


MATEKSYS H7A3-SLIM Uçuş Kontrolcüsü - ICM42688P - 30x30
MATEKSYS H7A3-SLIM Uçuş Kontrolcüsü - ICM42688P - 30x30
MATEKSYS
Teslim alım stok durumu yüklenemedi
MATEKSYS H7A3-SLIM Uçuş Kontrolcüsü kompakt 30x30mm tasarımında yüksek performans sunmaktadır. STM32H7A3RIT6 MCU, 280MHz Cortex-M7 işlemci, 1.4MB RAM ve 2MB Flash ile donatılmıştır. ICM42688P IMU, SPL06-001 barometre, AT7456E OSD ve 128MB Flash Blackbox ile hassas veriler ve yeterli kayıt imkanı sağlar. Kontrolcü, 6 UART, 11 PWM çıkışı, 1 I2C, 1 CAN portu ve 4 ADC kanalı içermektedir. Ayrıca üç durum LED'i, bir USB Type-C portu ve anahtarlamalı 9V çıkışı bulunmaktadır. 30.5 x 30.5mm montaj deseni, 4mm delikler, 3mm conta ve sadece 7g ağırlığı ile FPV yarışı ve serbest uçuş için mükemmeldir. Özel entegrasyon için bir 3D adım dosyası dahildir.
Özellikler
- Ekran Üstü Gösterim
- 30x30 Montaj
- Kompakt Tasarım
- Bağlantı
- Hafif
Teknik Özellikler
Teknik Özellikler
- MCU: STM32H7A3RIT6, 280MHz Cortex-M7, 1.4MB RAM, 2MB Flash
- IMU: ICM42688P
- Baro: SPL06-001
- OSD: AT7456E
- Kara Kutu: 128MB Flash (1G-bit NAND)
- 6x Uart (1,2,3,4, 5, 6) yerleşik ters çevirmeli.
- 11x PWM çıkışı
- 1x I2C
- 1x CAN
- 4x ADC (VBAT, Akım, VB2, Cur2)
- FC DURUMU için 3x LED (Mavi, Kırmızı) ve 3.3V göstergesi (Kırmızı)
- USB Type-C(USB2.0)
- 2x 4in1 ESC için 2x JST-SH1.0_8pin konektör üzerinde 8x PWM çıkışı
- 1x JST-GH1.25_4pin konektör (5V/CAN-H/CAN-L/G)
- 9V çıkış ON/OFF anahtarı ile değiştirilebilir
- Dijital video OSD, herhangi bir yedek UART tarafından desteklenmektedir
Güç
- Vbat Girişi: 6~36V (2~8S LiPo)
- BEC: 5V 2A sürekli. (Maks.3A)
- BEC: 9V 2A sürekli. (Maks.3A)
- LDO 3.3V: Maks.200mA
- Dahili Akım Sensörü yok
- ADC VB2 pad, Maks. 69V destekler (gerilim bölücü: 1K:20K)
FC Yazılımı
- ArduPilot: MATEKH7A3 (4.6 veya daha yenisi)
- ArduPlane https://firmware.ardupilot.org/Plane/beta/MatekH7A3/
- ArduCopter &https://firmware.ardupilot.org/Copter/beta/MatekH7A3/
- STM32CubeProgrammer ile flaşlama
Fiziksel
- Montaj: 30.5 x 30.5mm, Φ4mm Grommet ile Φ3mm
- Boyutlar: 36 x 36 x 5 mm
- Ağırlık: 7g
- 3D adım H7A3-SLIM_step.zip
Dahil
- 1x H7A3-SLIM
- 6x Silikon grommet M4'ten M3'e
- 2x JST-SH1.0_8pin kablo, 5cm, & 8pin konnektörler
- 1x JST-GH-4P'den JST-GH-4P kablo, CAN portu için, 20cm
Ayrıntılar

MATEKSYS H7A3-SLIM uçuş kontrolcüsü, 30.5mm montaj deseninde ICM42688P IMU ve USB-C portu ile STM32H7A3 MCU kullanmaktadır.

MATEKSYS H7A3-SLIM uçuş kontrolcüsü, USB-C portu ve düzenli kablolama için net bir şekilde etiketlenmiş padler ile kompakt 30x30 düzen kullanmaktadır.

MATEKSYS H7A3-SLIM, düzenli kablolama ve kolay kurulum için çift JST-SH 1.0 8-pin konnektörler ile bir JST-GH 4-pin port ve USB Type-C kullanmaktadır.

MATEKSYS H7A3-SLIM, kamera/VTx video, UART'lar, CAN ve güç bağlantıları için net bir şekilde etiketlenmiş lehim padleri ve portları kullanmaktadır.
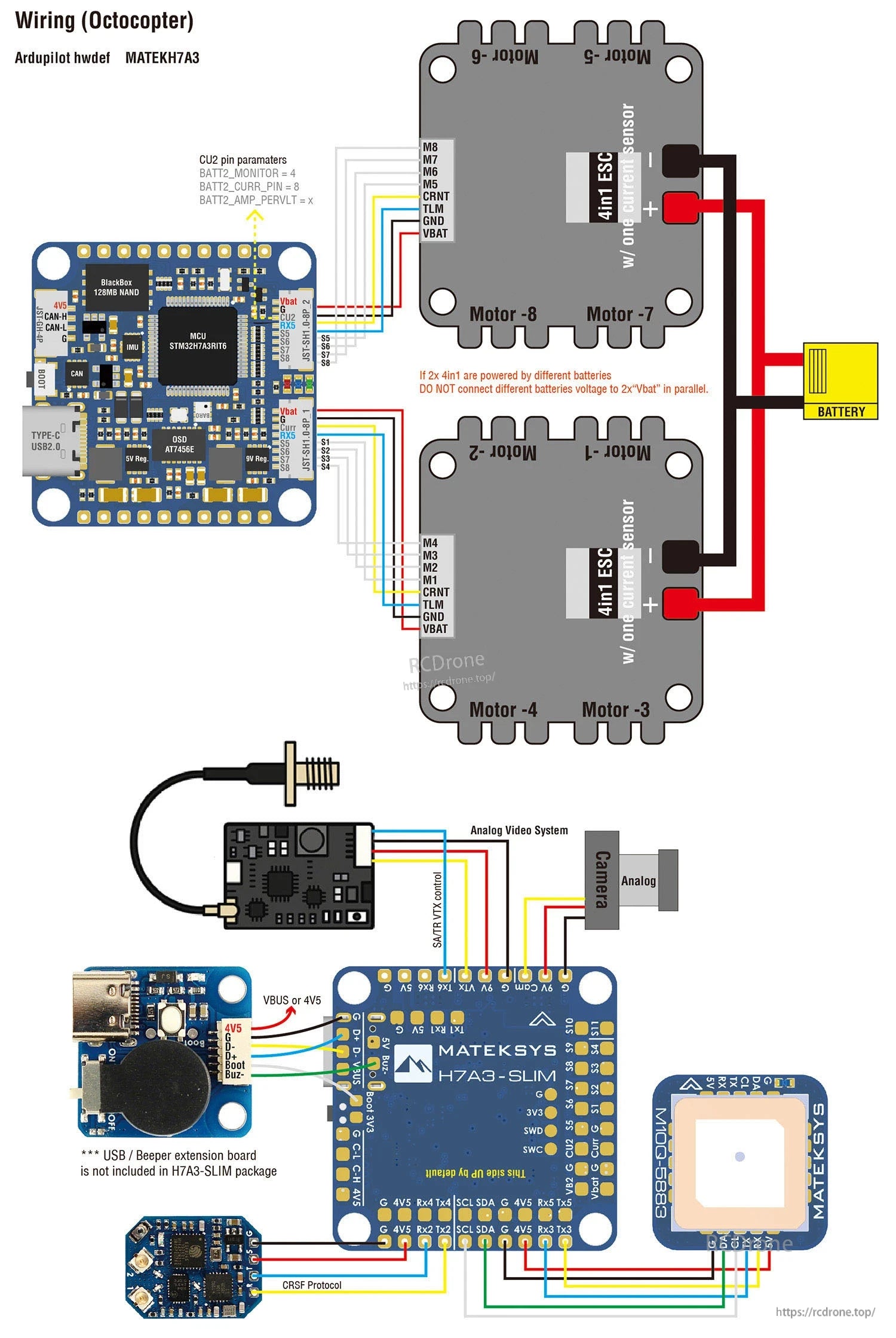
MATEKSYS H7A3-SLIM, çift 4'ü 1 arada ESC'leri, VBAT gücü, GPS, alıcı ve analog video bileşenlerini bağlamak için açıkça etiketlenmiş pedler kullanır.

ArduPilot haritalama
| ArduPilot | ||||||
| PWM | S1 | PWM1 GPIO50 | 5 V toleranslı I/O | TIM1_CH2 | DMA/Bi-DShot | Grup1 |
| S2 | PWM2 GPIO51 | 5 V toleranslı I/O | TIM1_CH3 | DMA/Bi-DShot | ||
| S3 | PWM3 GPIO52 | 5 V toleranslı I/O | TIM2_CH1 | DMA/Bi-DShot | Grup2 | |
| S4 | PWM4 GPIO53 | 5 V toleranslı I/O | TIM2_CH2 | DMA/Bi-DShot | ||
| S5 | PWM5 GPIO54 | 5 V toleranslı I/O | TIM3_CH3 | DMA/Bi-DShot | Gourp3 | |
| S6 | PWM6 GPIO55 | 5 V tolerant I/O | TIM3_CH4 | DMA/Bi-DShot | ||
| S7 | PWM7 GPIO56 | 5 V tolerant I/O | TIM3_CH1 | DMA/Bi-DShot | ||
| S8 | PWM8 GPIO57 | 5 V tolerant I/O | TIM3_CH2 | DMA/Bi-DShot | ||
| S9 | PWM9 GPIO58 | 5 V tolerant I/O | TIM4_CH1 | DMA/DShot | Group4 | |
| S10 | PWM10 GPIO59 | 5 V tolerant I/O | TIM4_CH2 | DMA/DShot | ||
| S11 | PWM11 GPIO60 | 5 V toleranslı G/Ç | TIM16_CH1 | DMA/DShot | Grup5 | |
| PWM1~PWM11 Dshot ve PWM yeteneklidir.Ancak, Dshot ve normal PWM çıkışlarının karıştırılması gruplarla sınırlıdır, yani bir gruptaki bir çıkış için Dshot'un etkinleştirilmesi, o gruptaki TÜM çıkışların Dshot olarak yapılandırılması ve kullanılması gerektiği anlamına gelir, PWM çıkışları yerine. Eğer servo ve motor aynı grupta karıştırılmışsa, bu grubun servo spesifikasyonuna göre en düşük PWM frekansında çalıştığından emin olun. Yani, eğer Servo maksimum 50Hz destekliyorsa, ESC bu grupta 50Hz'de çalışmalıdır. |
||||||
| PINIO | 9V anahtarı | GPIO81 | RELAY1_PIN | 81 | ||
| ADC | Vbat pad | BATT_VOLTAGE_SENS | 6~36V | BATT_VOLT_PIN BATT_VOLT_MULT |
10 21.0 |
|
| Akım pad | BATT_CURRENT_SENS | 0~3.3V | BATT_CURR_PIN BATT_AMP_PERVLT |
11 X |
||
| VB2 Pad | BATT2_VOLTAGE_SENS | 0~69V | BATT2_VOLT_PIN BATT2_VOLT_MULT |
18 21.0 |
||
| CU2 Pad | BATT2_CURRENT_SENS | 0~3.3V | BATT2_CURR_PIN BATT2_AMP_PERVLT |
8 X |
||
| I2C | SCL/SDA | I2C3 | 5V toleranslı I/O | kart üzerindeki Baro SPL06-001 | Adres | 0x76 |
| Dijital Hız I2C MS4525 DLVR-L10D |
ARSPD_BUS ARSPD_TYPE ARSPD_TYPE |
0 1 9 |
||||
| Manyetometre | COMPASS_AUTODEC | 1 | ||||
| CAN | C-H/C-L | CAN2 | 5V toleranslı I/O | CAN | CAN_D1_PROTOCOL CAN_P1_DRIVER |
1 1 |
| GPS VAR MI PUSULA VAR MI HAVA HIZI SENSÖRÜ VAR MI |
GPS_TİPİ PUSULA_TİPİMASKESİ HIZ_TİPİ |
9 0 8 |
||||
| UART | USB | USB | konsol | SERİYAL0_PROTOKOLÜ | 2 | |
| TX1 RX1 | USART1 w/DMA | 5 V toleranslı G/Ç | Telemetri | SERİYAL1_PROTOKOLÜ | 2 | |
| TX2 RX2 | USART2 w/DMA | 5 V toleranslı G/Ç | RC girişi/Alıcı | SERİYAL2_PROTOKOLÜ | 23 | |
| TX3 RX3 | USART3 w/DMA | 5 V toleranslı G/Ç | GPS | SERIAL3_PROTOCOL | 5 | |
| TX4 RX4 | UART4 DMA olmadan | 5 V toleranslı I/O | Yedek | SERIAL4_PROTOCOL | -1 | |
| TX5 RX5 | UART5 DMA olmadan | 5 V toleranslı I/O | Yedek | SERIAL5_PROTOCOL | -1 | |
| TX6 RX6 | USART6 DMA olmadan | 5 V toleranslı I/O | Yedek | SERIAL6_PROTOCOL | -1 | |
RC GİRİŞİ
RC girişi USART2(SERIAL2) üzerinde yapılandırılmıştır.Tüm seri RC protokollerini destekler. SERIAL2_PROTOCOL varsayılan olarak 23'tür.
- PPM desteklenmiyor.
- CRSF, Tx2 & Rx2 bağlantısını gerektirir ve SERIAL2_OPTIONS'ı "0" (varsayılan) olarak ayarlayın.
- SBUS/DSM/SRXL, Rx2 pinine bağlanır, ancak SBUS'un SERIAL2_OPTIONS'ın "3" olarak ayarlanmasını gerektirir.
- FPort, Tx2'ye bağlanmayı gerektirir ve SERIAL2_OPTIONS'ı "7" olarak ayarlayın. Telemetri çalışmıyorsa, SERIAL7_OPTIONS = 135 olarak ayarlamayı deneyin.
- SRXL2, Tx2'ye bağlanmayı gerektirir ve otomatik olarak telemetri sağlar. SERIAL2_OPTIONS'ı "4" olarak ayarlayın.
- ArduPilot'ta RC sistem bağlantıları için herhangi bir UART da kullanılabilir ve PPM hariç tüm protokollerle uyumludur. Ayrıntılar için Radyo Kontrol Sistemleri bakın.
ArduPilot Röle(PINIO)
- Varsayılan olarak 9V çıkışı AÇIK
- PC13 PINIO1 ÇIKIŞ GPIO(81) //9V güç switche.g.
- RELAY1_FONKSİYONU 1
- RELAY1_PIN 81 // PINIO1 GPIO
- RC7_SEÇENEK 28 //Röle Aç/Kapa, 9V AÇIK/KAPALI ayarlamak için Verici'nin CH7'sini kullanın
Yapılandırılan özellik, yardımcı anahtarın pwm değeri 1800'ün üzerine çıktığında tetiklenecektir. Değer 1200'ün altına düştüğünde devre dışı bırakılacaktır.
Anahtar yüksek ve düşük olduğunda vericiden gönderilen pwm değerini Kontrol edin, Mission Planner'ın İlk Kurulum >> Zorunlu Donanım >> Radyo Kalibrasyon ekranını kullanarak.Eğer 1800'den daha yüksek veya 1200'den daha düşük bir değere çıkmıyorsa, vericinin servo uç noktalarını ayarlamak en iyisidir.
Related Collections


