








Комплект для разработки дрона CQ230 — Raspberry Pi 4B Pixhawk Ardupilot Промышленный программируемый комплект для самостоятельного изготовления дрона с открытым исходным кодом и стойкой для предотвращения столкновений
Комплект для разработки дрона CQ230 — Raspberry Pi 4B Pixhawk Ardupilot Промышленный программируемый комплект для самостоятельного изготовления дрона с открытым исходным кодом и стойкой для предотвращения столкновений
RCDrone
Не удалось загрузить сведения о доступности самовывоза
Обзор
Комплект для разработки сборочного дрона CQ230 — это компактный комплект с открытым исходным кодом. Самодельный дрон платформа, работающая на базе Raspberry Pi 4B и Пиксхок Контроллер полета. Этот дрон с колесной базой 230 мм, рамой для предотвращения столкновений и системой питания 4S (16,8 В) идеально подходит для обучения и экспериментов с программируемыми функциями с открытым исходным кодом. Платформа полностью оборудована для таких задач, как навигация по точкам маршрута, мониторинг данных и потоковая передача видео в реальном времени, что делает ее отличным выбором как для разработчиков, так и для новичков.
Основные характеристики
- Компактный дизайн: Имея размеры 360 мм x 360 мм x 300 мм, дрон идеально подходит для небольших помещений.
- Стойка для предотвращения столкновений: Полностью карбоновая рама для предотвращения столкновений обеспечивает долговечность и защиту.
- Интеграция Raspberry Pi 4B: Улучшено в Ubuntu 20.04 для бесперебойной работы и разработки.
- Фреймворк с открытым исходным кодом: Питаться от Ardupilot, поддерживающий Dronekit, MAVLink и ROS.
- Программируемый Задачи: Возможность автономной навигации, мониторинга данных в реальном времени и визуальной обработки.
- Навигация по точкам маршрута: Прокладывайте маршруты с точностью, основанной на GPS.
- Передача данных в реальном времени: Передача данных по WiFi на наземные станции.
- Визуальная навигация: Системы с двумя камерами для точной навигации в помещении и обхода препятствий.
- Программируемое управление: Используйте Dronekit-Python для создания пользовательских команд полета.
- Моделирование системы: Объедините моделирование SITL для бесперебойного тестирования функциональности.
Технические характеристики
| Параметр | Подробности |
|---|---|
| Модель | CQ230 |
| Колесная база | 230мм |
| Аккумулятор | 4S (16,8 В) |
| Время полета | 7 минут |
| Грузоподъемность | 200г |
| Сопротивление ветру | Уровень 3-4 |
| Максимальная скорость | 20 км/ч |
| Максимальная высота полета | 120м |
| Точность позиционирования | 2-3 м (GPS) |
| Масса | 612г |
| Диапазон дистанционного управления | 700м |
Упаковка
Базовая версия
- Контроллер полета Pixhawk 2.4.8 ×1
- M8N GPS ×1
- Модуль питания Ledi MINI PIX ×1
- Телеметрия WiFi CUAV ×1
- 30А ESC ×4
- 5045 Пропеллер ×4
- Рамка CQ230 ×1
- Балансировочное зарядное устройство A400 ×1
- Аккумулятор 4S 2300 мАч ×1
- 2205 Мотор ×4
- Пульт дистанционного управления FS-i6 ×1
- Сигнальный зуммер BB ×1
- Модуль оптического потока MF-01 ×1
Визуальная версия
- Пиксхок 2.4.8 Флайт Контроллер ×1
- М8Н GPS ×1
- Модуль питания Ledi MINI PIX ×1
- CS-камера ×1
- 30А ESC ×4
- 5045 Пропеллер ×4
- Рамка CQ230 ×1
- Сигнальный зуммер BB ×1
- Модуль оптического потока MF-01 ×1
- Балансировочное зарядное устройство A400 ×1
- Аккумулятор 4S 2300 мАч ×1
- 2205 Мотор ×4
- Пульт дистанционного управления FS-i6 ×1
- Бортовой компьютер Raspi 4B-4G ×1 комплект
- Визуальная камера T265 ×1
Приложения
- Доставка: Эффективная транспортировка легких грузов.
- Развитие образования: Идеально подходит для студентов и исследователей, желающих изучить беспилотные системы.
- Визуальная обработка: Используйте OpenCV для расширенной потоковой передачи и анализа видео.
- Навигационные эксперименты: Экспериментируйте с автономным отслеживанием полета и местоположения на основе GPS.
Дополнительные примечания
- Система включает Ubuntu 20.04 для улучшенного интерфейса программирования.
- Надежная экосистема Ardupilot обеспечивает масштабируемость и универсальность применения дронов.
- Полный комплект учебных материалов с обучающими материалами для новичков и профессионалов.
Подробности
Система беспилотных летательных аппаратов с открытым исходным кодом CQ230

Pixhawk: Аппаратная система дрона
Использует контроллер Pixhawk 2.4.8, оснащенный новым стандартным 32-битным процессором STM32F427 и работающий в паре с барометром 5611. Это экономичный контроллер с открытым исходным кодом и богатыми возможностями интерфейса.

ArduPilot: система программного обеспечения для дронов
Программное обеспечение дрона (по сути, прошивка управления) использует широко распространенный проект с открытым исходным кодом ArduPilot.
(ArduPilot представляет собой передовую, полнофункциональную и надежную систему программного обеспечения автопилота с открытым исходным кодом.)
Он может управлять всеми мыслимыми системами дронов. Для тех, кто любит технологии, дроны и исследования, понимание ArduPilot познакомит вас с увлекательным и захватывающим миром.

ArduPilot был установлен в более чем 1 000 000 беспилотных систем по всему миру. Оснащенный передовыми инструментами регистрации данных, анализа и моделирования, это тщательно протестированная и надежная система автопилота. Она также используется крупными организациями и компаниями, такими как NASA, Intel, Insitu, Boeing, а также многочисленными институтами и университетами по всему миру для тестирования и разработки.

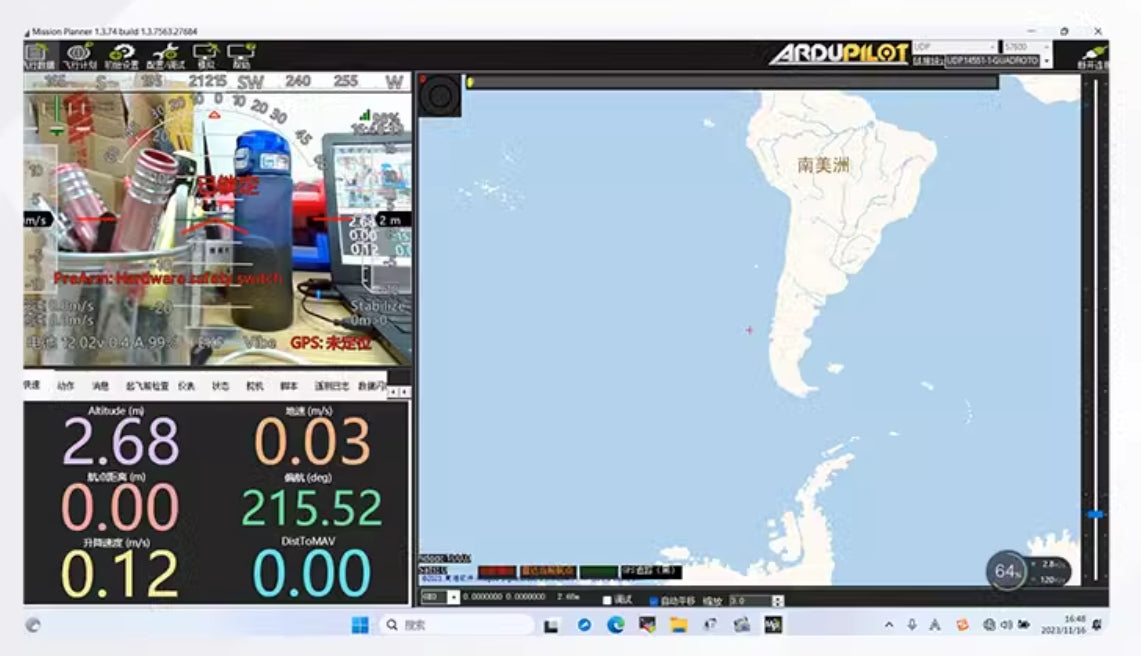
Наземная станция управления планировщиком миссий
Функции:
- Инструменты для настройки и установки параметров дронов;
- Устанавливайте траектории полета на картах, позволяя дронам автоматически следовать заданным маршрутам;
- Для управления дроном выберите команды миссии из выпадающих меню;
- Загружать и анализировать логи;
- Выполнять моделирование с использованием системы SITL (Software In The Loop);
- Вас ждут новые возможности, и на этом возможности не заканчиваются...


| Предопределенные функции | Базовая версия | Визуальная версия |
|---|
| Рисование линии | ✓ | ✓ |
| Удержание высоты, зависание, стабилизация | ✓ | ✓ |
| Возвращение домой, безопасное возвращение | ✓ | ✓ |
| Посадка, посадка из-за низкого заряда батареи | ✓ | ✓ |
| GPS-позиционирование на открытом воздухе и маршрут полета | ✓ | ✓ |
| Программируемое управление Dronekit-Python | ✓ | ✓ |
| Телеметрия WiFi для передачи данных в реальном времени (приблизительный радиус действия 5 м) | ✗ | ✓ |
| Оптическое позиционирование потока внутри помещения, лазерная фиксация высоты | ✓ | ✓ |
| Двойная визуальная навигация позиционирования в помещении, точки привязки MP, полет по маршруту, точная посадка с распознаванием QR-кода | ✗ | ✓ |
Подходит для полетов в помещении
Компактная конструкция с размерами 360 мм × 360 мм × 300 мм идеально подходит для работы в небольших помещениях.

Каркас из углеродного волокна, прочный и устойчивый к падениям

Конструкция кольца для предотвращения столкновений эффективно защищает двигатель и лопасти винта, обеспечивая безопасность полета;

Расширенные возможности расширения для многосценарной функциональной разработки
На основе базовой модели система добавляет Raspberry Pi 4B и интегрировала систему Raspberry Pi. Эта система включает в себя:
- Убунту 20.04 (операционная система с открытым исходным кодом и графическим интерфейсом)
- Dronekit-Python (библиотека Python для программирования управления дроном с помощью Dronekit)
- Pymavlink (реализация протокола MAVLink на языке Python, позволяющая программировать управление дроном с помощью Pymavlink)
- РОС (Операционная система робота)
- Маврос (протокол связи для управления дронами через ROS)
- Gstreamer (передача потокового видео с малой задержкой)
- Mavlink-маршрутизатор (распространяет данные контроллера полета MAVLink на различные конечные точки)
- OpenCV (библиотека программного обеспечения с открытым исходным кодом для обработки компьютерного зрения)

На основе вышеописанной системы дрон может достичь:
- Программируемое управление дроном с помощью Dronekit-Python
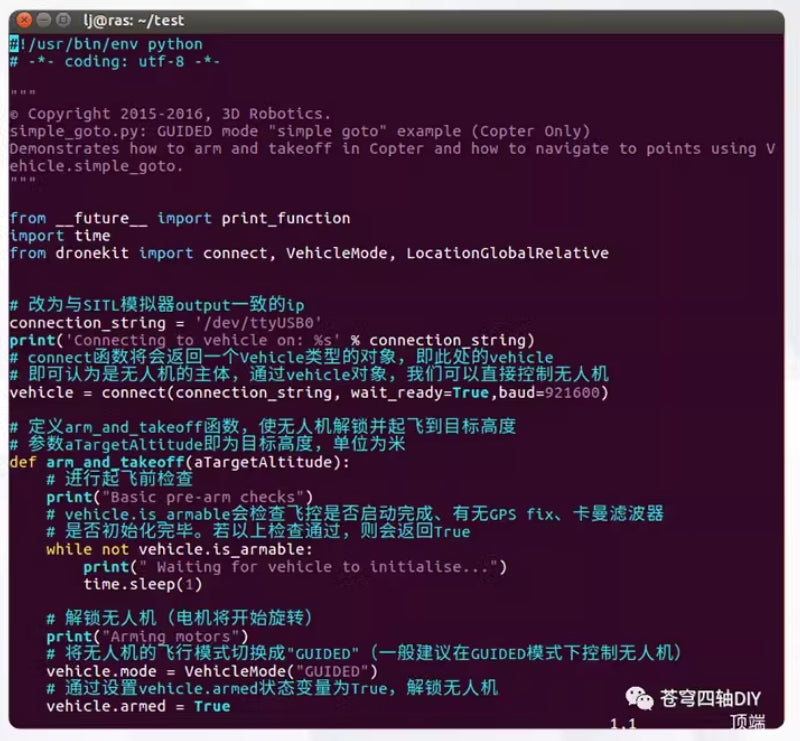
2. ОТКРЫТОЕ РЕЗЮМЕ Визуальная обработка
Добавлена камера CSI, обеспечивающая передачу изображений и их последующую обработку:
- Визуальные потоки можно захватывать с помощью Raspberry Pi и обрабатывать с помощью таких инструментов, как OpenCV.
- Потоки HD-видео в реальном времени также можно передавать обратно на ПК для обработки или отправлять на мобильное устройство для просмотра.

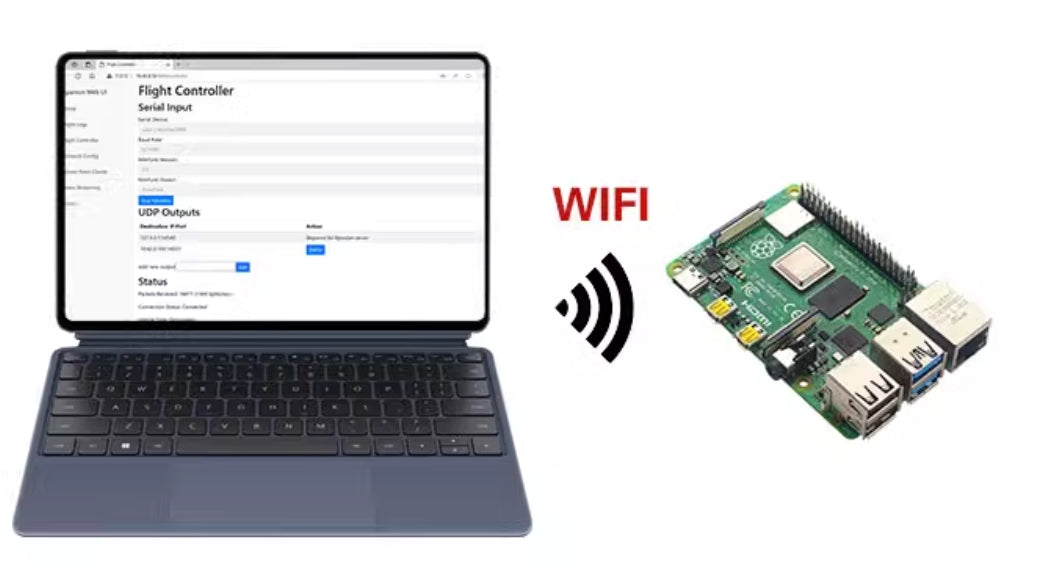
3. Передача HD-видео в реальном времени
4.Мониторинг данных наземной станции
Связь и передача изображений между сетью WiFi и наземной станцией ПК (MP) могут быть достигнуты без необходимости дополнительных модулей передачи. После того, как ПК подключается к точке доступа WiFi 4B, передача данных и изображений может быть инициирована путем доступа 10.42.0.10:3000 через веб-браузер.
5. Разработка дополнительных функций и проверка алгоритмов на основе вышеуказанной системы с открытым исходным кодом
Учебники, поддерживающие визуальную версию:
В дополнение к базовым обучающим материалам также предоставляются вводные обучающие материалы по визуальной обработке на Raspberry Pi.
Related Collections









