







P600 Drone Scientific Research Drone - ROS AI Experimentell Sekundär Programmering Industriell utvecklingsplattform Studio Lab Drone DIY Kit
P600 Drone Scientific Research Drone - ROS AI Experimentell Sekundär Programmering Industriell utvecklingsplattform Studio Lab Drone DIY Kit
RCDrone
Det gick inte att ladda hämtningstillgänglighet
Översikt
De P600 vetenskaplig forskningsdrönare är en banbrytande plattform designad för vetenskaplig forskning, industriell utveckling och AI-experiment. Utrustad med en högpresterande NVIDIA Jetson Orin NX datormodul, den levererar 100 TOPS datorkraft, vilket gör den idealisk för avancerade AI-applikationer. Denna drönare har en 40x optisk zoom kardankamera för högupplöst bildbehandling, 3D LiDAR SLAM för exakt kartläggning, och RTK positionering för noggrannhet på centimeternivå. Dess integrerad programvara Prometheus V2 och SpireCV vision bibliotek stödja sekundär programmering, vilket gör det till ett mångsidigt verktyg för utvecklare. Med en flygtid på upp till 21 minuter, a 600 mm diagonal axel, och en robust 4,05 kg startvikt, P600 är optimerad för dynamiska forsknings- och utvecklingsmiljöer.
Specifikationer
Flygplan
| Attribut | Detaljer |
|---|---|
| Typ av flygplan | Quadcopter |
| Startvikt | Ca. 4,05 kg (inklusive batteri) |
| Diagonalt axelavstånd | 600 mm |
| Mått | Längd 469 mm, Bredd 469 mm, Höjd 400 mm |
| Maximal svävtid | Ca. 21 min |
| Svävande noggrannhet | RTK: ±0,015 m (horisontell), ±0,01 m (vertikalt) 3D LiDAR SLAM: ±0,2 m (horisontell), ±0,1 m (vertikalt) |
| Driftstemperatur | 6°C ~ 40°C |
| Huvud MCU-chip | STM32H743VIT6 / 216 MHz / 2M programlagring / 512 KB datalagring |
| IMU | ICM20689 |
| Barometer | BMP388 |
| MTD | AT24C64 |
| I/O-gränssnitt | Inbyggd PX4IO-V2, stöder 8PWM-gränssnitt, 1RC-gränssnitt (stöder SBus, PPM, DSM) Externa gränssnitt: 3UART (GH1.25 6-stift), 1CAN (GH1.25 4-stift), Flight Control USB Interface (Typ-C) |
Dator ombord
| Attribut | Detaljer |
|---|---|
| Namn | Allspark-Orin NX inbyggd dator |
| Modell | IA160_V1 |
| Vikt | Ca. 188 g |
| Mått | 102,5 mm × 62,5 mm × 31 mm (inklusive fläkt) |
| Processor | NVIDIA Jetson Orin NX |
| Minne | 16 GB LPDDR5 |
| Datorkraft | 100 TOPPAR |
| GPU | Integrerad 32 tensorkärnor med 1024-kärnig NVIDIA Ampere-arkitektur GPU |
| CPU | 8-kärnig Arm® Cortex®-A78AE v8.2 64-bitars CPU (2MB L2 + 4MB L3) |
| SSD | 128 GB (M.2 gränssnitt, utbyggbart) |
| Ethernet | 100 Mbps x2 (1 dedikerad Ethernet-port, 1 utbytbar) |
| WiFi | 5G |
| Visa | Micro HDMI (1920*1080P) |
| USB-portar | USB2.0: Typ-A x1, Type-C x1 USB2.0: OTG x1 |
| Strömförsörjning | 10~26V vid 3A |
Ström batteri
| Attribut | Detaljer |
|---|---|
| Modell | LPB610HV |
| Kapacitet | 10 000 mAh |
| Batterivikt | 1,2 kg |
| Driftspänning | 22V~26,1V |
| Lagringsspänning | 23,1V |
| Mått | Längd 180 mm, Bredd 90 mm, Höjd 63 mm |
Fjärrkontroll
| Attribut | Detaljer |
|---|---|
| Modell | H16 |
| Kanaler | 16 |
| Frekvens | 2.400~2.483 GHz |
| Driftspänning | 4,2V |
| Batteri | 20 000 mAh |
| Laddningsport | Typ-C 9V-2A |
| Vikt | 1034 g |
| Mått | Längd 272 mm, Bredd 183 mm, Höjd 94 mm |
Kommunikationslänk
| Attribut | Detaljer |
|---|---|
| Modell | R16 |
| Kommunikationsavstånd | Ca. 600 meter, bandbredd 3,5 Mbps |
| Driftspänning | 7,2V~72V |
| Gränssnitt | 2UART, 1Ethernet, 1HDMI, 1Typ-C |
| Mått | Längd 76 mm, Bredd 69 mm, Höjd 11 mm |
Gimbal kamera
| Attribut | Detaljer |
|---|---|
| Modell | GX40 |
| Gimbal Dimensions | Längd 85,8 mm, Bredd 86 mm, Höjd 129,3 mm |
| GCU-mått | Längd 45,4 mm, Bredd 40 mm, Höjd 13,5 mm |
| Gimbal vikt | 405 g |
| GCU Vikt | 18,6 g |
| Driftspänning | 14V~53V |
| Streamingprotokoll | RTSP (standard) |
| Kodningsformat | H.264 / H.264H / H.264B / H.265 / MJPEG |
| Upplösning | - 4K30fps - 1080P@30fps - SCGA (12801024)@30fps <br> - 1.3M (1280960)@30fps - 720P@30fps |
| Bithastighet | 0,[email protected], 0,[email protected] |
Lins
| Attribut | Detaljer |
|---|---|
| Typ | Optisk zoomlins |
| Brännvidd | 4,8~48 mm |
| Bländare (F/NO) | f1.7~f3.2 |
| Diagonal FOV (D) | 67,2°~7,6° |
| Vertikal FOV (V) | 36,1°~3,7° |
| Horisontell FOV (H) | 60,2°~6,6° |
| Optisk zoomförhållande | 10x |
Bildsensor
| Attribut | Detaljer |
|---|---|
| Sensortyp | CMOS |
| Effektiva pixlar | 8,29 miljoner |
| Sensorstorlek | 1/2,8'' |
| Pixelstorlek | 1,45×1,45 (μm) |
| Elektronisk slutarhastighet | 1~1/30000s |
Illuminator
| Attribut | Detaljer |
|---|---|
| Typ | Laser |
| Våglängd | 850±10 nm |
| Driva | 0,8W |
| Belysningsavstånd | ≤200 m |
RTK
| Attribut | Detaljer |
|---|---|
| Modell | M15-RTK |
| Vikt | 90 g |
| Mått | Längd 80 mm, Bredd 50 mm, Höjd 20 mm |
| Satellittyper som stöds | BDS/GPS/GLONASS/QZSS |
| Strömförsörjning | 9~36V (12V rekommenderas) |
| Antennkontakt | SMA-F |
| Funktionella portar | UARTx2, CANx1, USB2.0x1 |
Laddare
| Attribut | Detaljer |
|---|---|
| Modell | C1-XR |
| AC Ingångsspänning | 100~240V |
| DC Ingångsspänning | 11~18V |
| Mått | Längd 130 mm, Bredd 115 mm, Höjd 61 mm |
| Vikt | 380 g |
| Laddningsström | 0.1A~10A |
| Battericeller som stöds | 1~6 celler |
3D LiDAR
| Attribut | Detaljer |
|---|---|
| Modell | MID360 |
| Laser våglängd | 905 nm |
| Detektionsområde | 40 m (vid 105 % reflektivitet) |
| Synfält (FOV) | Horisontell: 360°, Vertikal: -7°~52° |
| Minsta räckvidd | 0,1 m |
| Point Cloud Rate | 10 Hz (vanligt) |
| Poäng per sekund | 200 000 pts/s |
| Datagränssnitt | 100 BASE-TX Ethernet |
| Datasynkronisering | IEEE 1588-2008 (PTP v2), GPS |
| Intern IMU | ICM40609 |
| Strömförsörjning | 7~27V |
| Mått | 65 mm (B) x 65 mm (D) x 60 mm (H) |
| Vikt | 115 g |
| Driftstemperatur | -20°C ~ 55°C |
Programvaruparametrar
Dator ombord
| Attribut | Detaljer |
|---|---|
| Modell | Jetson Orin NX |
| Operativsystem | Ubuntu 20.04 |
| Användarnamn | amov |
| Lösenord | amov |
| L4T-version | 35.2.1 |
| Jetpack-version | 5.1 |
| CUDA-version | 11.4.315 |
| Realsense SDK | 2.50.0 |
| ROS-version | noetisk |
| OpenCV-version | 4.7.0 |
| Realsense ROS | 2.3.2 |
Paketlista
| Namn | Specifikation/modell | Kvantitet/Enhet |
|---|---|---|
| P600 huvudflygplan | P600-Allpark2-RTK-GX40-S3 | 1 set |
| M15-RTK Ground Terminal | M15-RTK | 1 st |
| GNSS svampantenn | Svampantenn | 1 st |
| GNSS-antennförlängningskabel | Antennförlängningskabel | 1 kabel |
| H16 fjärrkontroll | H16 | 1 enhet |
| 6S 10000mAh strömbatteri | 6S 10000mAh | 1 set |
| 3S 4000mAh litiumbatteri | 3S 4000mAh | 1 set |
| Smart balansladdare | C1-XR | 1 enhet |
| Nätverkskabel | 1,5 m | 1 kabel |
| Säkerhetsrep | 50 m | 1 paket |
| HDMI-fäste | / | 1 st |
| HDMI-adapterkabel | / | 1 st |
| Datorkonfiguration | / | 1 st |
| 2D släppplatta | 35×35 cm | 1 st |
| Flygfall | 740×540×510 mm | 1 set |
| Tillbehörskabelpaket | / | 1 paket |
| Certifikat | / | 1 ark |
| Checklista för funktionstest | / | 1 ark |
Detaljer
Prometheus 600 vetenskaplig forskningsplattform för utveckling av drönare
De Prometheus 600 vetenskaplig forskningsplattform för utveckling av drönare (kallad P600) är den fjärde generationens produkt i P600-serien. Den integrerar djupt två kärnteknologier, Prometheus och SpireCV, och är utrustad med en kardankamera med 40x optisk zoom. Denna inställning möjliggör upptäckt och spårning av långdistansmål, autonom landning från höga höjder och flygkryssningsuppdrag.
Systemet stöder 3D LiDAR SLAM med Fast-lio, för att uppnå 3D SLAM-mappning med hög precision. Dessutom har den EGO-Swarm multi-agent samarbetsalgoritm, vilket tillåter tillämpningar i olika scenarier som inomhus och utomhus 3D rumslig rekonstruktion och undvikande av hinder under dronenavigering.
Dessa avancerade funktioner kompletteras av Prometheus professionell markstation, som ger visuell feedback i realtid, driftövervakning och dynamisk parameterjustering, vilket gör det lättare för utvecklare att bemästra och accelerera sekundär utveckling.

Tre versioner av P600 Drone

Flexibel kontroll av den optisk-elektroniska kardan
GX40 kardankamera stöder multi-scenariokontroll och integrerar kedjebaserad fjärrkontroll för att möjliggöra målsökning under waypointnavigering. Med hjälp av SpireCV vision bibliotek, det underlättar detektering och spårning av mål, vilket uppnår realtidslåsning av kardan på målet.
- Nattbelysning
- Måldetektion och spårning

Målklick och spårning
Med hjälp av YOLOv5-detekteringsalgoritm och med COCO:s universella datauppsättning upptäcks och spåras mål. De Nanotrack-spårningsalgoritm låser sig vid utvalda mål för spårning. Utan förändringar i förhållandena kan mål upp till 30 meter bort identifieras och spåras. Genom 40x optisk zoom och elektronisk zoom, uppnås måldetektering och spårning på långa avstånd. Under drönarspårning kan Prometheus professionell markstation möjliggör dynamiska avståndsbaserade målspårningsväxlar (standard är 10 meter).
- Spårning på 30m
- Spårning på 20m
- Spårning på 10m

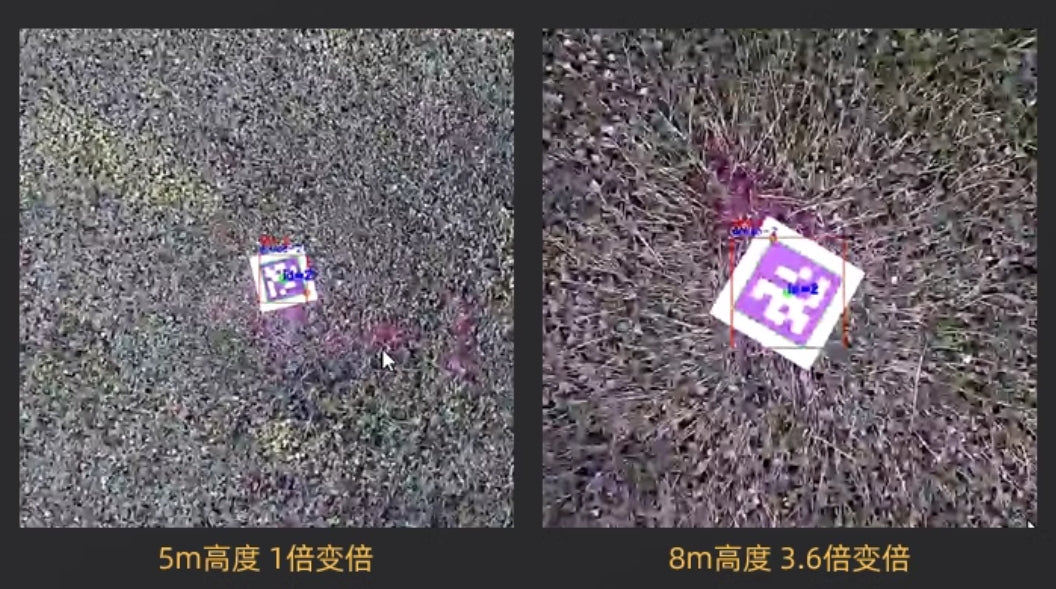
QR-kod guidad landning
Med hjälp av SpireCV vision bibliotek, exakt detektering och positionsuppskattning av QR-koder uppnås. GX40 kan utföra precisionsstyrd landning på QR-koder från olika höjder. Kardankamerans mitt är i linje med mitten av QR-koden inom en felmarginal på 30 cm.
- 5m höjd, 1x zoom
- 8m höjd, 3,6x zoom
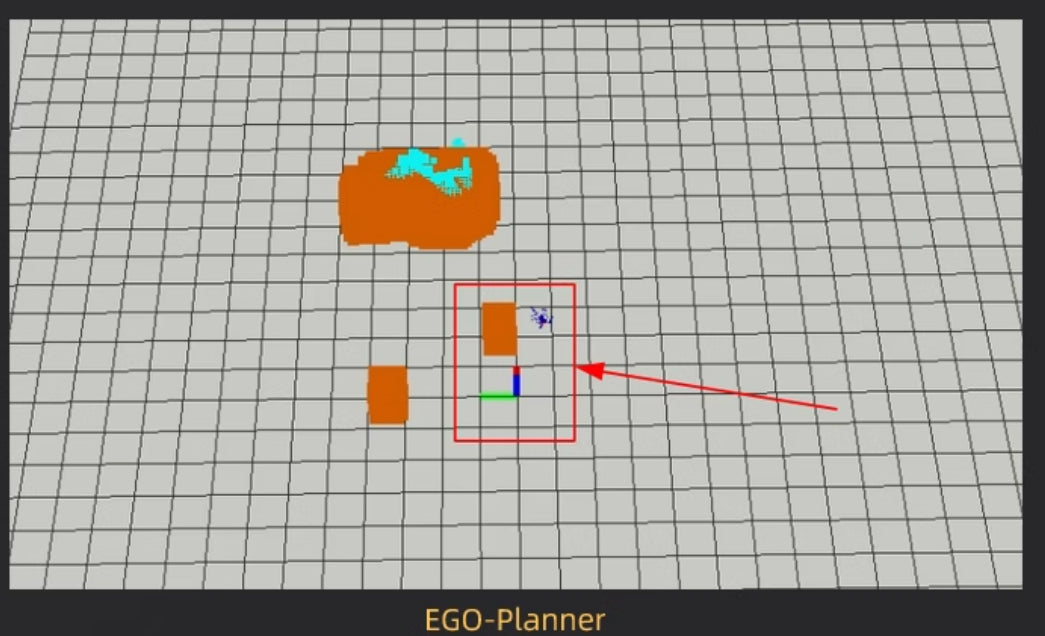
EGO-planerare
Stöder EGO-Planner vägplaneringsalgoritm och tillhandahåller Octomap kartläggningsalgoritm. I kombination med den professionella markstationen möjliggör den autonom 3D dynamisk vägplanering.
Stabila och pålitliga drönarkontrollapplikationer
P600-drönaren är utrustad med högprecisions RTK-utrustning, vilket uppnår högprecisionssvävning utomhus med horisontell precision upp till 1 cm och vertikal precision upp till 1,5 cm. I kombination med Prometheus mjukvarusystem kontrollmodul, det möjliggör exakt drönarkontroll.
Drönarkontrollmodulen fungerar som en "brygga" mellan mjukvaruprogram och drönaren, och tillhandahåller flera kontrolltillstånd som svävande startposition, aktuell positionssvävning, landning och rörelse. Dessa inkluderar sex kontrolllägen: vanligt systemposition, hastighet, integrerad kontroll av position och hastighet, och bankontrollläge. Totalt erbjuder den sju kontrolllägen.

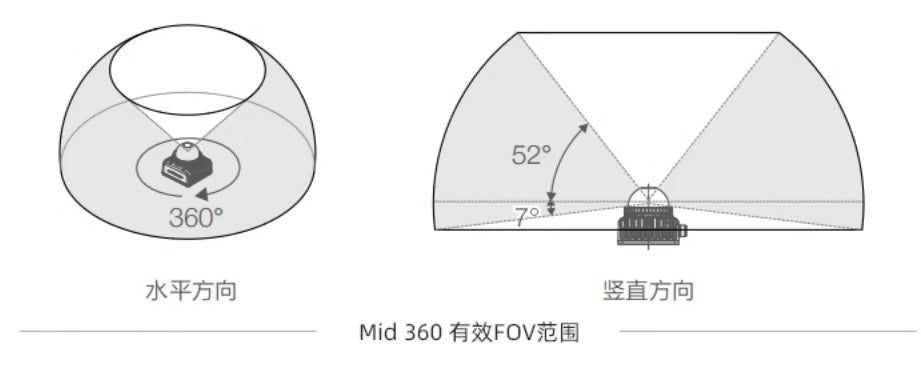
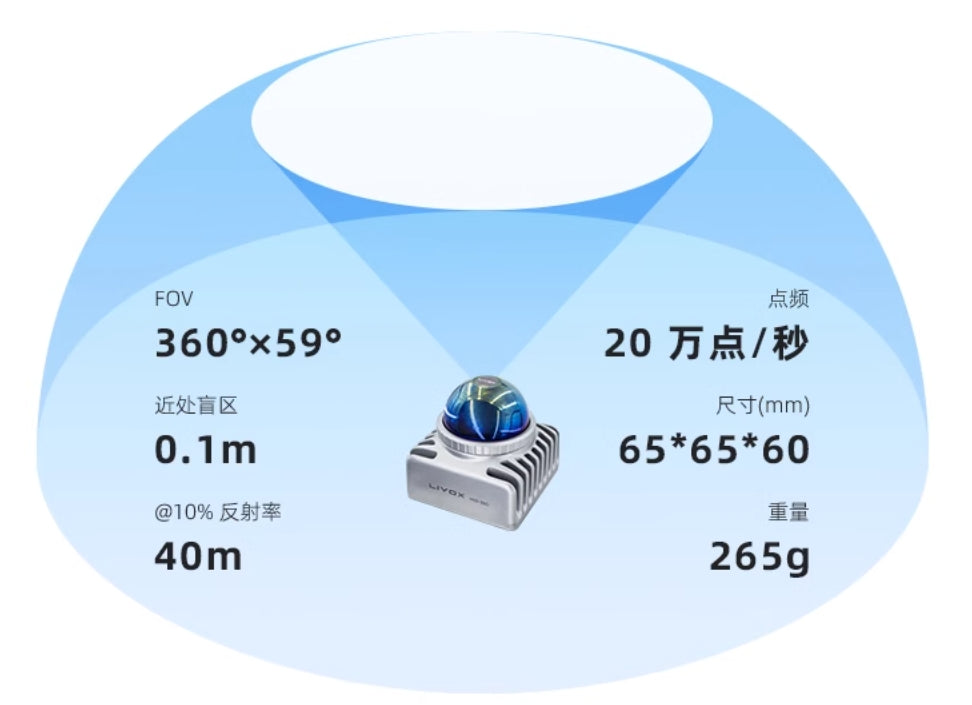
3D LiDAR Mid-360
- Låg blindzon | Brett synfält | Applikation för flera scenarier
De Mitten av 360 funktioner a 360° horisontell FOV och a maximal vertikal FOV på 59°. När målobjektets reflektionsförmåga är 10 % kan det maximala detektionsområdet nå 40 meter, och blindzonens intervall är så litet som 10 meter. Den anpassar sig till olika komplexa miljöer som svagt ljus och starkt ljus.
Utrustad med Mid-360-modulen P600 drönare uppnår en panoramatäckning av den blinda zonen, vilket säkerställer sömlös drift för drönare över flera scenarier.
- Diagrambeskrivningar:
- Horisontell riktning: 360°
- Vertikal riktning: 52° maximalt FOV

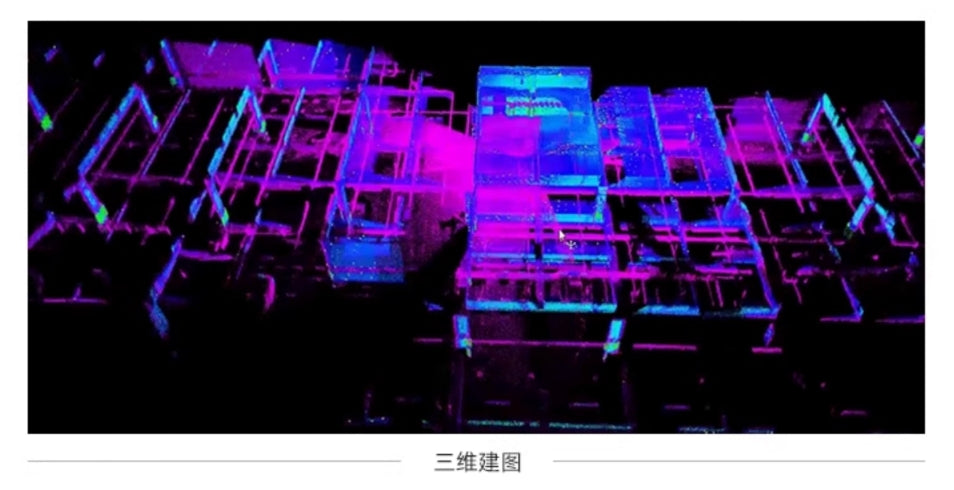
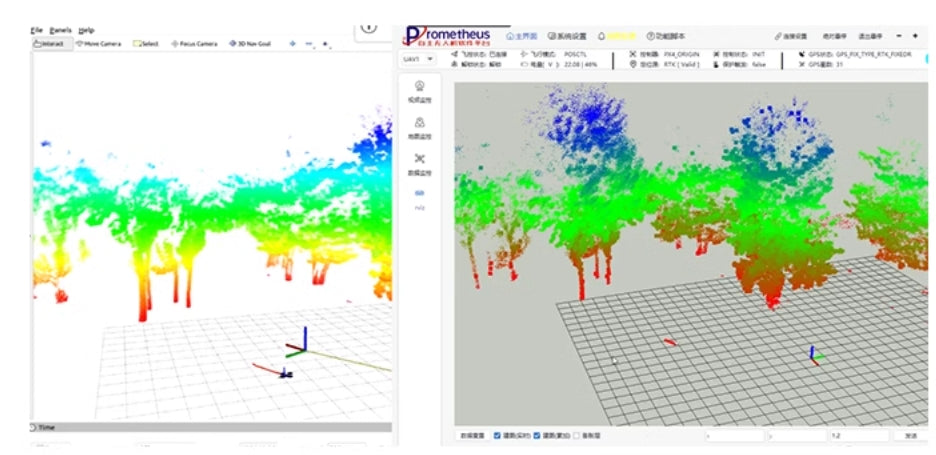
Snabb och exakt 3D-miljökartläggning
De P600 drönare är utrustad med avancerade miljöavkänningsfunktioner, vilket gör att den snabbt kan samla in omgivande miljödata under flygning. Dessa data bearbetas i realtid för att generera en 3D miljökarta, ger exakt rumslig medvetenhet och navigeringsstöd för olika uppgifter.
EGO-Svärmvägsplanering för navigering och undvikande av hinder
De Mitten av 360 publicerar punktmolndata och platsdata, kombinerat med EGO-Svärm vägplaneringsalgoritm, vilket avsevärt förbättrar drönarens förmåga att autonomt anpassa sig till dynamiska miljöförändringar. Den kan analysera och reagera i realtid på hinder under rörelse och dynamiskt justera spårningsmålet med en maximal hastighet på 2 m/s. Detta säkerställer exceptionell flexibilitet och anpassningsförmåga i okända och komplexa driftsscenarier.
Denna funktion förbättrar avsevärt drönarens uppgiftseffektivitet, vilket gör att den effektivt och exakt kan utföra en mängd olika uppgifter
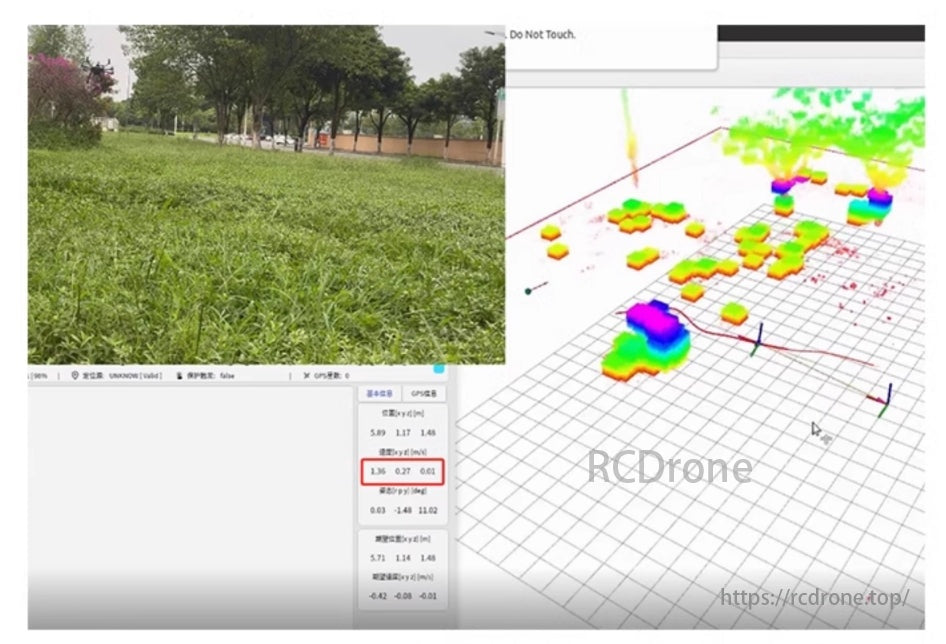
Prometheus Professional Ground Station Drone Interaction
- Interaktion med markstation
Detta visar upp gränssnittet och interaktionsmöjligheterna hos Prometheus professionell markstation, vilket möjliggör sömlös kommunikation och drift med drönaren genom 3D-miljökartläggning.
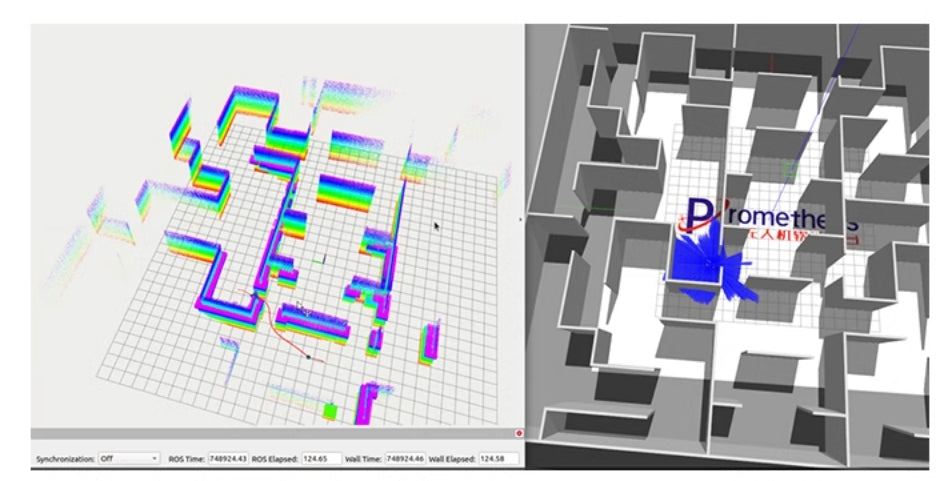
Demo av integrerad simuleringsfunktion
- Simulerad 3D LiDAR SLAM och EGO-Swarm Path Planning
Detta illustrerar simuleringen av 3D LiDAR SLAM och EGO-Svärm vägplanering inom en strukturerad miljö, som visar upp systemets möjligheter i en kontrollerad demo.
Hårdvarufunktioner
Drönarram
De Kedway DP1000 drönarplattform av industriell kvalitet använder en FOC (fältorienterad kontroll) kraftsystem, som gör att motorn kan rotera stabilt, med lågt brus, hög effektivitet och snabb dynamisk respons. Hela drönarsystemet uppnår ett "färdigt"-tillstånd med utmärkt hårdvarukvalitet, vilket säkerställer stabil flygprestanda. Det stödjer ultralång uthållighet (70 minuter utan nyttolast), medan P600 drönare kräver ungefär 24 minuter för stabilisering under positionering.

Kraftfull datorenhet
- Allspark Micro Edge Computing Unit, utrustad med NVIDIA Orin NX-modul, tillhandahållande 100 TOPS flyttals beräkningskraft.
- Kompakt storlek, lätt, stark systemkompatibilitet och GPU-accelererad högpresterande datoranvändning.
- Förinstallerad med alla utvecklingsmiljöer, redo att användas, vilket förbättrar sekundär utvecklingseffektivitet.
- Mått: 102,5 mm × 62.5 mm × 31 mm

Integrerad bildöverföringskontroll
En drönarfjärrkontroll av industriell kvalitet kombinera data, bild och kontroll i ett.
- Frekvensband: 2,4-2,483 GHz
- Maximalt överföringsavstånd: 30 km
- Bildkvalitet: 1080P
- Batteritid: 8-15 timmars kontinuerlig drift
Under drönardrift kan användare övervaka drönarinformation i realtid, se kamerafilmer och samtidigt styra drönaren med joysticken, vilket säkerställer en fullständigt visualiserad flygoperation.

Dubbelantenn med hög precision RTK
Drönaren är utrustad med en RTK-GNSS positioneringsmodul, som använder snabb bärarfas differentiell positioneringsteknik och flervägsundertryckningsalgoritmer för att tillhandahålla positioneringsnoggrannhet på centimeternivå för drönare. Den kan samtidigt ta emot RTCM-data från flera markbaserade referensstationer, som stöder korta, medelstora och långa baslinje-RTK-beräkningar.
Med ett inbyggt flerspråk Web GUI, det möjliggör nolltröskelkonfiguration och visualiserad datavisning och uppgraderingsprocesser. Mottagaren har också ett användarvänligt gränssnitt för webbkonfiguration, vilket avsevärt sänker driftsbarriären. Den erbjuder rika gränssnitt och kan anpassas till olika applikationsscenarier, vilket ger exceptionell prestanda i exakt positionering.

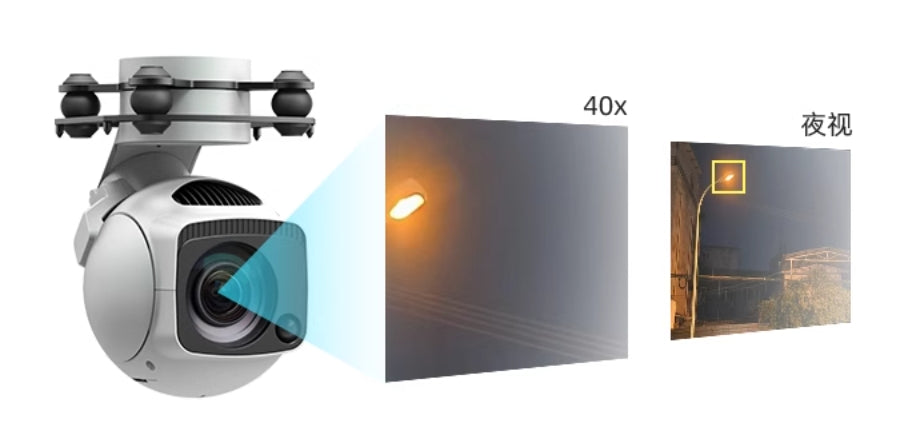
40x optisk-elektronisk kardan
Utrustad med en högprecisions 3-axlig icke-ortogonal kardan, har den en 8,29 megapixel 10x optisk zoomkamera kombinerat med digital zoomteknik, som uppnår upp till 40x förstoring. Den kan mata ut 4K@30FPS video streamar över nätverket. Dessutom är den utrustad med en laserbelysningsmodul, vilket möjliggör tydliga bilder även i helt mörka miljöer.
MID 360 3D LiDAR
Mid-360 är en kostnadseffektiv, säker och pålitlig laserdetekterings- och avståndssensor. Det används ofta inom områden som logistikrobotar, industrirobotar och smarta städer, och stödjer funktioner som kartläggning, positionering, identifiering och undvikande av hinder. Mid-360 kan upptäcka föremål så nära som 0,1 meter och så långt som 100 meter. Den har kompakt storlek, brett synfält, hög upplösning, hög tillförlitlighet och en integrerad IMU.
Specifikationer:
- FOV: 360° × 59°
- Minsta detektionsavstånd: 0,1 m
- Räckvidd (@10 % reflektivitet): 40 m
- Punktfrekvens: 200 000 poäng/sekund
- Mått (mm): 65 × 65 × 60
- Vikt: 265 g
Programvarufunktioner
Programvaran Prometheus V2
Utvecklingsplattformen är baserad på ROS och Prometheus open source-ramverk, och erbjuder rika funktionaliteter och ett stort antal sekundära utvecklingsgränssnitt för effektiv anpassning. Den tillhandahåller gränssnitt för UAV-tillstånd och sensordata, inklusive platsinformation, flyglägen, batteristatus och IMU. Dessutom erbjuder den kontrollgränssnitt för position, hastighet, acceleration och attityd, samt exempelprogram för användning av utvecklingsgränssnitt. UAV:en inkluderar också inbyggda flygsäkerhetsinspektionsfunktioner (inte undvikande av hinder), vilket möjliggör automatisk landning i onormala situationer för att minska kraschriskerna, vilket gör utvecklingen säkrare.

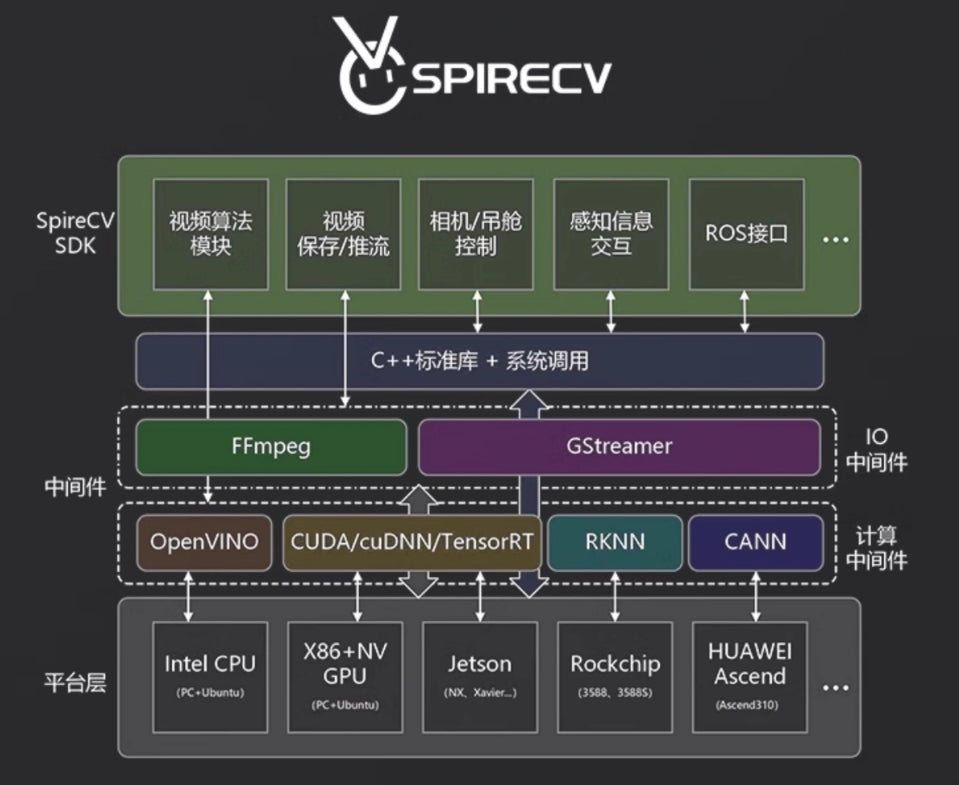
SpireCV Vision Library
Baserat på SpireCV vision-biblioteket är detta en inbyggd realtidsbearbetnings-SDK för bilder som utformats specifikt för intelligenta obemannade system. Dess huvudsakliga funktioner inkluderar gimbal/kamerakontroll, videolagring, streaming, måldetektering, igenkänning och spårning. Det syftar till att förse utvecklare av intelligenta obemannade system med högpresterande, mycket pålitliga, enkla och funktionsrika synbehandlingsmöjligheter. Denna modell stöder YOLO-träning för peka-och-klicka fordonsspårningsfunktioner.
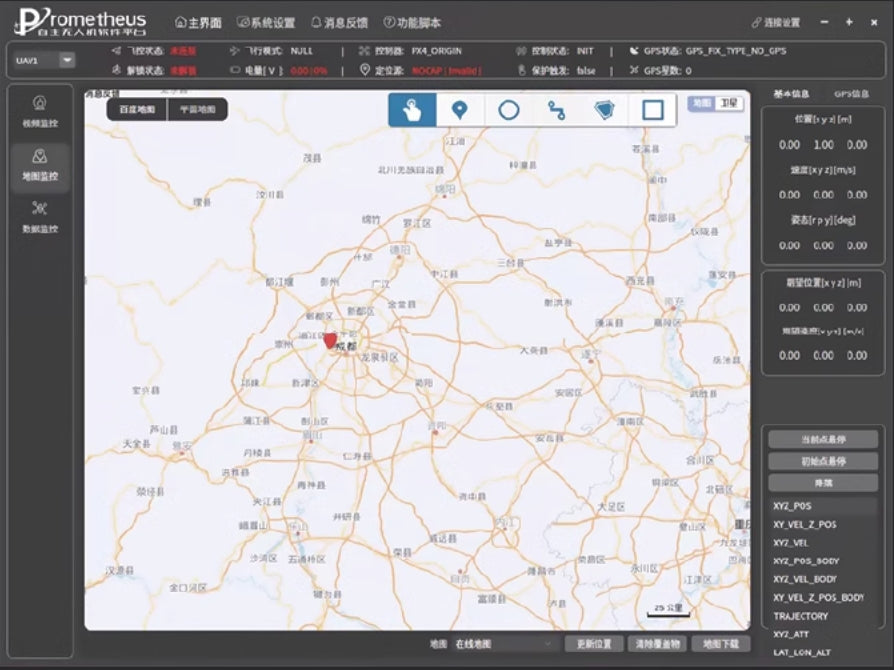
Prometheus markstationssystem
Prometheus markstation är ett människa-maskin-gränssnitt utvecklat med Qt, baserat på Prometheus-systemet. Den använder TCP/UDP-kommunikation för att förenkla konfigurationen av multimaskinkommunikation. Markstationen gör det möjligt för användare att snabbt replikera olika funktioner i Prometheus-systemet, vilket ger realtidsövervakning av UAV-status, såväl som funktioner som start, landning och positionskontroll med ett klick.
Ansökningar
-
Vetenskaplig forskning och AI-utveckling
- AI-algoritmtestning
- Avancerad sensordataanalys
- Bildbehandling och spårning i realtid
-
Industriella applikationer
- Precisionskartläggning och navigering i komplexa miljöer
- Hinderdetektering och undvikande inom logistik och lager
- Inspektion av infrastruktur såsom kraftledningar och rörledningar
-
Akademiska och pedagogiska användningar
- Sekundär programmering för ROS-baserad AI-forskning
- Laboratoriedemonstrationer och experiment
- Utbildning i autonom drone-navigering
-
Smarta stadslösningar
- 3D rumslig rekonstruktion för stadsplanering
- Trafikövervakning och trafikledning
- Övervakning och miljöanalys
-
Anpassad utveckling
- Prototypframställning för specialiserade industriella tillämpningar
- Testning och integration av nya hård- och mjukvarukomponenter
-
katastrofinsatser och miljöövervakning
- Flyginspektion och övervakning i katastrofdrabbade områden
- Insamling av miljödata för forskning och beslutsfattande
P600 ger oöverträffad flexibilitet och funktionalitet, vilket gör det möjligt för forskare, ingenjörer och utvecklare att utföra komplexa projekt i olika scenarier.
Related Collections







