-
CUAV V5+ Carrier Board Autopilot Pixhawk Flight Controller - FPV RC Drone Quadcopter Helikopter VTOL
Normale prijs $192.64 USDNormale prijsEenheidsprijs per -
CUAV NIEUWE V5+ autopilot flight controller - basis op FMU V5 Open source hardware voor FPV RC Drone Quadcopter Helicopter Pixhawk
Normale prijs Vanaf $554.59 USDNormale prijsEenheidsprijs per -
CUAV V5+/X7+ Carrier Basisbord Vluchtcontroller, Pixhawk FMU v5, STM32F765, PX4/ArduPilot
Normale prijs Vanaf $208.60 USDNormale prijsEenheidsprijs per -
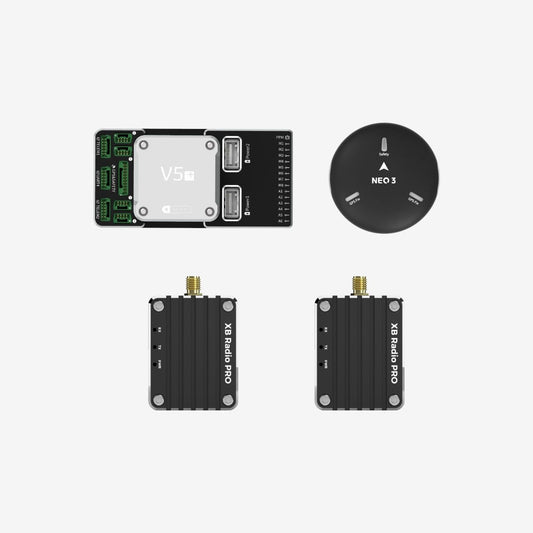
CUAV Nieuw Match Multi Rotor Copter-pakket - V5+ Autopilot Flight Controller NEO 3 GPS en XBEE Pro Telemetrieset
Normale prijs $1,066.02 USDNormale prijsEenheidsprijs per -
CUAV P9 radiogegevens en Pixhawk Drone Fpv V5+ vluchtcontroller NEO 3 Pro GPS-telemetriecombo
Normale prijs $1,645.35 USDNormale prijsEenheidsprijs per -
CUAV Nieuw één tot meerdere sterrenpakket met V5+ Flightcase RTK 9Ps GPS en P900 radiotelemetrie combokit
Normale prijs $5,056.40 USDNormale prijsEenheidsprijs per -
CUAV Nieuwe één-op-meerdere met V5 + vluchtcontroller RTK 9Ps GPS P9 radiotelemetrie GNSS-kitset
Normale prijs $3,832.45 USDNormale prijsEenheidsprijs per -
CUAV Pixhawk Drone Fpv V5+ Vluchtcontroller NEO 3 Pro GPS en Airspeed Tube SKYE Modulecombo
Normale prijs $1,105.22 USDNormale prijsEenheidsprijs per -
CUAV NIEUWE Pixhack Pixhawk V5 + Autopilot - FPV RC Drone Quadcopter Helikoptervluchtcontroller en NEO V2 3 Pro GPS Combo
Normale prijs Vanaf $616.54 USDNormale prijsEenheidsprijs per -
CUAV VTOL Rc Drone Pixhawk Autopilot V5+ Core Carrier Board-pakket met NEO 3 GPS en P9-telemetriecombo
Normale prijs $1,869.14 USDNormale prijsEenheidsprijs per -
CUAV Pixhawk Drone Fpv V5+ Vluchtcontroller NEO 3 Pro GPS en CAN Power PMU-modulecombo
Normale prijs $1,057.20 USDNormale prijsEenheidsprijs per -
CUAV CAN PDB Autopilot Carrier Board V5+ Plus Core - RC Drone Pixhawk Vluchtcontroller
Normale prijs $826.81 USDNormale prijsEenheidsprijs per -
CUAV NIEUWE Drone UAV FPV V5 + Autopilot Pixhawk Flight Controller met TF Luna Radar Lidar-module
Normale prijs $657.82 USDNormale prijsEenheidsprijs per -
CUAV NIEUWE V5 + Hardware Ontwerp Pixhack Pixhawk Autopilot Vlucht Afstandsbediening FPV RC Drone Quadcopter Helikopter Transport
Normale prijs $408.00 USDNormale prijsEenheidsprijs per