








CQ230 Assembly Development Kit - Raspberry Pi 4B Pixhawk Ardupilot Industrial Open Source Programmable DIY Kit Kit With Anti-Collision Development Kit
CQ230 Assembly Development Kit - Raspberry Pi 4B Pixhawk Ardupilot Industrial Open Source Programmable DIY Kit Kit With Anti-Collision Development Kit
RCDrone
Не вдалося завантажити інформацію про можливість самовивозу
Огляд
Набір для розробки дронів CQ230 – це компактний набір із відкритим кодом Дрон своїми руками платформа на базі Raspberry Pi 4B і Pixhawk диспетчер польотів. Завдяки колісній базі 230 мм, рамі, що запобігає зіткненню, і системі живлення 4S (16,8 В), цей дрон ідеально підходить для навчання та експериментів із програмованими функціями з відкритим кодом. Платформа повністю обладнана для таких завдань, як навігація по маршрутних точках, моніторинг даних і потокове відео в реальному часі, що робить її чудовим вибором як для розробників, так і для новачків.
Ключові характеристики
- Компактний дизайн: Завдяки розмірам 360 мм x 360 мм x 300 мм дрон ідеально підходить для невеликих приміщень.
- Стійка проти зіткнень: повністю вуглецеве волокно запобігає зіткненню рама забезпечує довговічність і захист.
- Інтеграція Raspberry Pi 4B: покращено з Ubuntu 20.04 для плавної роботи та розробки.
- Фреймворк з відкритим вихідним кодом: Powered by Ardupilot, підтримуючи Dronekit, MAVLink і ROS.
- Програмований завдання: можливість автономної навігації, моніторингу даних у реальному часі та візуальної обробки.
- Навігація по точках: встановлення маршрутів із точністю на основі GPS.
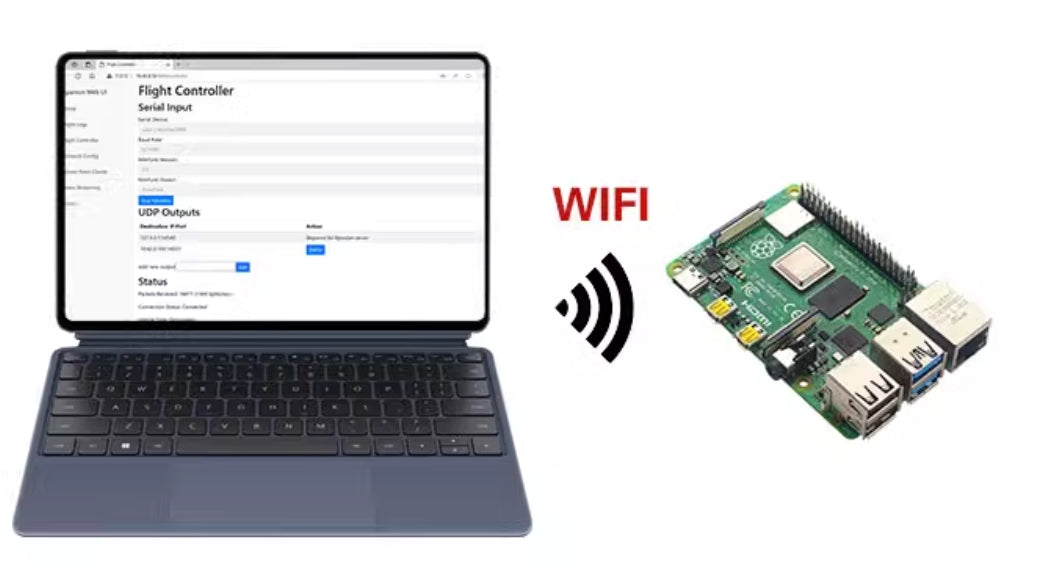
- Передача даних у реальному часі: передача даних із підтримкою WiFi на наземні станції.
- Візуальна навігація: Системи подвійної камери для точної навігації в приміщенні та уникнення перешкод.
- Програмовані елементи керування: Використовуйте Dronekit-Python для створення спеціальних команд польоту.
- Системне моделювання: об’єднайте симуляцію SITL для безперешкодного тестування функціональності.
Технічні характеристики
| Параметр | Подробиці |
|---|---|
| Модель | CQ230 |
| колісна база | 230 мм |
| Акумулятор | 4S (16,8 В) |
| Час польоту | 7 хвилин |
| Ємність корисного навантаження | 200г |
| Опір вітру | Рівень 3-4 |
| Максимальна швидкість | 20 км/год |
| Максимальна висота польоту | 120м |
| Точність позиціонування | 2-3 м (GPS) |
| вага | 612г |
| Діапазон дистанційного керування | 700м |
Пакет
Базова версія
- Контролер польоту Pixhawk 2.4.8 ×1
- M8N GPS ×1
- Модуль живлення Ledi MINI PIX ×1
- Телеметрія CUAV WiFi ×1
- 30A ESC ×4
- 5045 Пропелер ×4
- Рама CQ230 ×1
- Зарядний пристрій A400 Balance ×1
- Акумулятор 4S 2300mAh × 1
- 2205 Двигун ×4
- Пульт дистанційного керування FS-i6 ×1
- Зумер сигналізації BB ×1
- Модуль оптичного потоку MF-01 ×1
Візуальна версія
- Pixhawk 2.4.8 Flight Controller ×1
- M8N GPS ×1
- Модуль живлення Ledi MINI PIX ×1
- Камера CS ×1
- 30A ESC ×4
- 5045 Пропелер ×4
- Рама CQ230 ×1
- Зумер сигналізації BB ×1
- Модуль оптичного потоку MF-01 ×1
- Зарядний пристрій A400 Balance ×1
- Акумулятор 4S 2300mAh × 1
- 2205 Двигун ×4
- Пульт дистанційного керування FS-i6 ×1
- Бортовий комп'ютер Raspi 4B-4G × 1 комплект
- Візуальна камера T265 × 1
Додатки
- Доставка: Ефективно транспортуйте легкі речі.
- Розвиток освіти: ідеально підходить для студентів і дослідників, які досліджують системи безпілотників.
- Візуальна обробка: використовуйте OpenCV для розширеного потокового відео та аналізу.
- Навігаційні експерименти: Експериментуйте з автономним відстеженням польоту та розташування на основі GPS.
Додаткові примітки
- Система включає Ubuntu 20.04 для вдосконаленого інтерфейсу програмування.
- Надійна екосистема Ardupilot забезпечує масштабованість і універсальність застосування дронів.
- Повний навчальний комплект із навчальними посібниками для початківців і професіоналів.
Подробиці
Безпілотна система з відкритим кодом CQ230

Pixhawk: Апаратна система дронів
Використовує контролер Pixhawk 2.4.8, оснащений новим стандартним 32-розрядним процесором STM32F427 і в парі з барометром 5611. Це економічно ефективний контролер із відкритим вихідним кодом із багатими можливостями інтерфейсу.

ArduPilot: Програмна система для дронів
Програмна система дрона — по суті мікропрограма керування — використовує широко поширений проект із відкритим кодом ArduPilot.
(ArduPilot надає розширену, повнофункціональну та надійну програмну систему автопілота з відкритим кодом.)
Він може керувати всіма уявними системами дронів. Для тих, хто любить технології, дрони та дослідження, розуміння ArduPilot познайомить вас із захоплюючим і привабливим світом.

ArduPilot було встановлено в понад 1 000 000 системах дронів по всьому світу. Оснащена розширеними інструментами реєстрації даних, аналізу та моделювання, це ретельно перевірена та надійна система автопілота. Він також використовується великими організаціями та компаніями, такими як NASA, Intel, Insitu, Boeing, а також численними інститутами та університетами по всьому світу для тестування та розробки.

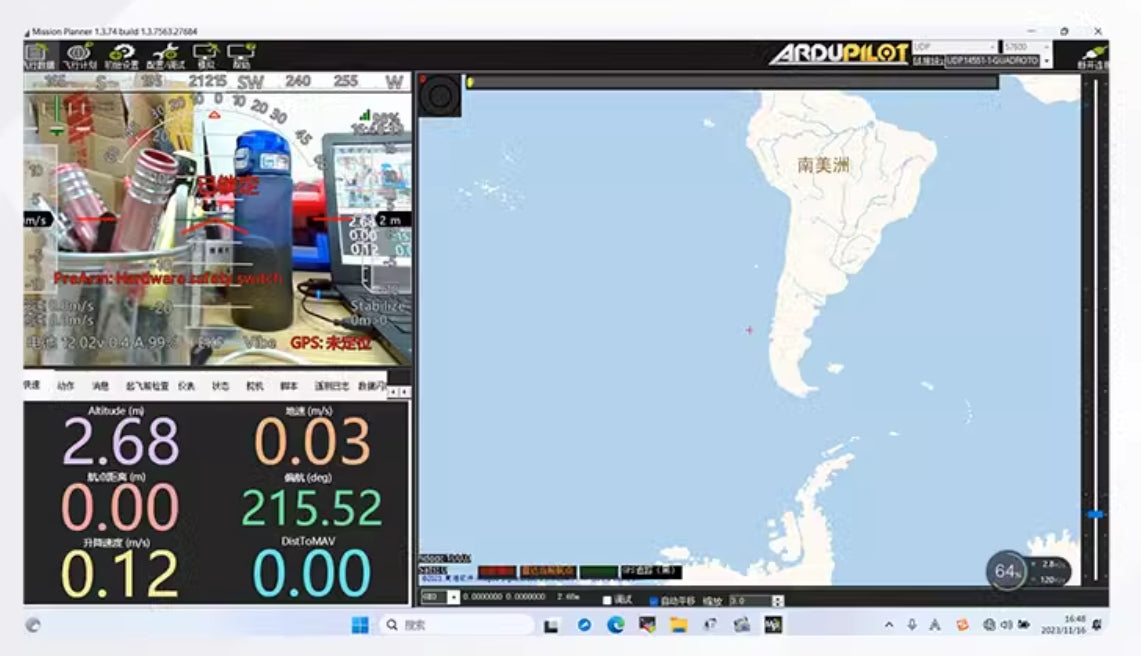
Наземна станція планування місії
особливості:
- Інструменти налаштування та налаштування параметрів дрона;
- Встановлюйте маршрути польоту на картах, дозволяючи дронам автоматично слідувати заданим маршрутам;
- Виберіть команди місії зі спадних меню, щоб керувати дроном;
- Завантажувати та аналізувати журнали;
- Виконуйте моделювання за допомогою системи SITL (Software In The Loop);
- Більше функцій чекають на ваше відкриття, і можливості на цьому не закінчуються...


| Попередньо визначені функції | Базова версія | Візуальна версія |
|---|
| Штриховий малюнок | ✓ | ✓ |
| Утримання висоти, наведення, стабілізація | ✓ | ✓ |
| Повернення додому, безвідмовне повернення | ✓ | ✓ |
| Посадка, посадка з розрядженою батареєю | ✓ | ✓ |
| Відкритий GPS позиціонування та маршрут польоту | ✓ | ✓ |
| Програмоване керування Dronekit-Python | ✓ | ✓ |
| Телеметрія Wi-Fi для передачі даних у реальному часі (діапазон прибл. 5 м) | ✗ | ✓ |
| Позиціонування оптичного потоку в приміщенні, лазерна фіксація висоти | ✓ | ✓ |
| Навігація з подвійним візуальним позиціонуванням у приміщенні, опорні точки MP, маршрут польоту, точна посадка з розпізнаванням QR-коду | ✗ | ✓ |
Підходить для польотів у приміщенні
Компактна конструкція з розмірами 360 мм × 360 мм × 300 мм ідеально підходить для роботи в невеликих приміщеннях.

Карбоновий каркас, міцний і стійкий до падіння

Конструкція кільця проти зіткнення ефективно захищає двигун і лопаті гвинта для забезпечення безпеки польоту;

Розширені можливості розширення для функціональної розробки за кількома сценаріями
Базуючись на базовій моделі, система додає Raspberry Pi 4B і має інтегровану систему Raspberry Pi. Ця система включає:
- Ubuntu 20.04 (операційна система з відкритим кодом і графічним інтерфейсом)
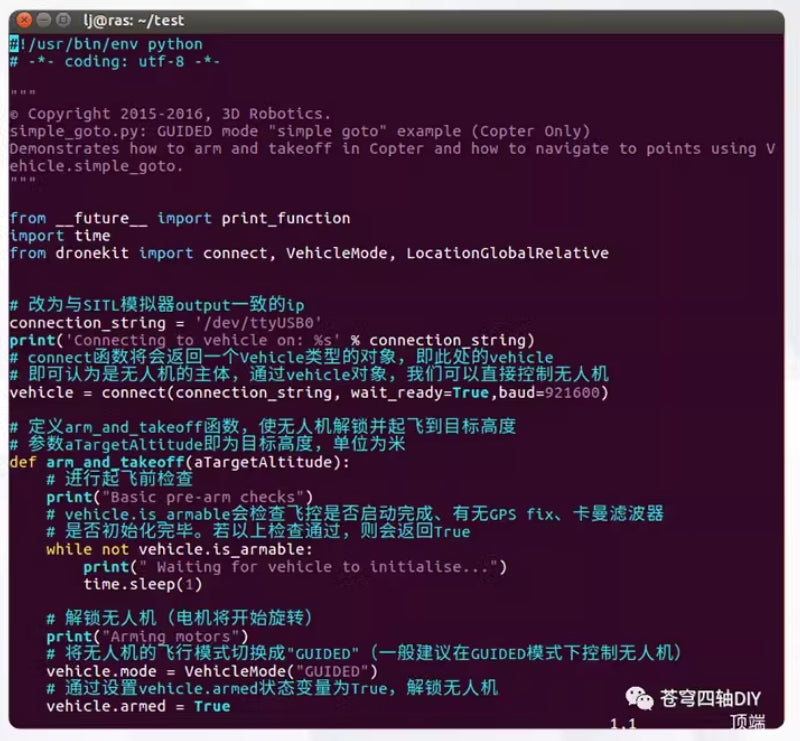
- Dronekit-Python (бібліотека Python для програмування керування дроном за допомогою Dronekit)
- Pymavlink (реалізація Python протоколу MAVLink, яка дозволяє програмоване керування дроном за допомогою Pymavlink)
- ROS (Операційна система робота)
- Маврос (протокол зв'язку для керування дронами через ROS)
- Gstreamer (потокова передача відео з низькою затримкою)
- Mavlink-роутер (розповсюджує дані MAVLink контролера польоту на різні кінцеві точки)
- OpenCV (відкрита бібліотека програмного забезпечення для обробки комп’ютерного зору)

Завдяки наведеній вище системі дрон може досягати:
- Програмоване керування дроном за допомогою Dronekit-Python
2. Візуальна обробка OPEN CV
Додано камеру CSI, яка забезпечує передачу та пост-обробку зображення:
- Візуальні потоки можна захоплювати за допомогою Raspberry Pi та обробляти за допомогою таких інструментів, як OpenCV.
- HD-відеопотоки в реальному часі також можна передавати назад на ПК для обробки або відправляти на мобільний пристрій для перегляду.

3. Передача HD відео в реальному часі
4.Моніторинг даних наземної станції
Зв'язок і передача зображення між мережею WiFi і наземною станцією ПК (MP) може бути досягнута без необхідності додаткових модулів передачі. Після підключення комп’ютера до точки доступу Wi-Fi 4B передачу даних і зображень можна ініціювати за допомогою 10.42.0.10:3000 через веб-браузер.
5. Розробка додаткових функцій і перевірка алгоритму на основі вищезазначеної системи з відкритим вихідним кодом
Підручники з підтримки візуальної версії:
На додаток до навчальних посібників з базової версії також надаються вступні посібники для візуальної обробки Raspberry Pi.
Related Collections









