







Drone P600 Drone do badań naukowych - ROS AI Eksperymentalne programowanie wtórne Platforma rozwoju przemysłowego Studio Lab Drone Zestaw do samodzielnego montażu
Drone P600 Drone do badań naukowych - ROS AI Eksperymentalne programowanie wtórne Platforma rozwoju przemysłowego Studio Lab Drone Zestaw do samodzielnego montażu
RCDrone
Nie można załadować gotowości do odbioru
Przegląd
Ten Dron badawczy P600 jest najnowocześniejszą platformą przeznaczoną do badań naukowych, rozwoju przemysłowego i eksperymentów z AI. Wyposażona w wysokowydajny Moduł obliczeniowy NVIDIA Jetson Orin NX, dostarcza Moc obliczeniowa 100 TOPS, co czyni go idealnym do zaawansowanych zastosowań AI. Ten dron charakteryzuje się 40-krotny zoom optyczny kamera z gimbalem do obrazowania o wysokiej rozdzielczości, 3D LiDAR SLAM do precyzyjnego mapowania i Pozycjonowanie RTK dla dokładności na poziomie centymetra. Jego zintegrowane oprogramowanie Prometheus V2 I Biblioteka wizji SpireCV obsługuje programowanie wtórne, co czyni go wszechstronnym narzędziem dla programistów. Z czasem lotu do 21 minut, A 600 mm oś diagonalnai solidny Masa startowa 4,05 kgP600 jest zoptymalizowany pod kątem dynamicznych środowisk badawczo-rozwojowych.
Specyfikacje
Samolot
| Atrybut | Bliższe dane |
|---|---|
| Typ samolotu | Quadrocopter |
| Masa startowa | Około 4,05 kg (wraz z baterią) |
| Odległość osi przekątnej | 600 mm |
| Wymiary | Długość 469 mm, szerokość 469 mm, wysokość 400 mm |
| Maksymalny czas zawisu | Około 21 min |
| Dokładność zawisu | RTK: ±0,015 m (poziomo), ±0,01 m (pionowo) 3D LiDAR SLAM: ±0,2 m (poziomo), ±0,1 m (pionowo) |
| Temperatura pracy | 6°C ~ 40°C |
| Główny układ MCU | STM32H743VIT6 / 216 MHz / pamięć programu 2M / pamięć danych 512 KB |
| IMU | ICM20689 |
| Barometr | BMP388 |
| MTD | AT24C64 |
| Interfejsy wejścia/wyjścia | Wbudowany PX4IO-V2, obsługuje 8Interfejsy PWM, 1Interfejs RC (obsługuje SBus, PPM, DSM) Interfejsy zewnętrzne: 3UART (GH1.25 6-pinowy), 1CAN (GH1.25 4-pinowy), interfejs USB do sterowania lotem (typ C) |
Komputer pokładowy
| Atrybut | Bliższe dane |
|---|---|
| Nazwa | Komputer pokładowy Allspark-Orin NX |
| Model | IA160_V1 |
| Waga | Około 188 g |
| Wymiary | 102,5 mm × 62,5 mm × 31 mm (wraz z wentylatorem) |
| Edytor | NVIDIA Jetson Orin NX |
| Pamięć | 16 GB pamięci LPDDR5 |
| Moc obliczeniowa | 100 NAJWYŻEJ |
| Procesor graficzny | Zintegrowane 32 rdzenie Tensor 1024-rdzeniowego procesora graficznego NVIDIA Ampere |
| Procesor | 8-rdzeniowy procesor Arm® Cortex®-A78AE v8.2 64-bitowy (2 MB L2 + 4 MB L3) |
| Dysk SSD | 128 GB (M.2 interfejsy, rozszerzalne) |
| Sieć Ethernetowa | 100 Mb/s x2 (1 dedykowany port Ethernet, 1 wymienny) |
| Wi-Fi | 5G |
| Wyświetlacz | Mikro HDMI (1920*1080P) |
| Porty USB | USB2.0: Typ-A x1, Typ-C x1 USB2.0: OTG x1 |
| Zasilacz | 10~26V przy 3A |
Akumulator zasilający
| Atrybut | Bliższe dane |
|---|---|
| Model | LPB610HV |
| Pojemność | 10000 mAh |
| Waga akumulatora | 1,2 kg |
| Napięcie robocze | 22V~26,1V |
| Napięcie magazynowania | 23,1 V |
| Wymiary | Długość 180 mm, szerokość 90 mm, wysokość 63 mm |
Pilot zdalnego sterowania
| Atrybut | Bliższe dane |
|---|---|
| Model | H16 |
| Kanały | 16 |
| Częstotliwość | 2,400~2,483 GHz |
| Napięcie robocze | 4,2 V |
| Bateria | 20000 mAh |
| Port ładowania | Typ C 9V-2A |
| Waga | 1034 gramów |
| Wymiary | Długość 272 mm, szerokość 183 mm, wysokość 94 mm |
Łącze komunikacyjne
| Atrybut | Bliższe dane |
|---|---|
| Model | R16 |
| Odległość komunikacyjna | Około 600 metrów, przepustowość 3,5 Mb/s |
| Napięcie robocze | 7,2 V~72 V |
| Interfejsy | 2UART-1Ethernet, 1HDMI, 1Typ C |
| Wymiary | Długość 76 mm, szerokość 69 mm, wysokość 11 mm |
Kamera z gimbalem
| Atrybut | Bliższe dane |
|---|---|
| Model | GX40 |
| Wymiary gimbala | Długość 85,8 mm, szerokość 86 mm, wysokość 129,3 mm |
| Wymiary GCU | Długość 45,4 mm, szerokość 40 mm, wysokość 13,5 mm |
| Waga gimbala | 405 gramów |
| Waga GCU | 18,6 grama |
| Napięcie robocze | 14V~53V |
| Protokół przesyłania strumieniowego | RTSP (domyślny) |
| Format kodowania | H.264 / H.264H / H.264B / H.265 / MJPEG |
| Rezolucja | - 4K30fps - 1080P@30fps - SCGA (12801024)@30fps <br>- 1.3M (1280960)@30fps - 720P@30fps |
| Szybkość transmisji bitów | 0,25 Mb/s ~ 10 Mb/s przy H.265, 0,5 Mb/s ~ 16 Mb/s przy H.264 |
Obiektyw
| Atrybut | Bliższe dane |
|---|---|
| Typ | Obiektyw z zoomem optycznym |
| Długość ogniskowej | 4,8~48 mm |
| Przysłona (F/NO) | f1,7~f3,2 |
| Pole widzenia diagonalne (D) | 67,2°~7,6° |
| Pole widzenia pionowe (V) | 36,1°~3,7° |
| Poziome pole widzenia (H) | 60,2°~6,6° |
| Współczynnik powiększenia optycznego | 10x |
Czujnik obrazu
| Atrybut | Bliższe dane |
|---|---|
| Typ czujnika | CMOS |
| Efektywne piksele | 8,29 mln |
| Rozmiar czujnika | 1/2,8" |
| Rozmiar piksela | 1,45×1,45 (μm) |
| Prędkość elektronicznej migawki | 1~1/30000s |
Iluminator
| Atrybut | Bliższe dane |
|---|---|
| Typ | Laser |
| Długość fali | 850±10nm |
| Moc | 0,8 W |
| Odległość oświetlenia | ≤200 metrów |
RTK
| Atrybut | Bliższe dane |
|---|---|
| Model | M15-RTK |
| Waga | 90 gramów |
| Wymiary | Długość 80 mm, szerokość 50 mm, wysokość 20 mm |
| Obsługiwane typy satelitów | BDS-GPS-GLONASS-QZSS |
| Zasilacz | 9~36 V (zalecane 12 V) |
| Złącze antenowe | SMA-F |
| Porty funkcjonalne | UARTx2, CANx1, USB2.0x1 |
Rumak
| Atrybut | Bliższe dane |
|---|---|
| Model | C1-XR |
| Napięcie wejściowe prądu przemiennego | 100~240 V |
| Napięcie wejściowe DC | 11~18V |
| Wymiary | Długość 130 mm, szerokość 115 mm, wysokość 61 mm |
| Waga | 380 gramów |
| Prąd ładowania | 0.1A~10A |
| Obsługiwane ogniwa baterii | 1~6 komórek |
LiDAR 3D
| Atrybut | Bliższe dane |
|---|---|
| Model | MID360 |
| Długość fali lasera | 905nm |
| Zasięg wykrywania | 40 m (przy współczynniku odbicia 105%) |
| Pole widzenia (FOV) | Poziomo: 360°, Pionowo: -7°~52° |
| Minimalny zasięg | 0,1 mln |
| Stawka chmury punktów | 10 Hz (typowo) |
| Punkty na sekundę | 200 000 pkt/sek. |
| Interfejs danych | 100-bitowa sieć Ethernet-TX |
| Synchronizacja danych | IEEE 1588-2008 (PTP v2), GPS |
| Wewnętrzny IMU | ICM40609 |
| Zasilacz | 7~27V |
| Wymiary | 65 mm (szer.) x 65 mm (gł.) x 60 mm (wys.) |
| Waga | 115 gramów |
| Temperatura pracy | -20°C ~ 55°C |
Parametry oprogramowania
Komputer pokładowy
| Atrybut | Bliższe dane |
|---|---|
| Model | Jetson Orin NX |
| System operacyjny | Ubuntu 20.04 |
| Nazwa użytkownika | amov |
| Hasło | amov |
| Wersja L4T | 35.2.1 |
| Wersja Jetpack | 5.1 |
| Wersja CUDA | 11.4.315 |
| Zestaw SDK Realsense | 2.50.0 |
| Wersja ROS | intelektualny |
| Wersja OpenCV | 4.7.0 |
| Realsense ROS | 2.3.2 |
Lista pakietów
| Nazwa | Specyfikacja/Model | Ilość/Jednostka |
|---|---|---|
| Samolot główny P600 | P600-Allpark2-RTK-GX40-S3 | 1 zestaw |
| Zacisk uziemiający M15-RTK | M15-RTK | 1 sztuka |
| Antena grzybkowa GNSS | Antena grzybkowa | 1 sztuka |
| Przewód przedłużający antenę GNSS | Przewód przedłużający antenę | 1 kabel |
| Pilot zdalnego sterowania H16 | H16 | 1 jednostka |
| Akumulator 6S 10000mAh | 6S 10000mAh | 1 zestaw |
| Bateria litowa 3S 4000mAh | 3S 4000mAh | 1 zestaw |
| Inteligentna ładowarka równoważąca | C1-XR | 1 jednostka |
| Kabel sieciowy | 1,5m | 1 kabel |
| Lina bezpieczeństwa | 50 metrów | 1 opakowanie |
| Uchwyt HDMI | / | 1 sztuka |
| Kabel adaptera HDMI | / | 1 sztuka |
| Konfiguracja komputera | / | 1 sztuka |
| Płyta opadająca 2D | 35×35 cm | 1 sztuka |
| Sprawa lotnicza | Wymiary: 740×540×510 mm | 1 zestaw |
| Zestaw kabli akcesoryjnych | / | 1 opakowanie |
| Certyfikat | / | 1 arkusz |
| Lista kontrolna testów funkcjonalnych | / | 1 arkusz |
Bliższe dane
Platforma rozwoju dronów badawczych Prometheus 600
Ten Platforma rozwoju dronów badawczych Prometheus 600 (oznaczany jako P600) jest produktem czwartej generacji w serii P600. Głęboko integruje dwie podstawowe technologie, Prometeusz I SpireCVi jest wyposażony w kamerę z 40-krotnym zoomem optycznym. Ta konfiguracja umożliwia wykrywanie i śledzenie celów z dużej odległości, autonomiczne lądowanie z dużych wysokości i powietrzne misje przelotowe.
System obsługuje technologię 3D LiDAR SLAM z Szybko-lio, osiągając wysoce precyzyjne mapowanie 3D SLAM. Dodatkowo, posiada Algorytm współpracy wieloagentowej EGO-Swarm, co umożliwia zastosowanie w różnych scenariuszach, takich jak rekonstrukcja przestrzenna 3D wewnątrz i na zewnątrz pomieszczeń oraz omijanie przeszkód podczas nawigacji dronów.
Te zaawansowane możliwości uzupełniane są przez Profesjonalna stacja naziemna Prometheus, który zapewnia wizualne informacje zwrotne w czasie rzeczywistym, monitorowanie operacji i dynamiczną regulację parametrów, dzięki czemu programiści mogą łatwiej opanować i przyspieszyć proces tworzenia oprogramowania wtórnego.

Trzy wersje drona P600

Elastyczna kontrola optyczno-elektronicznego gimbala
Kamera GX40 z gimbalem obsługuje sterowanie wieloma scenariuszami i integruje zdalne sterowanie oparte na łańcuchu, aby umożliwić wyszukiwanie celu podczas nawigacji po punktach orientacyjnych. Korzystanie z Biblioteka wizji SpireCVułatwia wykrywanie i śledzenie celów, umożliwiając zablokowanie stabilizatora na celu w czasie rzeczywistym.
- Oświetlenie nocne
- Wykrywanie i śledzenie celów

Celowanie w kliknięcia i śledzenie
Korzystanie z Algorytm wykrywania YOLOv5 i wykorzystując uniwersalny zbiór danych COCO, cele są wykrywane i śledzone. Algorytm śledzenia Nanotrack blokuje wybrane cele w celu śledzenia. Bez zmian warunków można zidentyfikować i śledzić cele oddalone o 30 metrów. Poprzez 40-krotny zoom optyczny i zoom elektroniczny, osiąga się wykrywanie i śledzenie celów na duże odległości. Podczas śledzenia drona, Profesjonalna stacja naziemna Prometheus umożliwia dynamiczne przełączanie śledzenia celu w zależności od odległości (domyślnie 10 metrów).
- Śledzenie w promieniu 30 m
- Śledzenie w odległości 20m
- Śledzenie w promieniu 10 m

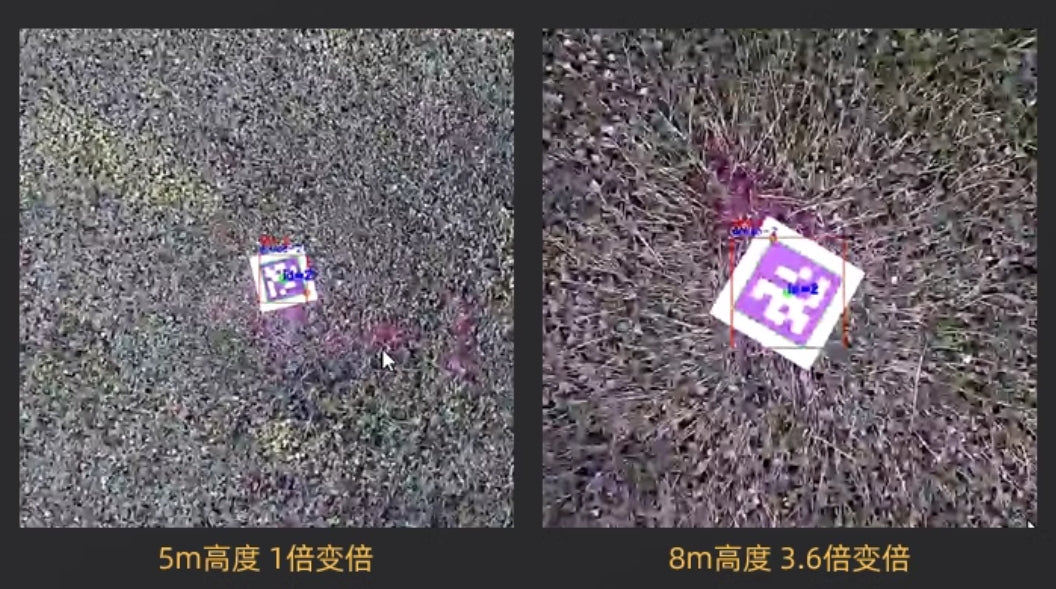
Lądowanie z przewodnikiem po kodzie QR
Korzystanie z Biblioteka wizji SpireCV, osiągnięto precyzyjne wykrywanie i szacowanie położenia kodów QR. GX40 może wykonywać precyzyjne lądowanie na kodach QR z różnych wysokości. Środek kamery gimbala jest wyrównany ze środkiem kodu QR z marginesem błędu 30 cm.
- Wysokość 5m, 1x Zoom
- Wysokość 8m, zoom 3,6x
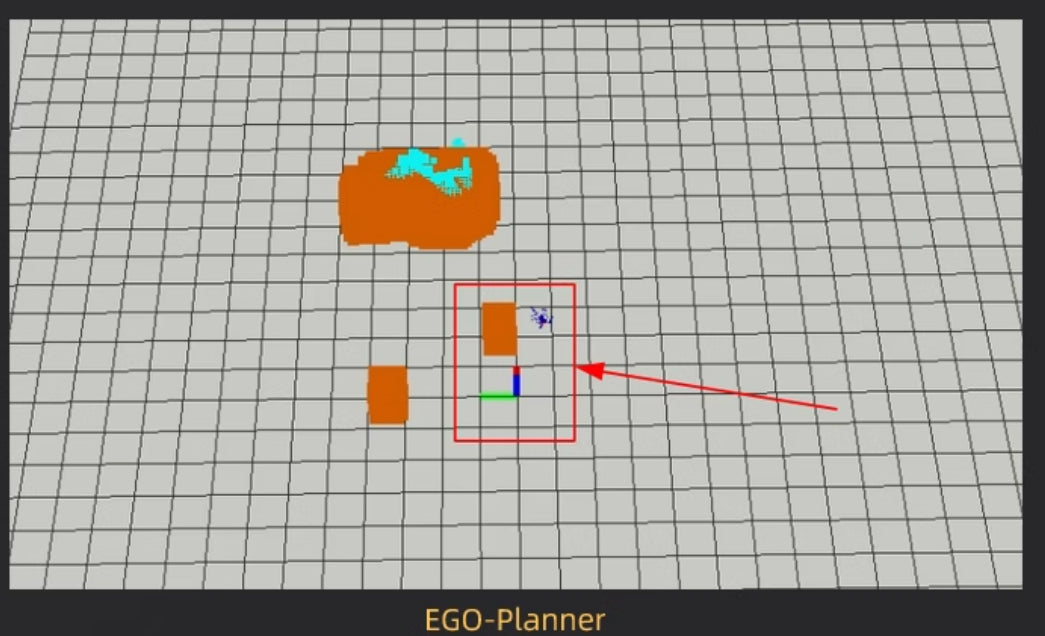
EGO-Planer
Wspiera Algorytm planowania ścieżki EGO-Planner i zapewnia Algorytm mapowania OctomapW połączeniu z profesjonalną stacją naziemną umożliwia autonomiczne, dynamiczne planowanie ścieżki 3D.
Stabilne i niezawodne aplikacje do sterowania dronami
Dron P600 jest wyposażony w wysoce precyzyjny sprzęt RTK, który zapewnia wysoką dokładność zawisu na zewnątrz z precyzją poziomą do 1 cm i precyzją pionową do 1,5 cm. W połączeniu z Moduł sterujący systemem oprogramowania Prometheus, umożliwia precyzyjną kontrolę drona.
Moduł sterowania dronem działa jako „pomost” między programami a dronem, zapewniając wiele stanów sterowania, takich jak początkowe zawisanie w pozycji, bieżące zawisanie w pozycji, lądowanie i ruch. Obejmują one sześć trybów sterowania: zwyczajowe położenie systemu, prędkość, zintegrowane sterowanie położeniem i prędkością oraz tryb sterowania trajektorią. Łącznie oferuje siedem trybów sterowania.

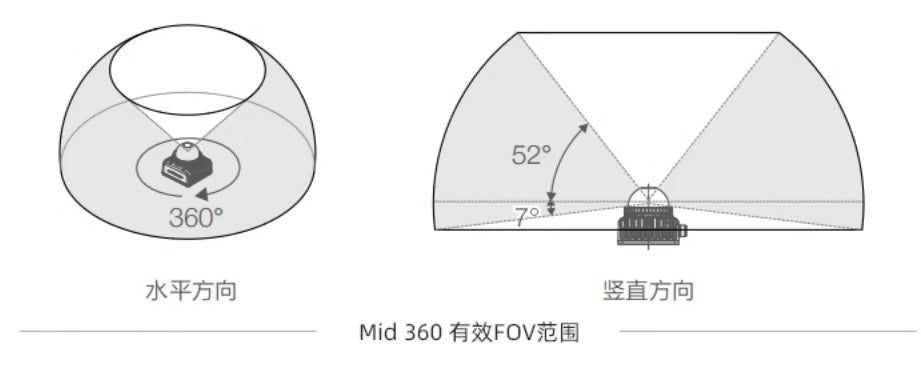
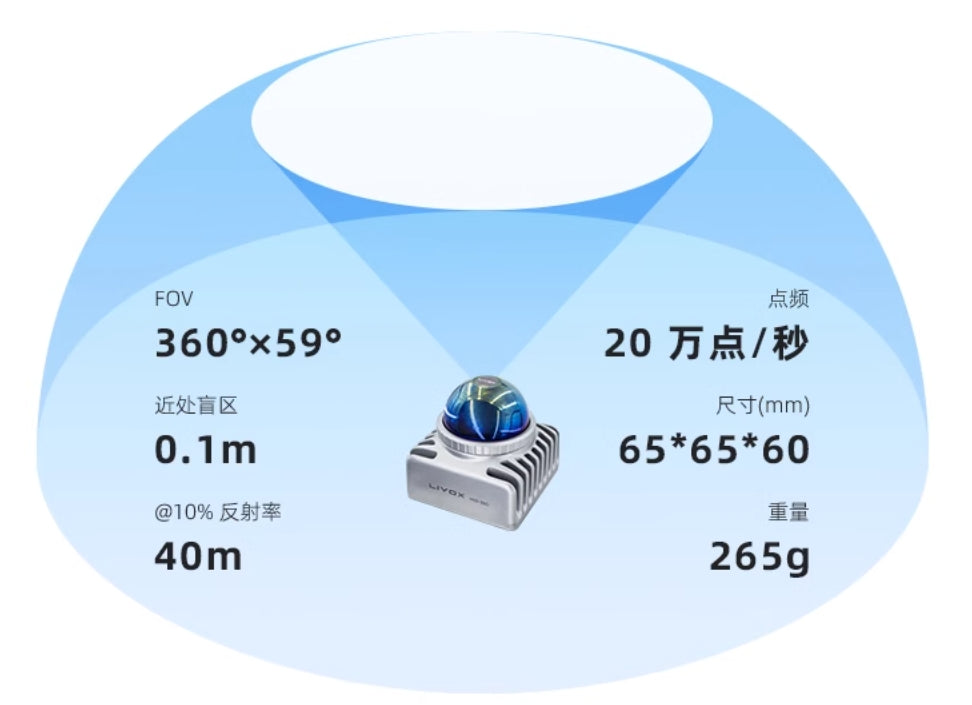
LiDAR 3D Mid-360
- Niska martwa strefa | Szerokie pole widzenia | Zastosowanie w wielu scenariuszach
Ten Połowa 360 zawiera 360° poziome pole widzenia i maksymalny pionowy kąt widzenia 59°. Gdy współczynnik odbicia obiektu docelowego wynosi 10%, maksymalny zasięg wykrywania może osiągnąć 40 metrów, a zakres strefy martwej jest tak mały, jak 10 metrów. Dostosowuje się do różnych złożonych środowisk, takich jak słabe i silne światło.
Wyposażony w moduł Mid-360, Dron P600 zapewnia panoramiczne pokrycie martwej strefy, gwarantując bezproblemową pracę dronów w różnych scenariuszach.
- Opisy diagramów:
- Kierunek poziomy: 360°
- Kierunek pionowy: maksymalny FOV 52°

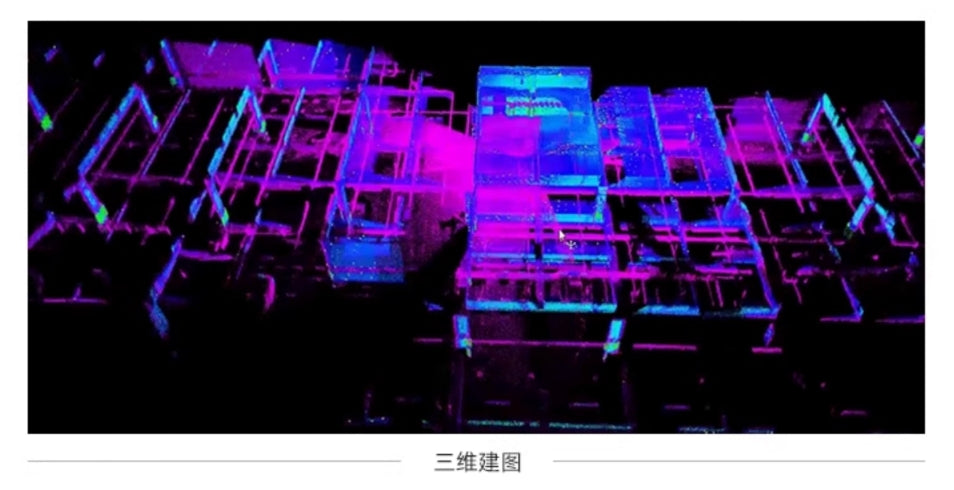
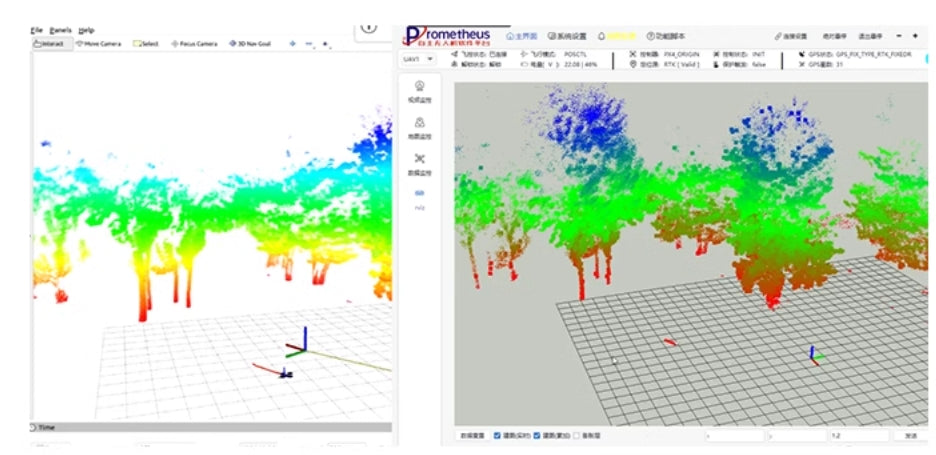
Szybkie i dokładne mapowanie środowiska 3D
Ten Dron P600 jest wyposażony w zaawansowane możliwości wykrywania środowiska, co pozwala mu na szybkie zbieranie danych środowiskowych w trakcie lotu. Dane te są przetwarzane w czasie rzeczywistym w celu wygenerowania Mapa środowiskowa 3Dzapewniając precyzyjną świadomość przestrzenną i wsparcie nawigacyjne dla różnych zadań.
Planowanie ścieżki EGO-Swarm w celu nawigacji i omijania przeszkód
Ten Mid360 publikuje dane w postaci chmury punktów i dane o lokalizacji, połączone z Algorytm planowania ścieżki EGO-Swarm, znacznie zwiększając zdolność drona do autonomicznego dostosowywania się do dynamicznych zmian w środowisku. Może analizować i reagować w czasie rzeczywistym na przeszkody podczas ruchu i dynamicznie dostosowywać cel śledzenia z maksymalną prędkością 2 mili na sekundę. Zapewnia to wyjątkową elastyczność i zdolność adaptacji w nieznanych i złożonych scenariuszach operacyjnych.
Funkcja ta znacznie zwiększa wydajność pracy drona, umożliwiając mu skuteczne i dokładne wykonywanie wielu zadań
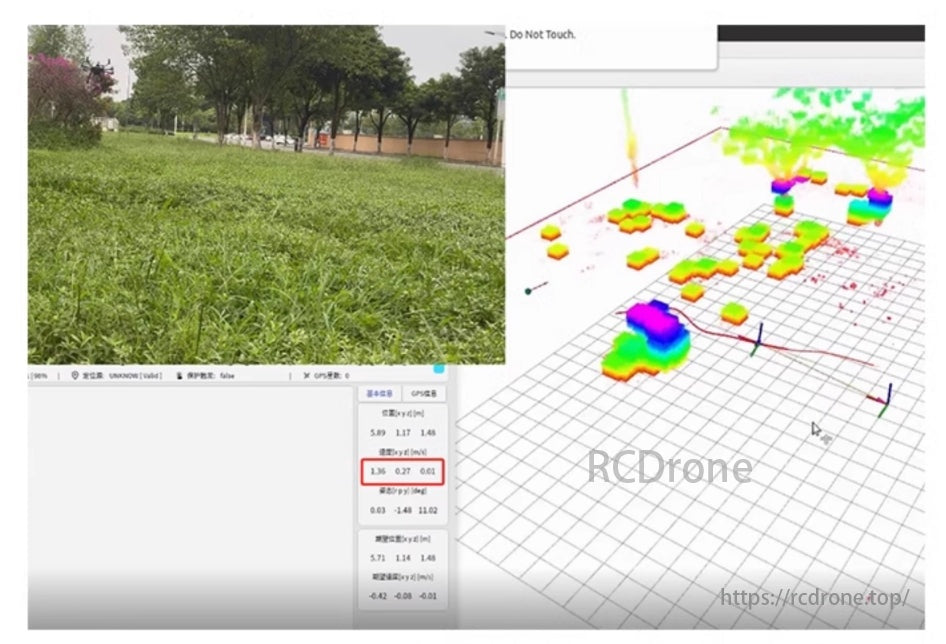
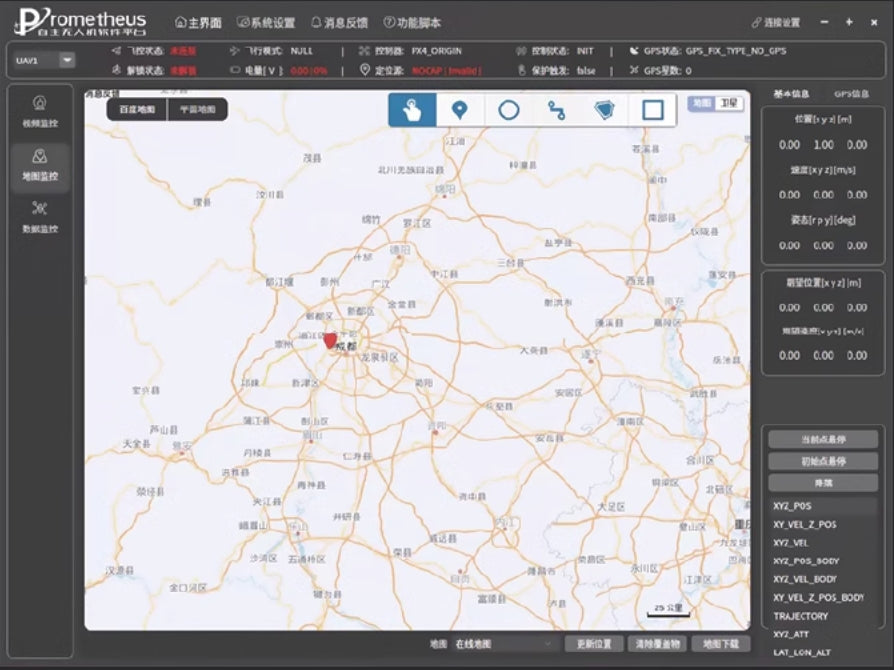
Interakcja drona ze stacją naziemną Prometheus Professional
- Interakcja ze stacją naziemną
Prezentuje interfejs i możliwości interakcji Profesjonalna stacja naziemna Prometheus, umożliwiając bezproblemową komunikację i sterowanie dronem poprzez trójwymiarowe mapowanie otoczenia.
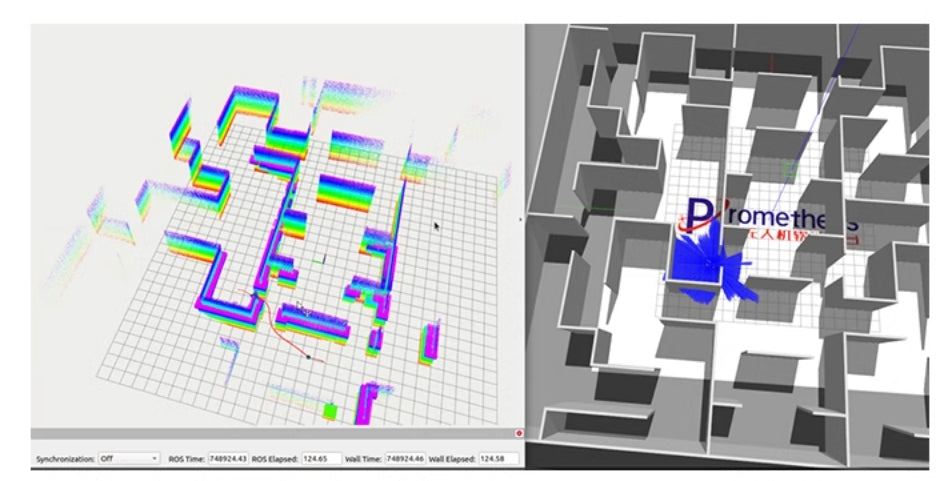
Zintegrowana funkcja symulacji demonstracyjnej
- Symulowane 3D LiDAR SLAM i planowanie ścieżki EGO-Swarm
Ilustruje to symulację 3D LiDAR SLAM I Planowanie ścieżki EGO-Swarm w ramach ustrukturyzowanego środowiska, prezentując możliwości systemu w kontrolowanej wersji demonstracyjnej.
Funkcje sprzętowe
Rama drona
Ten Kedway DP1000 platforma dronów klasy przemysłowej wykorzystuje FOC (sterowanie zorientowane na pole) układ zasilania, umożliwiający silnikowi stabilne obracanie się, niski poziom hałasu, wysoką wydajność i szybką reakcję dynamiczną. Cały system drona osiąga stan „gotowości do lotu” z doskonałą jakością sprzętu, zapewniając stabilną wydajność lotu. Obsługuje ultradługa wytrzymałość (70 minut bez ładunku), podczas gdy Dron P600 wymaga około 24 minuty na stabilizację podczas pozycjonowania.

Potężna jednostka obliczeniowa
- Jednostka obliczeniowa Allspark Micro Edge, wyposażony w Moduł NVIDIA Orin NX, zapewniając 100 TOPS mocy obliczeniowej dla obliczeń zmiennoprzecinkowych.
- Kompaktowy rozmiar, niewielka waga, solidna kompatybilność systemowa i Wysokowydajne obliczenia wspomagane przez GPU.
- Zawiera wszystkie wstępnie zainstalowane środowiska programistyczne, gotowe do użycia, co zwiększa wydajność wtórnego rozwoju.
- Wymiary: 102,5 mm × 62.Wymiary: 5 mm × 31 mm

Zintegrowany kontroler transmisji obrazu
Jakiś kontroler drona klasy przemysłowej łącząc dane, obraz i kontrolę w jednym.
- Pasmo częstotliwości: 2,4-2,483 GHz
- Maksymalna odległość transmisji: 30 km
- Jakość obrazu: 1080P
- Żywotność baterii: 8-15 godzin ciągłej pracy
Podczas lotu użytkownicy mogą monitorować informacje o dronie w czasie rzeczywistym, oglądać nagrania z kamery i jednocześnie sterować dronem za pomocą joysticka, co zapewnia pełną wizualizację lotu.

Podwójna antena RTK o wysokiej precyzji
Dron wyposażony jest w Moduł pozycjonowania RTK-GNSS, który wykorzystuje szybką technologię różnicowego pozycjonowania fazy nośnej i algorytmy tłumienia wielodrożności, aby zapewnić dokładność pozycjonowania dronów na poziomie centymetrów. Może jednocześnie odbierać dane RTCM z wielu naziemnych stacji referencyjnych, obsługując obliczenia RTK krótkiej, średniej i długiej linii bazowej.
Z wbudowaną obsługą wielu języków Interfejs graficzny sieci Web, umożliwia konfigurację zerowego progu i wizualizację wyświetlania danych oraz procesy aktualizacji. Odbiornik posiada również przyjazny dla użytkownika interfejs konfiguracji strony internetowej, znacznie obniżając barierę operacyjną. Oferuje bogate interfejsy i jest dostosowany do różnych scenariuszy aplikacji, zapewniając wyjątkową wydajność w precyzyjnym pozycjonowaniu.

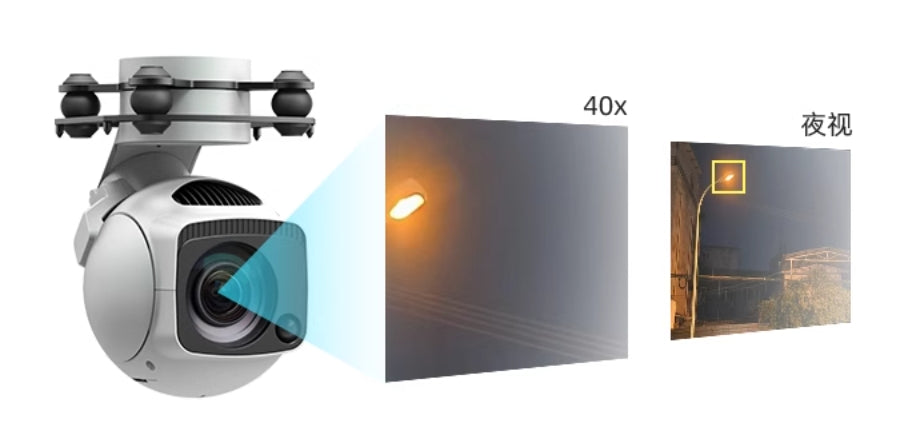
40x optyczno-elektroniczny gimbal
Wyposażony w wysoce precyzyjny 3-osiowy nieortogonalny gimbal, posiada 8,29-megapikselowy aparat z 10-krotnym zoomem optycznym w połączeniu z technologią zoomu cyfrowego, osiągając powiększenie do 40x. Może wyprowadzać 4K@30FPS video strumienie przez sieć. Dodatkowo jest wyposażony w moduł oświetlenia laserowego, umożliwiający wyraźne obrazy nawet w całkowicie ciemnych środowiskach.
LiDAR 3D MID 360
Mid-360 to ekonomiczny, bezpieczny i niezawodny czujnik laserowy do wykrywania i pomiaru odległości. Jest szeroko stosowany w takich dziedzinach jak roboty logistyczne, roboty przemysłowe i inteligentne miasta, obsługując funkcje takie jak mapowanie, pozycjonowanie, identyfikacja i unikanie przeszkód. Mid-360 może wykrywać obiekty oddalone od 0,1 metra do 100 metrów. Charakteryzuje się kompaktowymi rozmiarami, szerokim polem widzenia, wysoką rozdzielczością, wysoką niezawodnością i zintegrowanym IMU.
Specyfikacje:
- Pole widzenia: : 360° × 59°
- Minimalna odległość wykrywania: 0,1m
- Zasięg (@10% współczynnika odbicia): 40 metrów
- Częstotliwość punktu: 200 000 punktów na sekundę
- Wymiary (mm): : 65 × 65 × 60
- Waga: 265 gramów
Funkcje oprogramowania
System oprogramowania Prometheus V2
Platforma programistyczna opiera się na ROS i otwartym frameworku Prometheus, oferując bogate funkcjonalności i dużą liczbę drugorzędnych interfejsów programistycznych dla wydajnej personalizacji. Zapewnia interfejsy dla danych o stanie i czujnikach UAV, w tym informacje o lokalizacji, tryby lotu, stan baterii i IMU. Ponadto oferuje interfejsy sterujące dla położenia, prędkości, przyspieszenia i postawy, a także przykładowe programy do wykorzystania interfejsu programistycznego. UAV zawiera również wbudowane funkcje kontroli bezpieczeństwa lotu (nie omijania przeszkód), umożliwiając automatyczne lądowanie w nietypowych sytuacjach w celu zmniejszenia ryzyka zderzenia, dzięki czemu rozwój jest bezpieczniejszy.

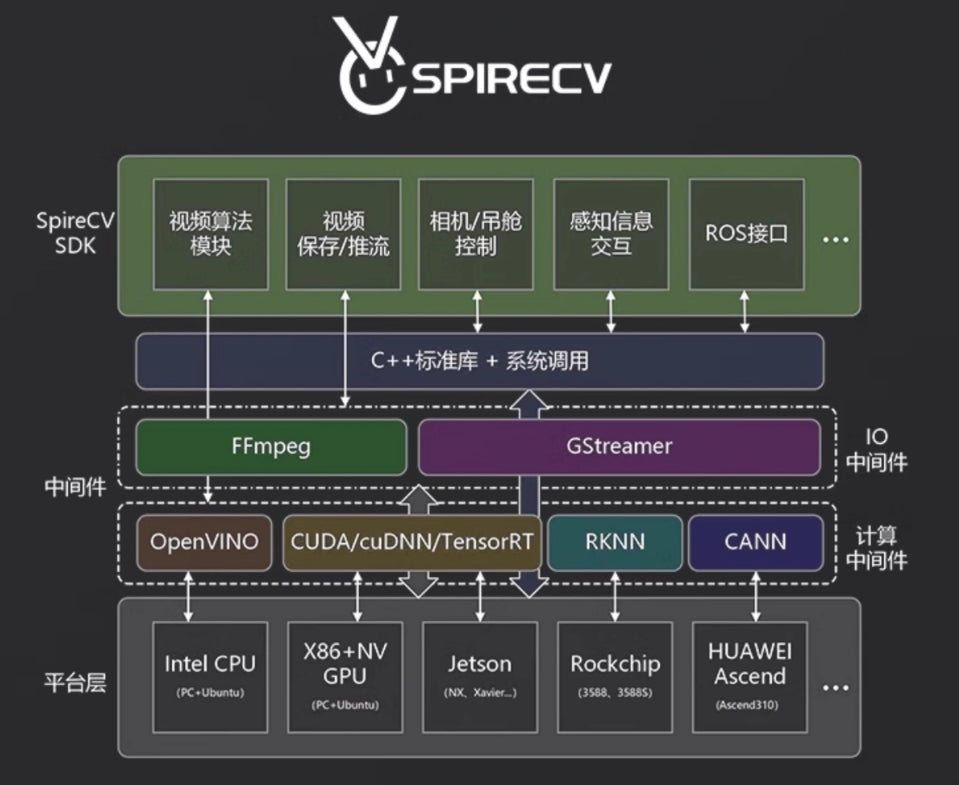
Biblioteka wizji SpireCV
Bazując na bibliotece wizji SpireCV, jest to pokładowy zestaw SDK do przetwarzania obrazu w czasie rzeczywistym zaprojektowany specjalnie dla inteligentnych systemów bezzałogowych. Jego główne funkcje obejmują sterowanie gimbalem/kamerą, przechowywanie wideo, przesyłanie strumieniowe, wykrywanie celów, rozpoznawanie i śledzenie. Ma on na celu zapewnienie programistom inteligentnych systemów bezzałogowych wydajnych, wysoce niezawodnych, prostych i bogatych w funkcje możliwości przetwarzania wizji. Ten model obsługuje szkolenie YOLO dla funkcji śledzenia pojazdów metodą „wskaż i kliknij”.
System stacji naziemnej Prometheus
Stacja naziemna Prometheus to interfejs człowiek-maszyna opracowany przy użyciu Qt, oparty na systemie Prometheus. Wykorzystuje komunikację TCP/UDP, aby uprościć konfigurację komunikacji wielomaszynowej. Stacja naziemna umożliwia użytkownikom szybkie powielanie różnych funkcji systemu Prometheus, zapewniając monitorowanie statusu UAV w czasie rzeczywistym, a także funkcje takie jak start, lądowanie i operacje sterowania pozycją za pomocą jednego kliknięcia.
Aplikacje
-
Badania naukowe i rozwój sztucznej inteligencji
- Testowanie algorytmów AI
- Zaawansowana analiza danych z czujników
- Przetwarzanie i śledzenie obrazu w czasie rzeczywistym
-
Zastosowania przemysłowe
- Dokładne mapowanie i nawigacja w złożonych środowiskach
- Wykrywanie i omijanie przeszkód w logistyce i magazynowaniu
- Inspekcja infrastruktury, takiej jak linie energetyczne i rurociągi
-
Zastosowania akademickie i edukacyjne
- Programowanie wtórne dla badań nad sztuczną inteligencją opartych na ROS
- Pokazy i eksperymenty laboratoryjne
- Szkolenie z zakresu autonomicznej nawigacji dronów
-
Rozwiązania dla inteligentnych miast
- Rekonstrukcja przestrzenna 3D na potrzeby planowania urbanistycznego
- Monitorowanie i zarządzanie ruchem
- Nadzór i analiza środowiskowa
-
Rozwój niestandardowy
- Prototypowanie dla specjalistycznych zastosowań przemysłowych
- Testowanie i integracja nowych komponentów sprzętowych i programowych
-
Reagowanie na katastrofy i monitorowanie środowiska
- Inspekcja i monitoring lotniczy w obszarach dotkniętych katastrofą
- Gromadzenie danych środowiskowych na potrzeby badań i kształtowania polityki
P600 zapewnia niezrównaną elastyczność i funkcjonalność, umożliwiając badaczom, inżynierom i deweloperom realizację złożonych projektów w różnych scenariuszach.
Related Collections







