







Drone ya P600 Drone ya Utafiti wa Kisayansi - ROS AI ya Majaribio ya Programu ya Sekondari ya Jukwaa la Maendeleo ya Viwanda Studio Lab Drone DIY Kit
Drone ya P600 Drone ya Utafiti wa Kisayansi - ROS AI ya Majaribio ya Programu ya Sekondari ya Jukwaa la Maendeleo ya Viwanda Studio Lab Drone DIY Kit
RCDrone
Couldn't load pickup availability
Muhtasari
The Drone ya Utafiti wa Kisayansi ya P600 ni jukwaa la kisasa lililoundwa kwa ajili ya utafiti wa kisayansi, maendeleo ya viwanda na majaribio ya AI. Vifaa na utendaji wa juu Moduli ya kompyuta ya NVIDIA Jetson Orin NX, inatoa 100 TOPS nguvu ya kompyuta, na kuifanya kuwa bora kwa matumizi ya hali ya juu ya AI. Ndege hii isiyo na rubani ina a 40x zoom ya macho kamera ya gimbal kwa picha zenye azimio la juu, 3D LiDAR SLAM kwa ramani sahihi, na Nafasi ya RTK kwa usahihi wa kiwango cha sentimita. Yake programu iliyounganishwa ya Prometheus V2 na Maktaba ya maono ya SpireCV saidia programu ya upili, na kuifanya kuwa zana inayotumika kwa wasanidi programu. Kwa muda wa ndege hadi Dakika 21, a 600 mm mhimili wa diagonal, na imara Uzito wa kilo 4.05, P600 imeboreshwa kwa mazingira ya utafiti na maendeleo yenye nguvu.
Vipimo
Ndege
| Sifa | Maelezo |
|---|---|
| Aina ya Ndege | Quadcopter |
| Uzito wa Kuondoka | Takriban. 4.05 kg (pamoja na betri) |
| Umbali wa Mhimili wa Ulalo | 600 mm |
| Vipimo | Urefu 469 mm, Upana 469 mm, Urefu 400 mm |
| Muda wa Juu wa Kuelea | Takriban. Dakika 21 |
| Usahihi wa Kuelea | RTK: ±0.015 m (mlalo), ±0.01 m (wima) 3D LiDAR SLAM: ±0.2 m (mlalo), ±0.1 m (wima) |
| Joto la Uendeshaji | 6°C ~ 40°C |
| Chip kuu ya MCU | STM32H743VIT6 / 216 MHz / 2M hifadhi ya programu / hifadhi ya data ya KB 512 |
| IMU | ICM20689 |
| Barometer | BMP388 |
| MTD | AT24C64 |
| Violesura vya I/O | PX4IO-V2 iliyojengwa ndani, inasaidia 8Miingiliano ya PWM, 1Kiolesura cha RC (inasaidia SBus, PPM, DSM) Violesura vya nje: 3UART (GH1.25 6-pini), 1CAN (GH1.25 4-pini), Kiolesura cha USB cha Kudhibiti Ndege (Aina-C) |
Kompyuta ya Onboard
| Sifa | Maelezo |
|---|---|
| Jina | Kompyuta ya Onboard ya Allspark-Orin NX |
| Mfano | IA160_V1 |
| Uzito | Takriban. 188 g |
| Vipimo | 102.5 mm × 62.5 mm × 31 mm (pamoja na feni) |
| Kichakataji | NVIDIA Jetson Orin NX |
| Kumbukumbu | GB 16 LPDDR5 |
| Nguvu ya Kompyuta | 100 TOP |
| GPU | Mihimili 32 ya Tensor iliyojumuishwa ya usanifu wa 1024-msingi wa NVIDIA Ampere GPU |
| CPU | 8-core Arm® Cortex®-A78AE v8.2 64-bit CPU (2MB L2 + 4MB L3) |
| SSD | GB 128 (M.2 kiolesura, kinachoweza kupanuka) |
| Ethaneti | 100 Mbps x2 (mlango 1 maalum wa Ethaneti, 1 inayoweza kubadilishwa) |
| WiFi | 5G |
| Onyesho | HDMI Ndogo (1920*1080P) |
| Bandari za USB | USB2.0: Aina-A x1, Aina-C x1 USB2.0: OTG x1 |
| Ugavi wa Nguvu | 10~26V @ 3A |
Betri ya Nguvu
| Sifa | Maelezo |
|---|---|
| Mfano | Sehemu ya LPB610HV |
| Uwezo | 10000 mAh |
| Uzito wa Betri | 1.2 kg |
| Voltage ya Uendeshaji | 22V~26.1V |
| Voltage ya Uhifadhi | 23.1V |
| Vipimo | Urefu 180 mm, upana 90 mm, urefu 63 mm |
Kidhibiti cha Mbali
| Sifa | Maelezo |
|---|---|
| Mfano | H16 |
| Vituo | 16 |
| Mzunguko | GHz 2.400~2.483 |
| Voltage ya Uendeshaji | 4.2V |
| Betri | 20000 mAh |
| Kuchaji Bandari | Aina-C 9V-2A |
| Uzito | 1034 g |
| Vipimo | Urefu 272 mm, Upana 183 mm, Urefu 94 mm |
Kiungo cha Mawasiliano
| Sifa | Maelezo |
|---|---|
| Mfano | R16 |
| Umbali wa Mawasiliano | Takriban. Mita 600, kipimo data 3.5 Mbps |
| Voltage ya Uendeshaji | 7.2V~72V |
| Violesura | 2UART, 1Ethaneti, 1HDMI, 1Aina-C |
| Vipimo | Urefu 76 mm, upana 69 mm, urefu 11 mm |
Kamera ya Gimbal
| Sifa | Maelezo |
|---|---|
| Mfano | GX40 |
| Vipimo vya Gimbal | Urefu 85.8 mm, Upana 86 mm, Urefu 129.3 mm |
| Vipimo vya GCU | Urefu 45.4 mm, Upana 40 mm, Urefu 13.5 mm |
| Uzito wa Gimbal | 405 g |
| Uzito wa GCU | 18.6 g |
| Voltage ya Uendeshaji | 14V~53V |
| Itifaki ya Utiririshaji | RTSP (chaguo-msingi) |
| Umbizo la Usimbaji | H.264 / H.264H / H.264B / H.265 / MJPEG |
| Azimio | - 4K30fps - 1080P@30fps - SCGA (12801024)@30fps <br> - 1.3M (1280960)@30fps - 720P@30fps |
| Bitrate | [email protected], [email protected] |
Lenzi
| Sifa | Maelezo |
|---|---|
| Aina | Lenzi ya kukuza macho |
| Urefu wa Kuzingatia | 4.8 ~ 48 mm |
| Kitundu (F/NO) | f1.7~f3.2 |
| FOV ya Ulalo (D) | 67.2°~7.6° |
| FOV ya Wima (V) | 36.1°~3.7° |
| FOV ya Mlalo (H) | 60.2°~6.6° |
| Uwiano wa Kuza wa Macho | 10x |
Sensor ya Picha
| Sifa | Maelezo |
|---|---|
| Aina ya Sensor | CMOS |
| Pixels Ufanisi | 8.29M |
| Ukubwa wa Sensor | 1/2.8'' |
| Ukubwa wa Pixel | 1.45×1.45 (μm) |
| Kasi ya Shutter ya Kielektroniki | 1 ~ 1/30000s |
Mwangaza
| Sifa | Maelezo |
|---|---|
| Aina | Laser |
| Urefu wa mawimbi | 850±10 nm |
| Nguvu | 0.8W |
| Umbali wa Mwangaza | ≤200 m |
RTK
| Sifa | Maelezo |
|---|---|
| Mfano | M15-RTK |
| Uzito | 90 g |
| Vipimo | Urefu 80 mm, upana 50 mm, urefu 20 mm |
| Aina za Satelaiti Zinazotumika | BDS/GPS/GLONASS/QZSS |
| Ugavi wa Nguvu | 9~36V (12V inapendekezwa) |
| Kiunganishi cha Antena | SMA-F |
| Bandari zinazofanya kazi | UARTx2, CANx1, USB2.0x1 |
Chaja
| Sifa | Maelezo |
|---|---|
| Mfano | C1-XR |
| Voltage ya Kuingiza ya AC | 100~240V |
| Voltage ya Kuingiza ya DC | 11 ~ 18V |
| Vipimo | Urefu 130 mm, Upana 115 mm, Urefu 61 mm |
| Uzito | 380 g |
| Inachaji ya Sasa | 0.1A~10A |
| Seli za Betri Zinazotumika | Seli 1 ~ 6 |
3D LiDAR
| Sifa | Maelezo |
|---|---|
| Mfano | MID360 |
| Laser Wavelength | 905 nm |
| Masafa ya Ugunduzi | 40 m (katika uakisi wa 105%) |
| Sehemu ya Maoni (FOV) | Mlalo: 360°, Wima: -7°~52° |
| Kiwango cha chini cha Masafa | 0.1 m |
| Kiwango cha Kiwango cha Wingu | 10 Hz (kawaida) |
| Pointi kwa Sekunde | 200,000 pts/s |
| Data Interface | 100 BASE-TX Ethernet |
| Usawazishaji wa Data | IEEE 1588-2008 (PTP v2), GPS |
| IMU ya ndani | ICM40609 |
| Ugavi wa Nguvu | 7 ~ 27V |
| Vipimo | 65 mm (W) x 65 mm (D) x 60 mm (H) |
| Uzito | 115 g |
| Joto la Uendeshaji | -20°C ~ 55°C |
Vigezo vya Programu
Kompyuta ya Onboard
| Sifa | Maelezo |
|---|---|
| Mfano | Jetson Orin NX |
| Mfumo wa Uendeshaji | Ubuntu 20.04 |
| Jina la mtumiaji | amov |
| Nenosiri | amov |
| Toleo la L4T | 35.2.1 |
| Toleo la Jetpack | 5.1 |
| Toleo la CUDA | 11.4.315 |
| Realsense SDK | 2.50.0 |
| Toleo la ROS | noetic |
| Toleo la OpenCV | 4.7.0 |
| Realsense ROS | 2.3.2 |
Orodha ya Vifurushi
| Jina | Uainishaji/Mfano | Kiasi/Kitengo |
|---|---|---|
| Ndege kuu ya P600 | P600-Allpark2-RTK-GX40-S3 | seti 1 |
| Kituo cha chini cha M15-RTK | M15-RTK | kipande 1 |
| Antena ya Uyoga ya GNSS | Antenna ya Uyoga | kipande 1 |
| Cable ya Upanuzi wa Antena ya GNSS | Cable ya Upanuzi wa Antena | kebo 1 |
| Kidhibiti cha Mbali cha H16 | H16 | 1 kitengo |
| Betri ya Nguvu ya 6S 10000mAh | 6S 10000mAh | seti 1 |
| 3S 4000mAh Betri ya Lithium | 3S 4000mAh | seti 1 |
| Smart Kusawazisha Charger | C1-XR | 1 kitengo |
| Cable ya Mtandao | 1.5 m | 1 kebo |
| Kamba ya Usalama | 50 m | 1 kifurushi |
| Mabano ya HDMI | / | kipande 1 |
| Kebo ya Adapta ya HDMI | / | kipande 1 |
| Usanidi wa Kompyuta | / | kipande 1 |
| Bamba la Kudondosha la 2D | 35 × 35 cm | kipande 1 |
| Kesi ya Usafiri wa Anga | 740×540×510 mm | seti 1 |
| Kifurushi cha Cable cha nyongeza | / | 1 kifurushi |
| Cheti | / | karatasi 1 |
| Orodha ya Mtihani wa Kazi | / | karatasi 1 |
Maelezo
Jukwaa la Maendeleo la Utafiti wa Kisayansi la Prometheus 600
The Jukwaa la Maendeleo la Utafiti wa Kisayansi la Prometheus 600 (inayorejelewa kama P600) ni bidhaa ya kizazi cha nne katika safu ya P600. Inaunganisha kwa undani teknolojia mbili za msingi, Prometheus na SpireCV, na ina kamera ya gimbal ya zoom ya 40x. Mipangilio hii huwezesha ugunduzi na ufuatiliaji wa shabaha ya umbali mrefu, kutua kwa uhuru kutoka miinuko ya juu, na safari za angani.
Mfumo huu unaauni 3D LiDAR SLAM na Haraka-lio, kufikia usahihi wa juu wa ramani ya 3D SLAM. Kwa kuongeza, ina sifa ya Algorithm ya ushirikiano wa wakala wengi wa EGO-Swarm, kuruhusu programu katika matukio mbalimbali kama vile ujenzi upya wa anga wa ndani na nje wa 3D na kuepuka vizuizi wakati wa kusogeza kwa ndege zisizo na rubani.
Uwezo huu wa hali ya juu unakamilishwa na Kituo cha kitaalamu cha Prometheus, ambayo hutoa maoni ya kuona ya wakati halisi, ufuatiliaji wa utendakazi, na urekebishaji wa vigezo vinavyobadilika, na hivyo kurahisisha wasanidi programu kufahamu na kuharakisha maendeleo ya pili.

Toleo la Tatu la P600 Drone

Udhibiti Rahisi wa Gimbal ya Optical-Electronic
Kamera ya GX40 ya gimbal inaauni udhibiti wa hali nyingi na inaunganisha udhibiti wa mbali unaotegemea mnyororo ili kuwezesha utafutaji lengwa wakati wa kusogeza kwa njia. Kwa kutumia Maktaba ya maono ya SpireCV, hurahisisha ugunduzi na ufuatiliaji wa malengo, kufikia kufungwa kwa wakati halisi kwa gimbal kwenye lengo.
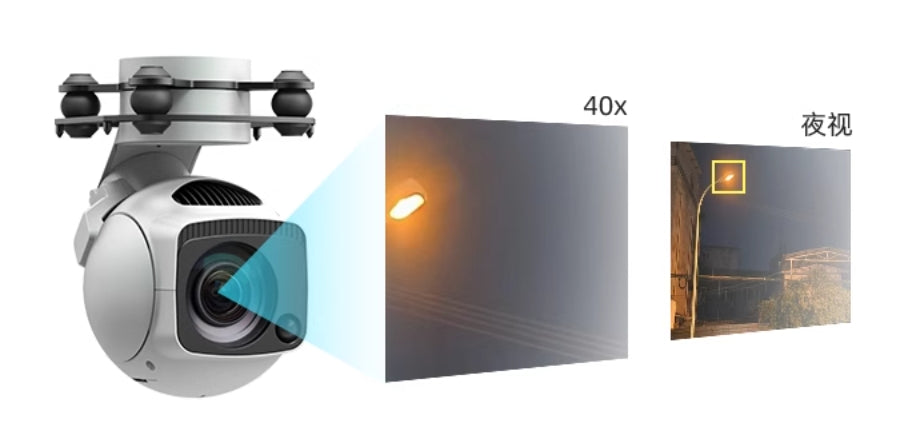
- Mwangaza wa Usiku
- Utambuzi na Ufuatiliaji Lengwa

Kubofya na Kufuatilia Lengwa
Kwa kutumia Algorithm ya kugundua YOLOv5 na kutumia mkusanyiko wa data wa COCO, shabaha hugunduliwa na kufuatiliwa. The Algorithm ya ufuatiliaji wa Nanotrack hufunga kwenye shabaha zilizochaguliwa kwa ufuatiliaji. Bila mabadiliko katika hali, malengo ya hadi mita 30 yanaweza kutambuliwa na kufuatiliwa. Kupitia 40x zoom ya macho na zoom ya elektroniki, utambuzi na ufuatiliaji wa lengo la umbali mrefu hupatikana. Wakati wa ufuatiliaji wa drone, Kituo cha kitaalamu cha Prometheus inaruhusu swichi zinazobadilika za kufuatilia lengwa za umbali (chaguo-msingi ni mita 10).
- Kufuatilia kwa 30m
- Kufuatilia kwa 20m
- Kufuatilia kwa 10m

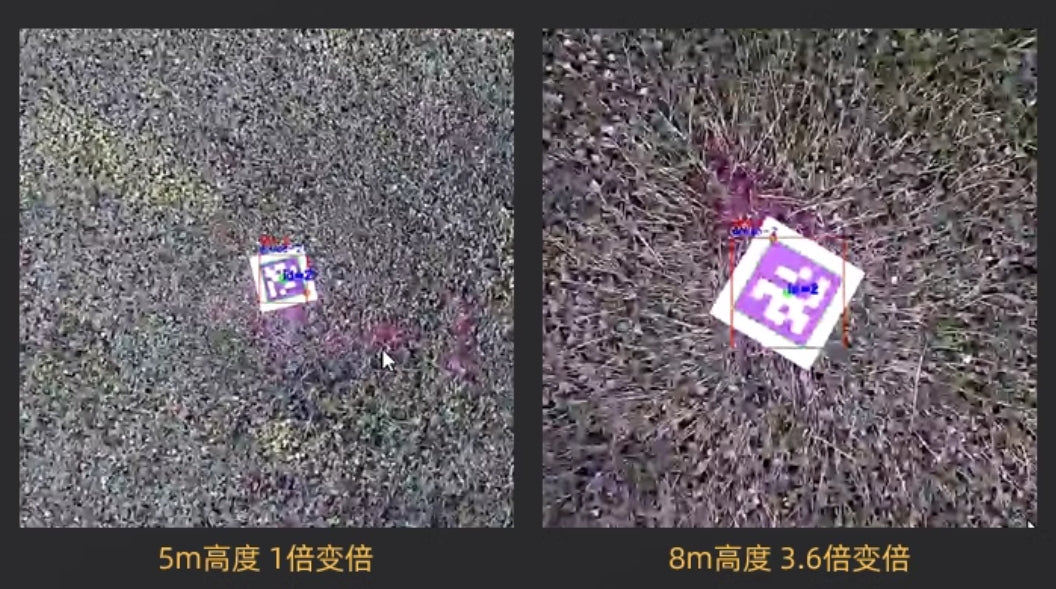
Kutua kwa Kuongozwa kwa Msimbo wa QR
Kwa kutumia Maktaba ya maono ya SpireCV, utambuzi sahihi na ukadiriaji wa nafasi ya misimbo ya QR hupatikana. GX40 inaweza kutua kwa kuongozwa kwa usahihi kwenye misimbo ya QR kutoka miinuko tofauti. Katikati ya kamera ya gimbal inalingana na katikati ya msimbo wa QR ndani ya ukingo wa makosa ya 30 cm.
- Mwinuko wa 5m, Kuza 1x
- Mwinuko wa 8m, Kuza 3.6x
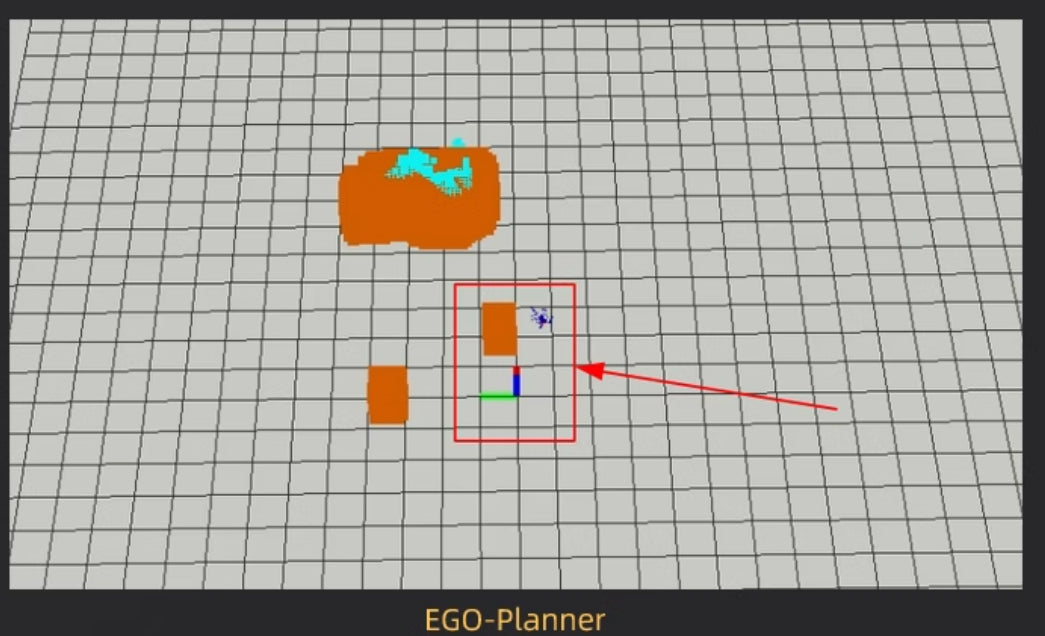
EGO-Mpangaji
Inasaidia Algorithm ya kupanga njia ya EGO-Mpangaji na hutoa Algorithm ya ramani ya octomap. Ikiunganishwa na kituo cha kitaalamu cha ardhini, huwezesha upangaji wa njia ya 3D inayojiendesha.
Maombi ya Udhibiti wa Drone Imara na ya Kutegemewa
Ndege isiyo na rubani ya P600 ina vifaa vya usahihi wa hali ya juu vya RTK, ikipata usahihi wa hali ya juu kuelea nje kwa usahihi wa mlalo hadi sm 1 na usahihi wima hadi sm 1.5. Pamoja na Moduli ya kudhibiti mfumo wa programu ya Prometheus, inawezesha udhibiti sahihi wa drone.
Moduli ya udhibiti wa drone hufanya kama "daraja" kati ya programu za programu na drone, ikitoa hali nyingi za udhibiti kama vile nafasi ya awali ya kuelea, nafasi ya sasa ya kuelea, kutua, na harakati. Hizi ni pamoja na njia sita za udhibiti: nafasi ya mfumo wa kawaida, kasi, udhibiti jumuishi wa nafasi na kasi, na hali ya udhibiti wa trajectory. Kwa jumla, inatoa njia saba za udhibiti.

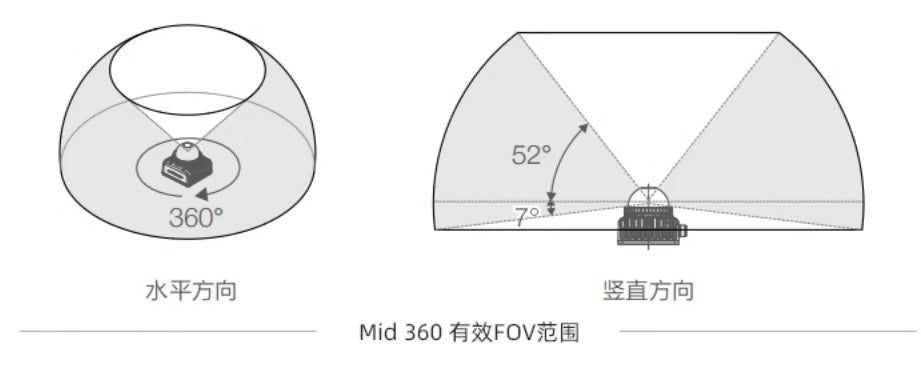
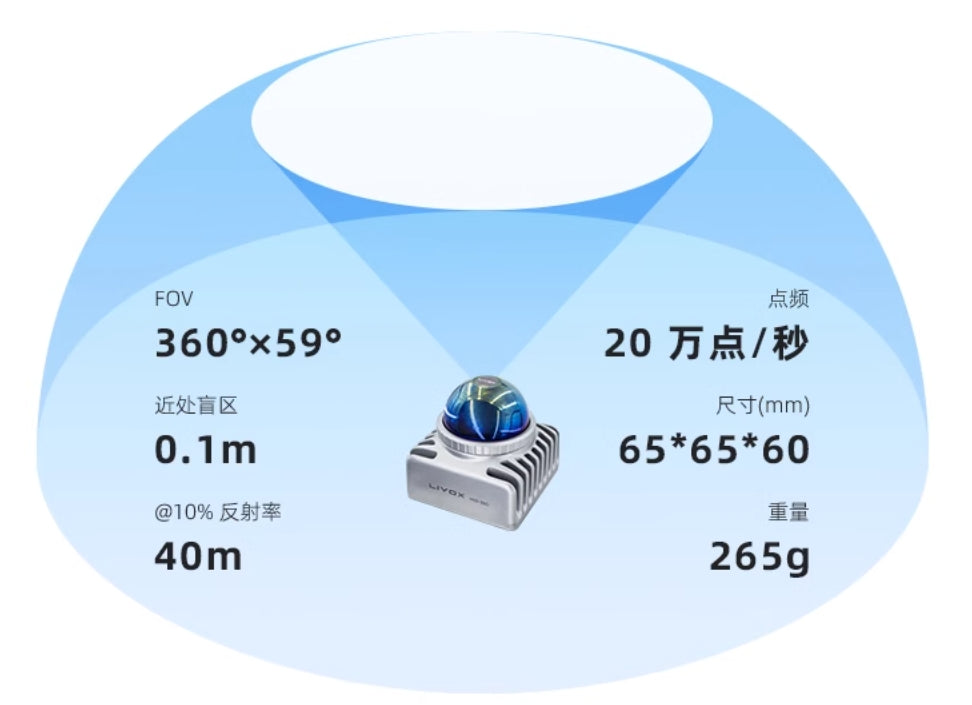
3D LiDAR Katikati ya 360
- Eneo la Upofu | Sehemu pana ya Maoni | Utumizi wa Hali nyingi
The Kati ya 360 vipengele a FOV ya mlalo ya 360° na a FOV ya juu zaidi ya wima ya 59°. Wakati uakisi wa kitu kinacholengwa ni 10%, upeo wa juu wa ugunduzi unaweza kufikia mita 40, na safu ya ukanda wa vipofu ni ndogo kama mita 10. Inabadilika kuendana na mazingira changamano mbalimbali kama vile mwanga mdogo na mwanga mkali.
Iliyo na moduli ya Mid-360, the Ndege isiyo na rubani ya P600 inafanikisha ufunikaji wa mandhari ya ukanda wa vipofu, na kuhakikisha utendakazi usio na mshono wa ndege zisizo na rubani katika mazingira ya hali nyingi.
- Maelezo ya Mchoro:
- Mwelekeo wa Mlalo: 360 °
- Mwelekeo wa Wima: 52° upeo wa juu wa FOV

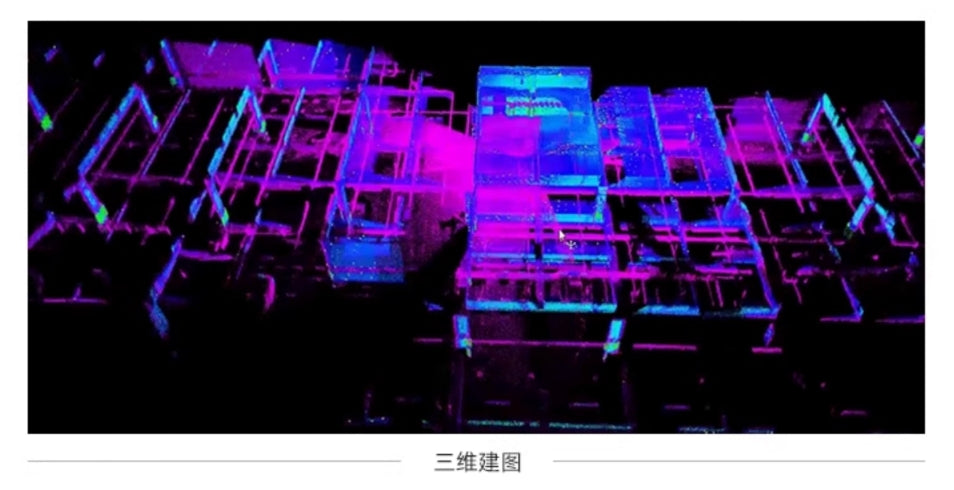
Ramani ya Mazingira ya 3D ya Haraka na Sahihi
The Ndege isiyo na rubani ya P600 ina uwezo wa hali ya juu wa kuhisi mazingira, na kuiruhusu kukusanya kwa haraka data ya mazingira inayozunguka wakati wa kukimbia. Data hii inachakatwa kwa wakati halisi ili kutoa a Ramani ya mazingira ya 3D, kutoa ufahamu sahihi wa anga na usaidizi wa urambazaji kwa kazi mbalimbali.
Upangaji wa Njia ya EGO-Swarm kwa Urambazaji na Kuepuka Vikwazo
The Kati ya 360 huchapisha data ya uhakika ya wingu na data ya eneo, pamoja na Algorithm ya kupanga njia ya EGO-Swarm, ikiboresha kwa kiasi kikubwa uwezo wa ndege isiyo na rubani kuzoea mabadiliko yanayobadilika ya mazingira. Inaweza kuchanganua na kujibu kwa wakati halisi vikwazo wakati wa harakati na kurekebisha kwa nguvu lengo la ufuatiliaji kwa kasi ya juu ya 2 m/s. Hii inahakikisha kubadilika na kubadilika kwa kipekee katika hali zisizojulikana na ngumu za kiutendaji.
Kipengele hiki huboresha sana ufanisi wa kazi wa drone, kuiwezesha kukamilisha kazi mbalimbali kwa ufanisi na kwa usahihi.
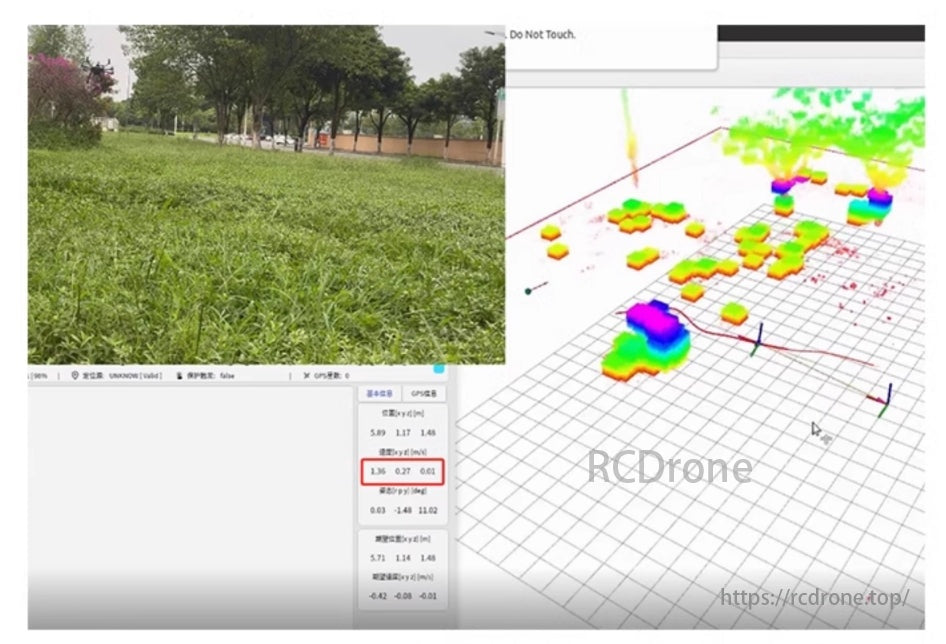
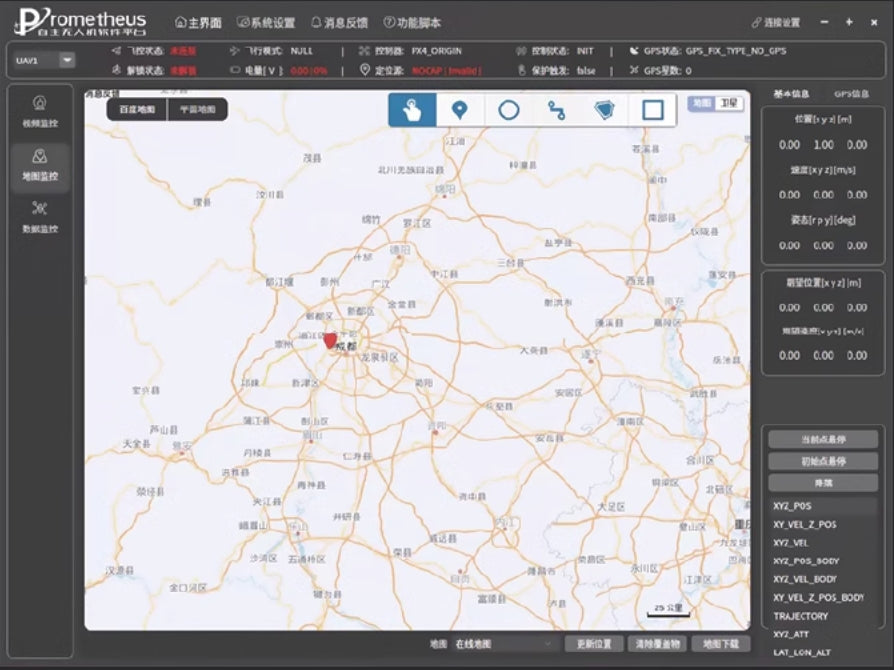
Prometheus Professional Ground Station Mwingiliano Drone
- Mwingiliano wa Kituo cha chini
Hii inaonyesha kiolesura na uwezo wa mwingiliano wa Kituo cha kitaalamu cha Prometheus, kuwezesha mawasiliano na uendeshaji usio na mshono na drone kupitia ramani ya mazingira ya 3D.
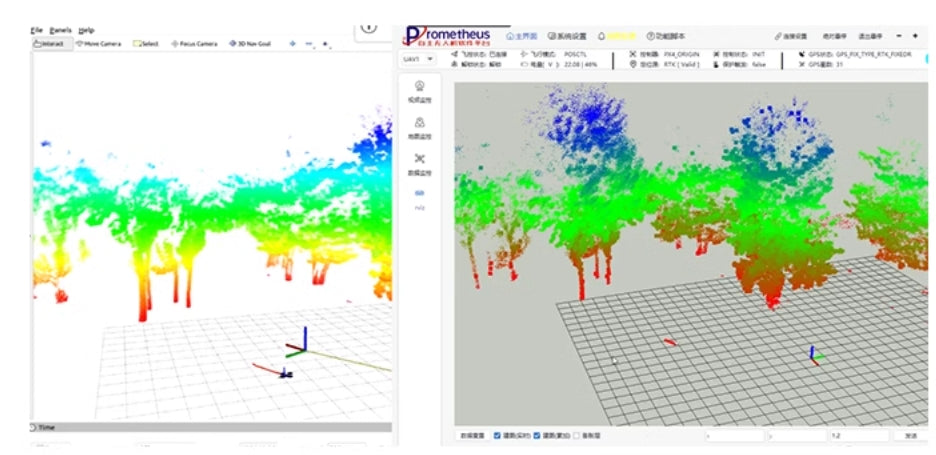
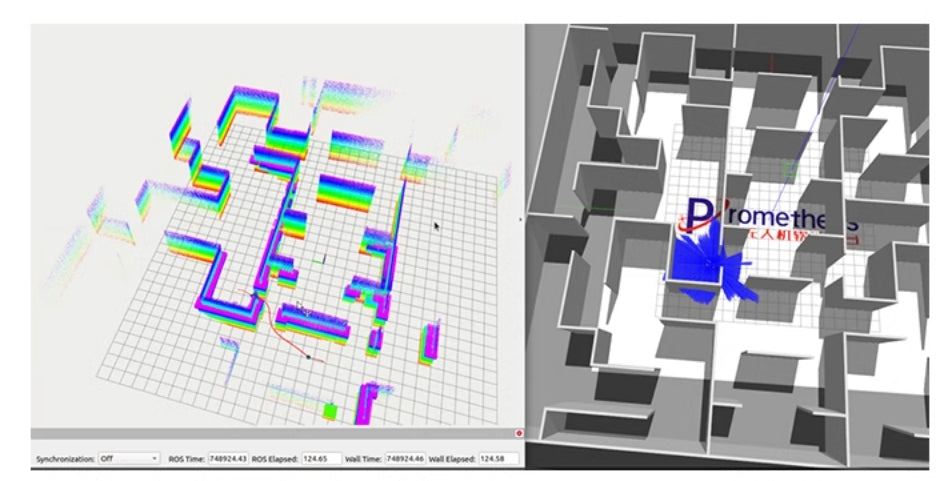
Onyesho Jumuishi la Kazi ya Uigaji
- Simulizi ya 3D LiDAR SLAM na Upangaji wa Njia ya EGO-Swarm
Hii inaonyesha uigaji wa 3D LiDAR SLAM na Upangaji wa njia ya EGO-Swarm ndani ya mazingira yaliyopangwa, inayoonyesha uwezo wa mfumo katika onyesho linalodhibitiwa.
Vipengele vya Vifaa
Fremu ya Drone
The Njia ya DP1000 jukwaa la drone za kiwango cha viwanda hutumia a FOC (Udhibiti Unaolenga Shamba) mfumo wa nguvu, unaowezesha motor kuzunguka kwa utulivu, kwa kelele ya chini, ufanisi wa juu, na majibu ya haraka ya nguvu. Mfumo mzima wa ndege zisizo na rubani hufikia hali ya "tayari-kuruka" na ubora bora wa maunzi, kuhakikisha utendakazi thabiti wa ndege. Inasaidia uvumilivu wa muda mrefu (dakika 70 bila mzigo), wakati Ndege isiyo na rubani ya P600 inahitaji takriban Dakika 24 kwa utulivu wakati wa kuweka nafasi.

Kitengo chenye Nguvu cha Kompyuta
- Kitengo cha Kompyuta cha Allspark Micro Edge, iliyo na vifaa vya Moduli ya NVIDIA Orin NX, kutoa Nguvu 100 za juu za kompyuta za kuelea.
- Ukubwa ulioshikana, uzani mwepesi, utangamano thabiti wa mfumo, na Kompyuta iliyoharakishwa ya utendaji wa juu wa GPU.
- Imesakinishwa mapema na mazingira yote ya uendelezaji, tayari kutumika, na kuimarisha ufanisi wa pili wa maendeleo.
- Vipimo: 102.5 mm × 62.5 mm × 31 mm

Kidhibiti Kina cha Usambazaji wa Picha
An kidhibiti cha mbali cha drone ya daraja la viwanda kuchanganya data, picha, na udhibiti katika moja.
- Mkanda wa Marudio: 2.4-2.483 GHz
- Umbali wa Juu wa Usambazaji: kilomita 30
- Ubora wa Picha: 1080P
- Maisha ya Betri: Masaa 8-15 ya operesheni inayoendelea
Wakati wa operesheni ya ndege isiyo na rubani, watumiaji wanaweza kufuatilia taarifa za wakati halisi za ndege isiyo na rubani, kutazama picha za kamera, na wakati huo huo kudhibiti ndege isiyo na rubani kwa kutumia kijiti cha kufurahisha, kuhakikisha utendaji wa ndege unaoonekana kikamilifu.

RTK ya Antena mbili ya Usahihi wa Juu
Drone ina vifaa vya Moduli ya kuweka nafasi ya RTK-GNSS, ambayo hutumia teknolojia ya uwekaji tofauti ya awamu ya mtoa huduma na kanuni za ukandamizaji wa njia nyingi ili kutoa usahihi wa nafasi ya sentimeta kwa ndege zisizo na rubani. Inaweza kupokea wakati huo huo data ya RTCM kutoka kwa vituo vingi vya marejeleo vya msingi, kusaidia hesabu fupi, za kati na ndefu za msingi za RTK.
Na lugha nyingi iliyojengwa ndani GUI ya Wavuti, huwezesha usanidi wa kizingiti-sifuri na uonyeshaji wa data unaoonekana na michakato ya kuboresha. Mpokeaji pia ana kiolesura cha usanidi cha ukurasa wa wavuti kinachofaa mtumiaji, na hivyo kupunguza kwa kiasi kikubwa kizuizi cha uendeshaji. Inatoa miingiliano tajiri na inaweza kubadilika kwa hali mbalimbali za programu, ikitoa utendaji wa kipekee katika nafasi sahihi.

Gimbal ya 40x ya Optical-Electronic
Ikiwa na usahihi wa juu wa gimbal ya mhimili 3 isiyo ya orthogonal, ina kamera ya kukuza macho ya 8.29-megapixel 10x pamoja na teknolojia ya kukuza dijiti, inayofikia ukuzaji wa 40x. Inaweza kutoa 4K@30FPS video inatiririka kwenye mtandao. Zaidi ya hayo, ina vifaa vya moduli ya kuangaza laser, kuwezesha picha wazi hata katika mazingira ya giza kabisa.
MID 360 3D LiDAR
Mid-360 ni ya gharama nafuu, salama, na ugunduzi wa leza unaotegemewa na kihisi cha kuanzia. Inatumika sana katika nyanja kama vile roboti za vifaa, roboti za viwandani, na miji mahiri, kusaidia utendakazi kama vile uchoraji wa ramani, uwekaji nafasi, utambulisho, na kuepuka vikwazo. Mid-360 inaweza kugundua vitu vilivyo karibu kama mita 0.1 na hadi mita 100. Inaangazia saizi ndogo, uwanja mpana wa maoni, azimio la juu, kuegemea juu, na IMU iliyojumuishwa.
Vipimo:
- FOV: 360 × 59°
- Umbali wa Chini wa Utambuzi: mita 0.1
- Masafa (@10% Kuakisi): 40 m
- Mzunguko wa Pointi: pointi 200,000/sekunde
- Vipimo (mm): 65 × 65 × 60
- Uzito: 265 g
Vipengele vya Programu
Mfumo wa Programu ya Prometheus V2
Jukwaa la maendeleo linatokana na ROS na mfumo wa chanzo-wazi wa Prometheus, unaotoa utendakazi tajiri na idadi kubwa ya miingiliano ya maendeleo ya upili kwa ubinafsishaji bora. Inatoa miingiliano ya hali ya UAV na data ya kihisi, ikijumuisha maelezo ya eneo, hali ya ndege, hali ya betri na IMU. Zaidi ya hayo, inatoa violesura vya udhibiti kwa nafasi, kasi, kasi, na mtazamo, pamoja na programu za mfano za matumizi ya kiolesura cha ukuzaji. UAV pia inajumuisha vipengele vya ukaguzi wa usalama wa ndege vilivyojengewa ndani (sio kuepusha vizuizi), kuwezesha kutua kiotomatiki katika hali zisizo za kawaida ili kupunguza hatari za ajali, na kufanya maendeleo kuwa salama zaidi.

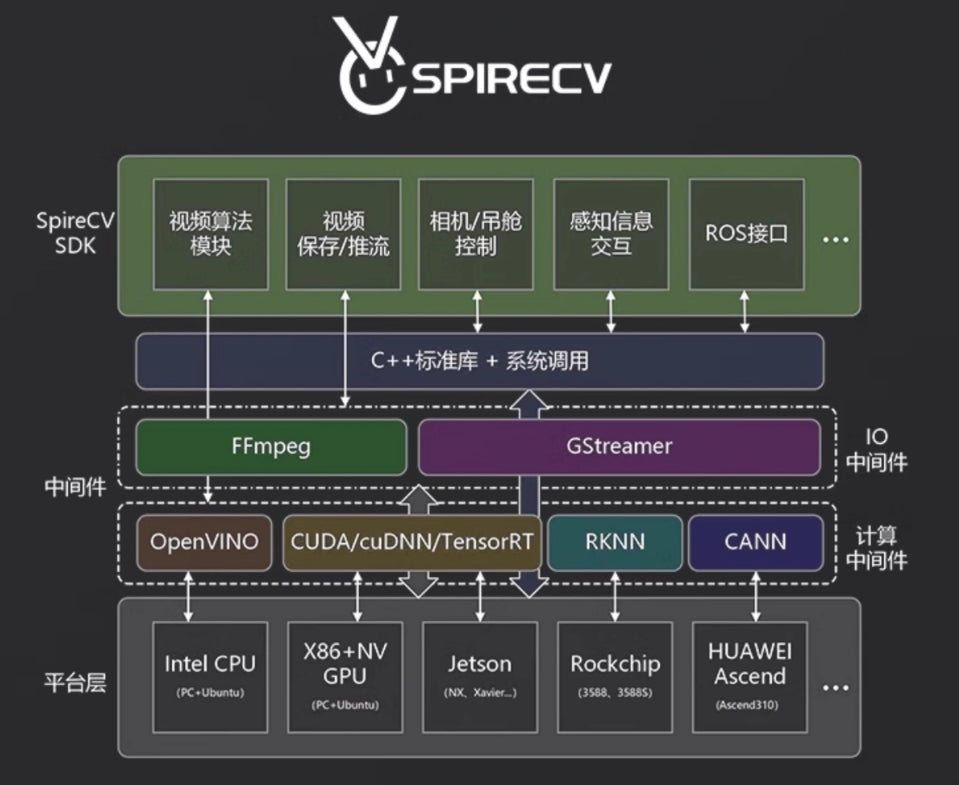
Maktaba ya Maono ya SpireCV
Kulingana na maktaba ya maono ya SpireCV, hii ni SDK ya kuchakata picha kwenye wakati halisi iliyoundwa mahususi kwa mifumo mahiri isiyo na rubani. Vipengele vyake kuu ni pamoja na udhibiti wa gimbal/kamera, uhifadhi wa video, utiririshaji, utambuzi wa lengo, utambuzi na ufuatiliaji. Inalenga kuwapa wasanidi programu wa mifumo ya akili isiyo na rubani yenye utendakazi wa hali ya juu, unaotegemewa sana, rahisi, na uwezo wa kuchakata maono yenye vipengele vingi. Muundo huu unaauni mafunzo ya YOLO kwa utendaji wa kufuatilia gari kwa uhakika na kubofya.
Mfumo wa Kituo cha chini cha Prometheus
Kituo cha chini cha Prometheus ni kiolesura cha mashine ya binadamu kilichotengenezwa kwa kutumia Qt, kwa kuzingatia mfumo wa Prometheus. Inatumia mawasiliano ya TCP/UDP kurahisisha usanidi wa mawasiliano ya mashine nyingi. Kituo cha chini cha ardhi huwawezesha watumiaji kuiga haraka kazi mbalimbali za mfumo wa Prometheus, kutoa ufuatiliaji wa wakati halisi wa hali ya UAV, pamoja na vipengele kama vile kuondoka kwa mbofyo mmoja, kutua, na uendeshaji wa amri ya udhibiti wa nafasi.
Maombi
-
Utafiti wa kisayansi na Maendeleo ya AI
- Mtihani wa algorithm ya AI
- Uchambuzi wa data wa kihisi wa hali ya juu
- Usindikaji wa picha na ufuatiliaji wa wakati halisi
-
Maombi ya Viwanda
- Usahihi wa ramani na urambazaji katika mazingira changamano
- Ugunduzi wa vikwazo na uepukaji katika vifaa na ghala
- Ukaguzi wa miundombinu kama vile njia za umeme na mabomba
-
Matumizi ya Kielimu na Kielimu
- Upangaji wa sekondari wa utafiti wa AI unaotegemea ROS
- Maonyesho ya maabara na majaribio
- Mafunzo katika urambazaji unaojiendesha wa ndege zisizo na rubani
-
Ufumbuzi wa Smart City
- Ujenzi mpya wa anga wa 3D kwa upangaji miji
- Ufuatiliaji na usimamizi wa trafiki
- Ufuatiliaji na uchambuzi wa mazingira
-
Maendeleo ya Kimila
- Prototyping kwa ajili ya maombi maalumu ya viwanda
- Upimaji na ujumuishaji wa vifaa vipya na vipengee vya programu
-
Mwitikio wa Maafa na Ufuatiliaji wa Mazingira
- Ukaguzi na ufuatiliaji wa anga katika maeneo yaliyokumbwa na maafa
- Ukusanyaji wa takwimu za mazingira kwa ajili ya utafiti na utungaji sera
P600 hutoa unyumbufu usio na kifani na utendakazi, kuwezesha watafiti, wahandisi, na watengenezaji kutekeleza miradi ngumu katika hali tofauti.
Related Collections







