-
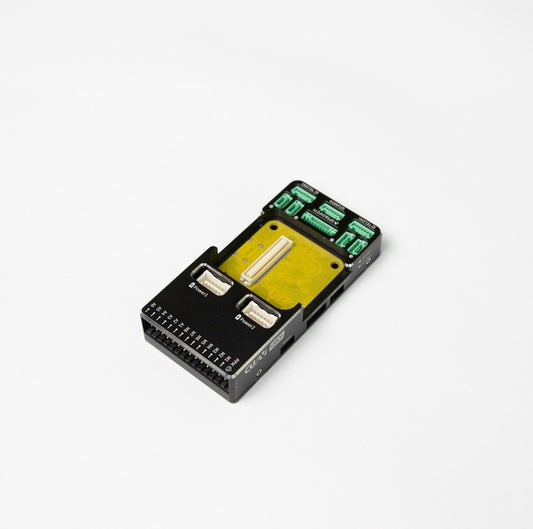
CUAV V5+ Płyta nośna Autopilot Pixhawk Kontroler lotu - FPV RC Drone Quadcopter Helikopter VTOL
Cena regularna $192.64 USDCena regularnaCena jednostkowa na -
CUAV nowy kontroler lotu autopilota V5 +-oparty na sprzęcie open source FMU V5 dla FPV zdalnie sterowany dron Quadcopter helikopter Pixhawk
Cena regularna Od $554.59 USDCena regularnaCena jednostkowa na -
CUAV V5+/X7+ Płyta Bazowa Kontrolera Lotu, Pixhawk FMU v5, STM32F765, PX4/ArduPilot
Cena regularna Od $208.60 USDCena regularnaCena jednostkowa na -
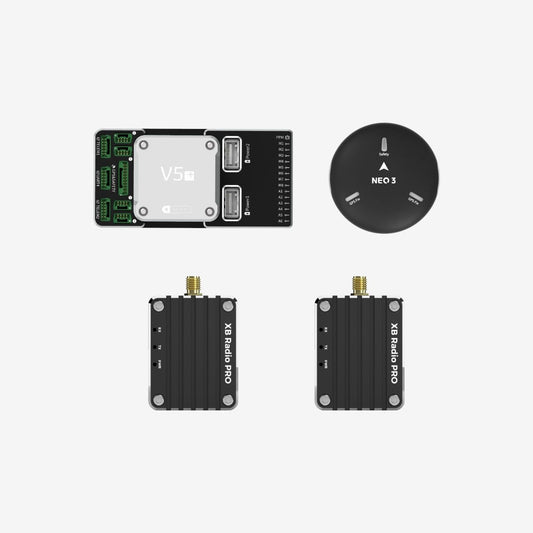
Pakiet helikopterów wielowirnikowych CUAV New Match - Kontroler lotu autopilota V5+ NEO 3 GPS i zestaw telemetryczny XBEE Pro
Cena regularna $1,066.02 USDCena regularnaCena jednostkowa na -
Dane radiowe CUAV P9 i dron Pixhawk Fpv V5 + kontroler lotu NEO 3 Pro zestaw telemetrii GPS
Cena regularna $1,645.35 USDCena regularnaCena jednostkowa na -
CUAV Nowy pakiet od jednej do wielu gwiazdek z zestawem V5+ Flight Flightcase RTK 9Ps GPS i zestawem telemetrii radiowej P900
Cena regularna $5,056.40 USDCena regularnaCena jednostkowa na -
CUAV Nowy zestaw jednego do wielu z kontrolerem lotu V5 + RTK 9Ps GPS P9 Zestaw telemetrii radiowej GNSS
Cena regularna $3,832.45 USDCena regularnaCena jednostkowa na -
CUAV Pixhawk Drone Fpv V5+ Kontroler lotu NEO 3 Pro GPS i moduł prędkościomierza SKYE Combo
Cena regularna $1,105.22 USDCena regularnaCena jednostkowa na -
CUAV nowy autopilot Pixhack Pixhawk V5 +-FPV RC Drone Quadcopter kontroler lotu helikoptera i NEO V2 3 Pro GPS Combo
Cena regularna Od $616.54 USDCena regularnaCena jednostkowa na -
CUAV VTOL Rc Drone Pixhawk Autopilot V5 + Pakiet rdzenia nośnego z zestawem telemetrycznym NEO 3 GPS i P9
Cena regularna $1,869.14 USDCena regularnaCena jednostkowa na -
CUAV Pixhawk Drone Fpv V5+ Kontroler lotu NEO 3 Pro GPS i moduł zasilania CAN PMU Combo
Cena regularna $1,057.20 USDCena regularnaCena jednostkowa na -
Płytka nośna autopilota CUAV CAN PDB V5+ Plus Core - kontroler lotu RC Drone Pixhawk
Cena regularna $826.81 USDCena regularnaCena jednostkowa na -
CUAV NOWY Drone UAV FPV V5 + Autopilot Pixhawk Kontroler lotu z modułem TF Luna Radar Lidar
Cena regularna $657.82 USDCena regularnaCena jednostkowa na -
CUAV nowy V5 + projekt sprzętu Pixhack Pixhawk Autopilot pilot lotu FPV zdalnie sterowany dron Quadcopter helikopter Transport
Cena regularna $408.00 USDCena regularnaCena jednostkowa na