








CQ230 Montaj Drone Geliştirme Kiti - Raspberry Pi 4B Pixhawk Ardupilot Çarpışma Önleyici Raflı Endüstriyel Açık Kaynak Programlanabilir DIY Drone Kiti
CQ230 Montaj Drone Geliştirme Kiti - Raspberry Pi 4B Pixhawk Ardupilot Çarpışma Önleyici Raflı Endüstriyel Açık Kaynak Programlanabilir DIY Drone Kiti
RCDrone
Teslim alım stok durumu yüklenemedi
Genel bakış
CQ230 Montaj Drone Geliştirme Kiti, kompakt ve açık kaynaklı bir üründür. Kendin yap drone platform tarafından desteklenmektedir Ahududu Pi 4B Ve Pixhawk uçuş kontrolörü. 230 mm dingil mesafesi, çarpışma önleyici çerçeve ve 4S (16,8 V) güç sistemine sahip olan bu drone, açık kaynaklı programlanabilir özellikleri öğrenmek ve denemek için idealdir. Platform, yol noktası navigasyonu, veri izleme ve gerçek zamanlı video akışı gibi görevler için tam donanımlıdır ve bu da onu geliştiriciler ve yeni başlayanlar için mükemmel bir seçim haline getirir.
Temel Özellikler
- Kompakt Tasarım: 360mm x 360mm x 300mm boyutlarındaki drone, dar alanlar için idealdir.
- Çarpışma Önleyici Raf: Tamamen karbon fiber çarpışma önleyici çerçeve dayanıklılık ve koruma sağlar.
- Raspberry Pi 4B Entegrasyonu: Sorunsuz çalışma ve geliştirme için Ubuntu 20.04 ile geliştirildi.
- Açık Kaynaklı Çerçeve: Tarafından desteklenmektedir Ardu pilotuDronekit, MAVLink ve ROS'u destekliyor.
- Programlanabilir Görevler:Otonom navigasyon, gerçek zamanlı veri izleme ve görsel işleme yeteneğine sahiptir.
- Yol Noktası Navigasyonu: GPS tabanlı doğrulukla rotalar belirleyin.
- Gerçek Zamanlı Veri İletimi: Yer istasyonlarına WiFi destekli veri aktarımı.
- Görsel Navigasyon: Kapalı alanda hassas navigasyon ve engel önleme için çift kameralı sistemler.
- Programlanabilir Kontroller:Özel uçuş komutları oluşturmak için Dronekit-Python'u kullanın.
- Sistem Simülasyonu: İşlevselliğin kusursuz bir şekilde test edilmesi için SITL simülasyonunu birleştirin.
Özellikler
| Parametre | Detaylar |
|---|---|
| Örnek | ÇQ230 |
| Dingil açıklığı | 230mm |
| Pil | 4S (16,8V) |
| Uçuş Süresi | 7 dakika |
| Yük Kapasitesi | 200 gr |
| Rüzgar Direnci | Seviye 3-4 |
| Maksimum Hız | 20 km/saat |
| Maksimum Uçuş İrtifa | 120m |
| Konumlandırma Doğruluğu | 2-3m (GPS) |
| Ağırlık | 612 gr |
| Uzaktan Kumanda Aralığı | 700m |
Paket
Temel Sürüm
- Pixhawk 2.4.8 Uçuş Kontrol Cihazı ×1
- M8N GPS ×1
- Ledi MINI PIX Güç Modülü ×1
- CUAV WiFi Telemetri ×1
- 30A ESC×4
- 5045 Pervane ×4
- CQ230 Çerçeve ×1
- A400 Denge Şarj Cihazı ×1
- 4S 2300mAh Pil ×1
- 2205 Motorlu ×4
- FS-i6 Uzaktan Kumanda ×1
- BB Alarm Buzzer ×1
- MF-01 Optik Akış Modülü ×1
Görsel Versiyon
- Pixhawk 2.4.8 Uçuş Şirketidenetçi ×1
- M8N GPS ×1
- Ledi MINI PIX Güç Modülü ×1
- CS Kamera ×1
- 30A ESC×4
- 5045 Pervane ×4
- CQ230 Çerçeve ×1
- BB Alarm Buzzer ×1
- MF-01 Optik Akış Modülü ×1
- A400 Denge Şarj Cihazı ×1
- 4S 2300mAh Pil ×1
- 2205 Motorlu ×4
- FS-i6 Uzaktan Kumanda ×1
- Raspi 4B-4G Yerleşik Bilgisayar ×1 Set
- T265 Görsel Kamera ×1
Uygulamalar
- Teslimat:Hafif eşyalarınızı verimli bir şekilde taşıyın.
- Eğitimsel Gelişim:Öğrenciler ve araştırmacıların drone sistemlerini keşfetmeleri için idealdir.
- Görsel İşleme: Gelişmiş video akışı ve analizi için OpenCV kullanın.
- Navigasyon Deneyleri: Otonom GPS tabanlı uçuş ve pozisyon takibini deneyin.
Ek Notlar
- Sistemde gelişmiş programlama arayüzü için Ubuntu 20.04 bulunmaktadır.
- Ardupilot'un güçlü ekosistemi, drone uygulamalarında ölçeklenebilirlik ve çok yönlülük sağlıyor.
- Yeni başlayanlar ve profesyoneller için hazırlanmış, eğitim içerikli, eksiksiz bir öğrenme seti.
Detaylar
CQ230 Açık Kaynaklı İHA Sistemi

Pixhawk: Drone Donanım Sistemi
Yeni standart 32-bit işlemci STM32F427 ile donatılmış ve 5611 barometre ile eşleştirilmiş Pixhawk 2.4.8 denetleyicisini kullanır. Zengin arayüz seçeneklerine sahip uygun maliyetli bir açık kaynaklı denetleyicidir.

ArduPilot: Drone Yazılım Sistemi
İnsansız hava aracının yazılım sistemi (esas olarak kontrol yazılımı), yaygın olarak benimsenen açık kaynaklı ArduPilot projesini kullanıyor.
(ArduPilot gelişmiş, tüm özelliklere sahip ve güvenilir bir açık kaynaklı otopilot yazılım sistemi sağlar.)
Hayal edilebilecek tüm drone sistemlerini kontrol edebilir. Teknolojiyi, drone'ları ve keşfetmeyi sevenler için ArduPilot'u anlamak sizi büyüleyici ve ilgi çekici bir dünyayla tanıştıracaktır.

ArduPilot dünya çapında 1.000.000'den fazla drone sistemine kurulmuştur. Gelişmiş veri kaydı, analiz ve simülasyon araçlarıyla donatılmış, kapsamlı bir şekilde test edilmiş ve güvenilir bir otopilot sistemidir. Ayrıca NASA, Intel, Insitu, Boeing gibi büyük kuruluşlar ve şirketler ve dünyanın dört bir yanındaki çok sayıda enstitü ve üniversite tarafından test ve geliştirme amacıyla kullanılmaktadır.

Görev Planlayıcısı Yer Kontrol İstasyonu
Özellikler:
- Drone ayarlama ve parametre ayarlama araçları;
- Haritalarda uçuş yollarını belirleyerek, droneların önceden belirlenmiş rotaları otomatik olarak takip etmesini sağlayın;
- Drone'u kontrol etmek için açılır menülerden görev komutlarını seçin;
- Günlükleri indirin ve analiz edin;
- SITL (Döngüdeki Yazılım) sistemini kullanarak simülasyonları gerçekleştirin;
- Daha fazla özellik keşfetmenizi bekliyor, üstelik olanaklar bununla da sınırlı değil...


| Önceden Tanımlanmış Özellikler | Temel Sürüm | Görsel Versiyon |
|---|
| Çizgi Çizimi | ✓ | ✓ |
| Yükseklik Tutma, Havada Kalma, Sabitleme | ✓ | ✓ |
| Eve Dönüş, Güvenli Dönüş | ✓ | ✓ |
| İniş, Düşük Pil İnişi | ✓ | ✓ |
| Açık Hava GPS Konumlandırma ve Rota Uçuşu | ✓ | ✓ |
| Dronekit-Python Programlanabilir Kontrol | ✓ | ✓ |
| Gerçek Zamanlı Veri İletimi için WiFi Telemetri (Yaklaşık 5m Menzil) | ✗ | ✓ |
| Kapalı Alan Optik Akış Konumlandırma, Lazer Yükseklik Sabitleme | ✓ | ✓ |
| Kapalı Alan Çift Görsel Konumlandırma Navigasyonu, MP Bağlantı Noktaları, Rota Uçuşu, QR Kod Tanıma ile Hassas İniş | ✗ | ✓ |
Kapalı Alan Uçuşları İçin Uygundur
360mm × 360mm × 300mm boyutlarındaki kompakt tasarım, dar alanlardaki operasyonlar için idealdir.

Karbon fiber çerçeve, güçlü ve düşmeye karşı dayanıklı

Çarpışma önleyici halka tasarımı, uçuş güvenliğini sağlamak için motoru ve pervane kanatlarını etkili bir şekilde korur;

Çoklu Senaryo Fonksiyonel Geliştirme için Gelişmiş Genişletilebilirlik
Temel modele dayanarak, sistem Raspberry Pi 4B'yi ekler ve Raspberry Pi sistemini entegre eder. Bu sistem şunları içerir:
- Ubuntu 20.04 (grafik arayüzlü açık kaynaklı işletim sistemi)
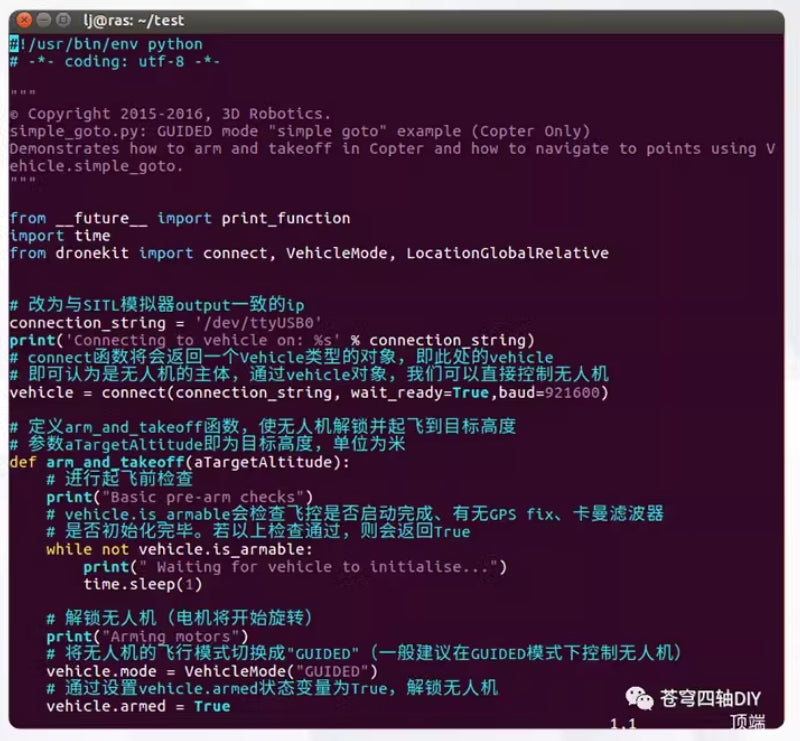
- Dronekit-Python (Dronekit kullanarak drone kontrolü programlamak için bir Python kütüphanesi)
- Pymav bağlantısı (MAVLink protokolünün Python uygulaması, Pymavlink kullanılarak programlanabilir drone kontrolüne olanak tanır)
- ROS (Robot İşletim Sistemi)
- Mavros (ROS aracılığıyla insansız hava araçlarını kontrol etmek için bir iletişim protokolü)
- Gstreamer (düşük gecikmeli video akışı iletimi)
- Mavlink-yönlendirici (Uçuş kontrolörü MAVLink verilerini farklı uç noktalara dağıtır)
- Açık CV (bilgisayarlı görüş işleme için açık kaynaklı yazılım kütüphanesi)

Yukarıdaki sisteme dayanarak drone şunları başarabilir:
- Dronekit-Python kullanılarak programlanabilir drone kontrolü
2. AÇIK CV Görsel İşleme
Görüntü aktarımı ve son işlemeyi sağlayan bir CSI kamerası eklendi:
- Görsel akışlar Raspberry Pi kullanılarak yakalanabilir ve OpenCV gibi araçlarla işlenebilir.
- Gerçek zamanlı HD video akışları işlenmek üzere bir bilgisayara geri iletilebilir veya incelenmek üzere bir mobil cihaza gönderilebilir.

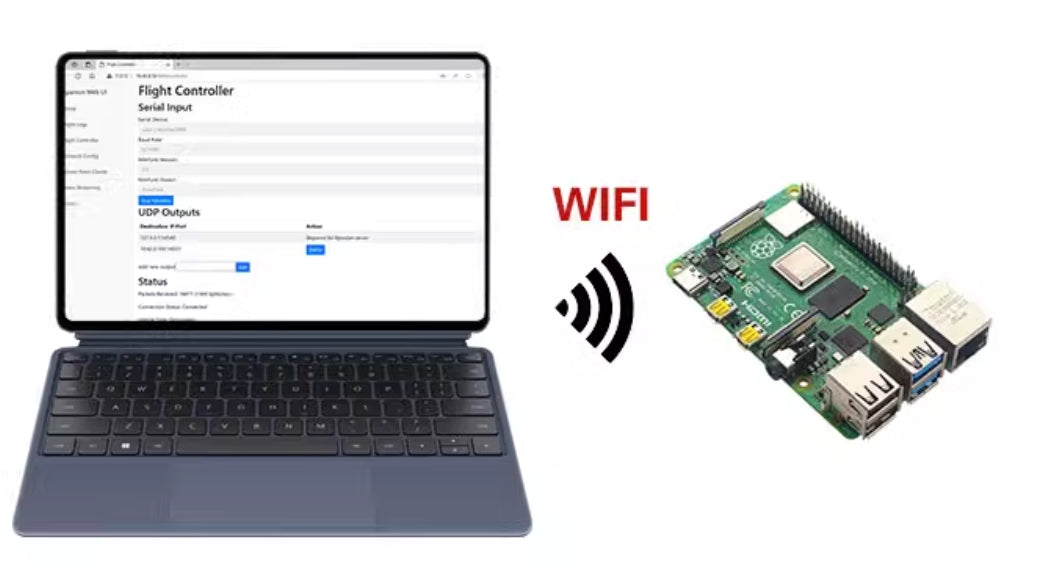
3. Gerçek Zamanlı HD Video İletimi
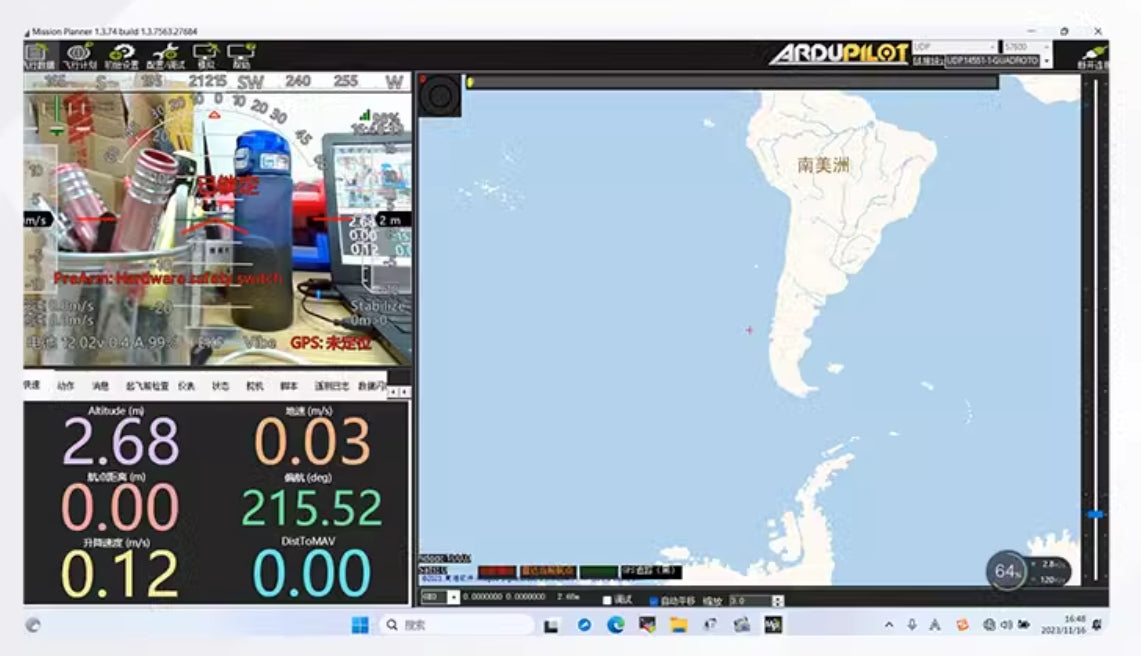
4.Yer İstasyonu Veri İzleme
WiFi ağı ile PC yer istasyonu (MP) arasındaki iletişim ve görüntü iletimi, ek iletim modülleri gerektirmeden gerçekleştirilebilir. PC, 4B'nin WiFi erişim noktasına bağlandıktan sonra, veri ve görüntü iletimi, erişim sağlanarak başlatılabilir. 10.42.0.10:3000 Bir web tarayıcısı aracılığıyla.
5. Yukarıdaki Açık Kaynak Sistemine Dayalı Ek Özellikler ve Algoritma Doğrulaması Geliştirmek
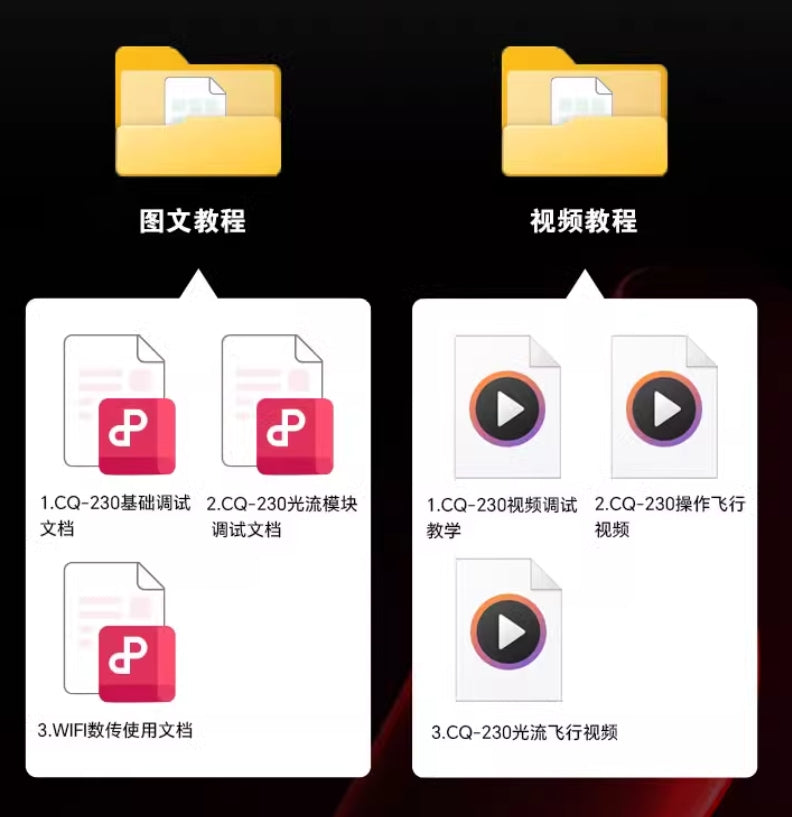
Görsel Versiyon Destekleyici Eğitimler:
Temel versiyon eğitimlerinin yanı sıra Raspberry Pi görsel işlemelerine yönelik giriş seviyesinde eğitimler de verilmektedir.
Related Collections









