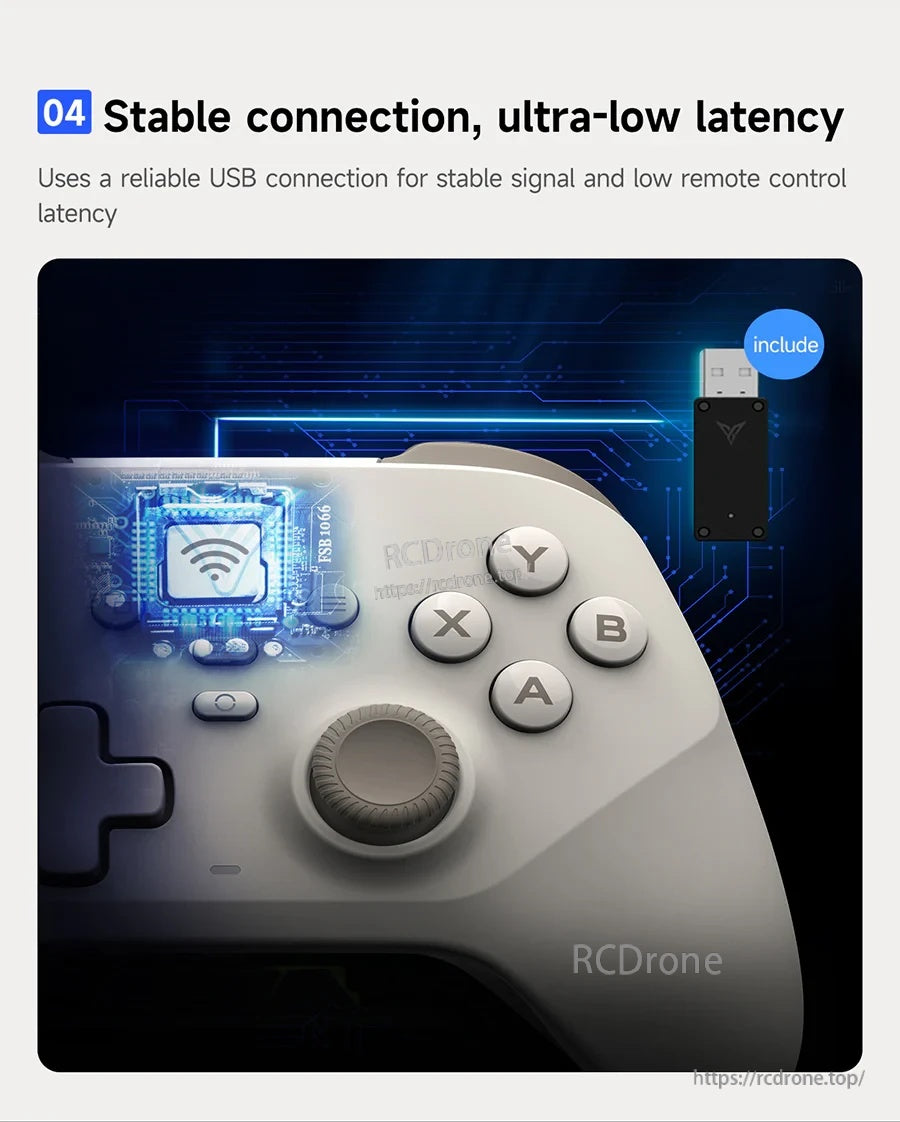
Penghantar USB disertakan untuk sambungan 2.4G yang boleh dipercayai apabila kelewatan input yang rendah adalah penting.

Motor getaran asimetrik menambah maklum balas haptik untuk pengalaman kawalan yang lebih responsif.
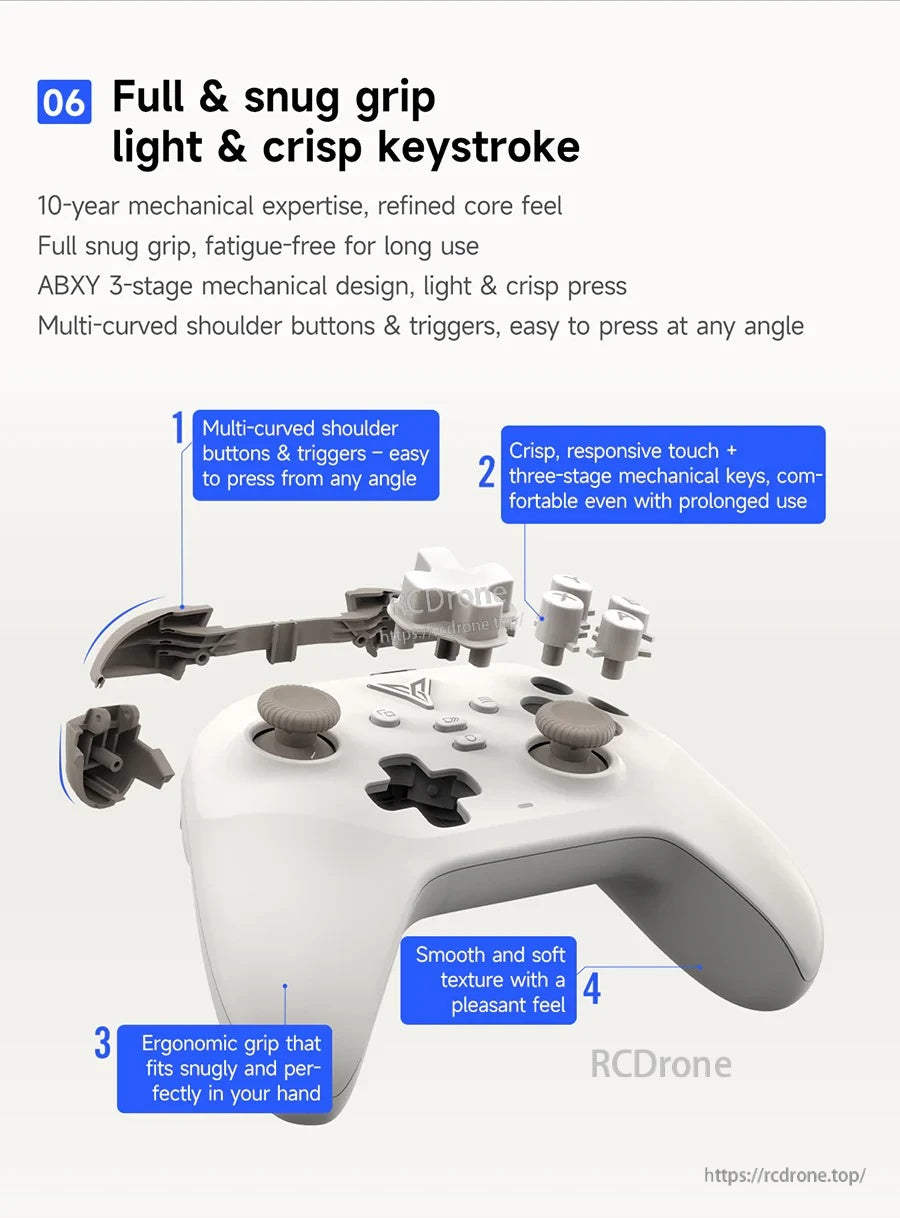
Lengkung ergonomik, butang bahu pelbagai sudut, dan ketukan yang jelas ditujukan untuk sesi memandu dan menguji robot yang panjang.



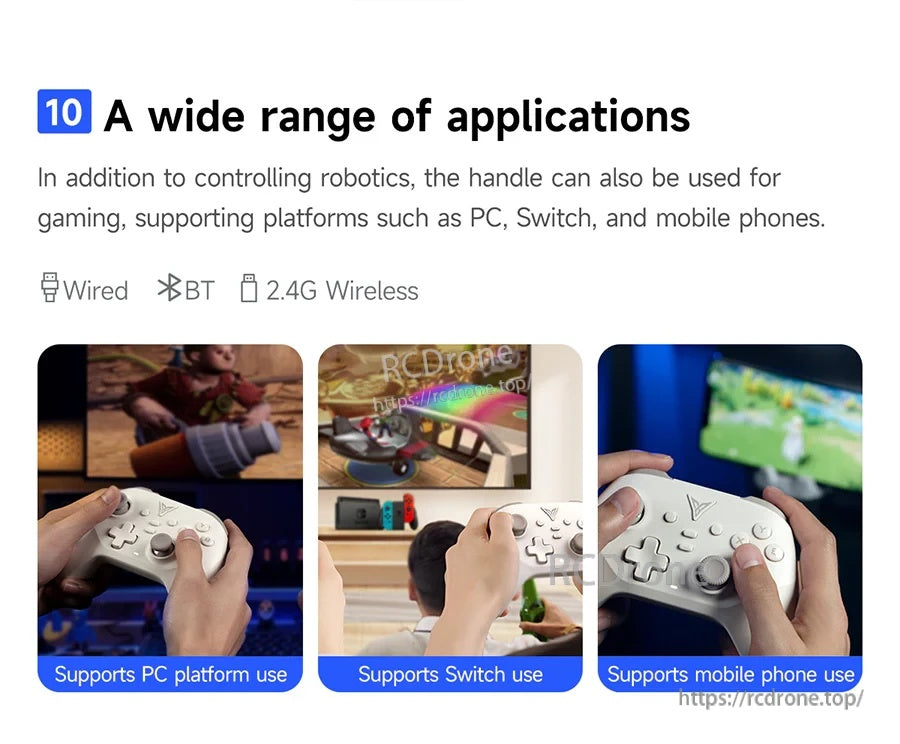
Selain pembangunan robotik, pengawal yang sama boleh digunakan dengan PC, Switch, dan peranti mudah alih bergantung kepada mod sambungan.

Contoh yang boleh dimuat turun merangkumi pemacu ROS1/ROS2 dan demo kawalan robot untuk mempercepatkan penyediaan dan pengujian.
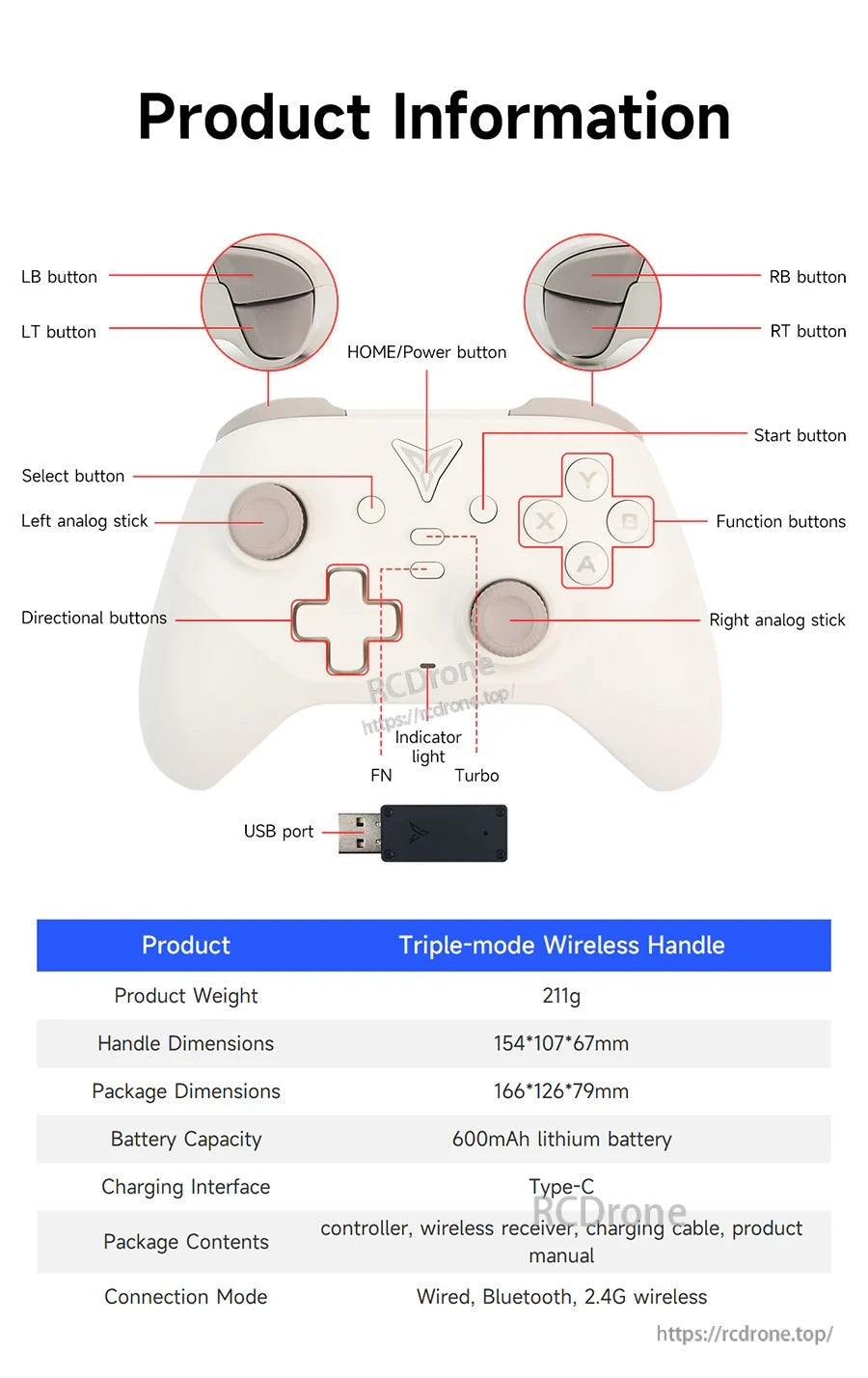
Pengawal pemegang tanpa wayar mod tiga Yahboom menyokong berwayar, Bluetooth, dan 2.Sambungan 4G, dengan pengecasan Type-C dan bateri litium 600mAh yang disenaraikan dalam spesifikasi.
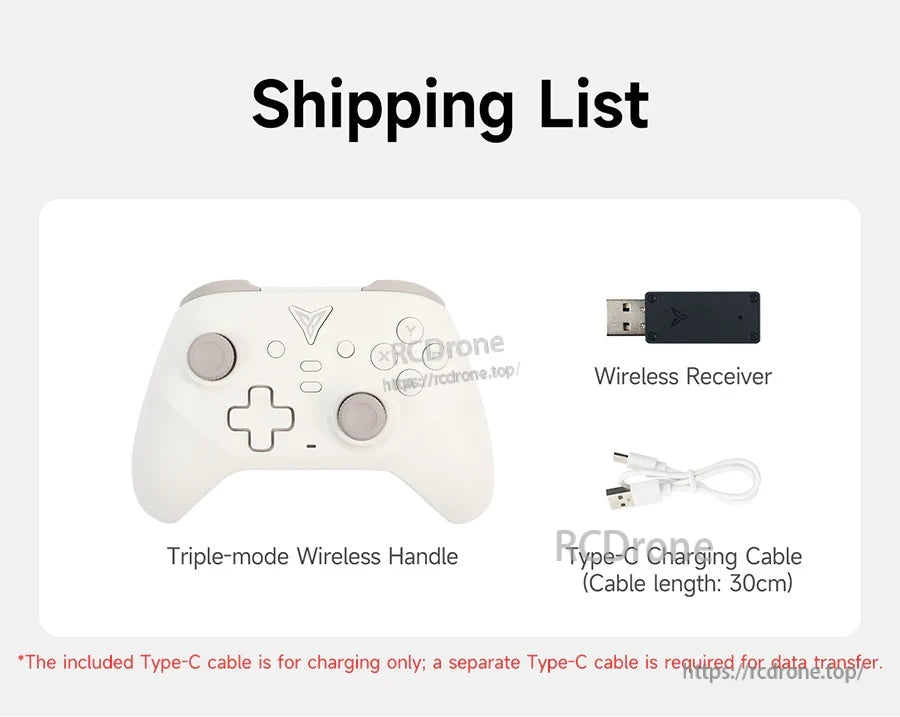
Pengendali tanpa wayar tiga mod termasuk penerima tanpa wayar USB dan kabel pengecasan USB-C pendek untuk penyediaan dan pengecasan.
Pengawal pemegang mempunyai susun atur gamepad yang biasa dengan dua joystick, D-pad, butang ABXY, dan penerima USB kompak untuk sambungan tanpa wayar.
Related Collections