








CQ230 組裝無人機開發套件 - Raspberry Pi 4B Pixhawk Ardupilot 工業開源可編程 DIY 無人機套件帶防撞架
CQ230 組裝無人機開發套件 - Raspberry Pi 4B Pixhawk Ardupilot 工業開源可編程 DIY 無人機套件帶防撞架
RCDrone
無法載入取貨服務供應情況
概述
CQ230 組裝無人機開發套件是一款緊湊型開源 DIY無人機 平台由 樹莓派4B 和 皮克斯霍克 飛行控制器。這款無人機具有 230mm 軸距、防撞框架和 4S (16.8V) 電源系統,非常適合學習和實驗開源可編程功能。該平台功能齊全,可完成航路點導航、資料監控和即時視訊串流等任務,使其成為開發人員和初學者的絕佳選擇。
主要特點
- 緊湊型設計:無人機尺寸為 360mm x 360mm x 300mm,非常適合狹小空間。
- 防撞架:全碳纖維防撞框架確保耐用性和保護性。
- 樹莓派 4B 集成:使用 Ubuntu 20.04 進行增強,以實現流暢的操作和開發。
- 開源框架: 供電 阿杜飛行員,支援 Dronekit、MAVLink 和 ROS。
- 可程式設計 任務:能夠自主導航、即時數據監控、視覺化處理。
- 航點導航:以基於 GPS 的精確度設定路線。
- 即時資料傳輸:支援 WiFi 的資料傳輸至地面站。
- 視覺導航:雙攝影機系統,可實現精確的室內導航和避障。
- 可程式控制:利用 Dronekit-Python 創建自訂飛行命令。
- 系統仿真:結合 SITL 模擬進行功能的無縫測試。
規格
| 範圍 | 細節 |
|---|---|
| 模型 | CQ230 |
| 軸距 | 230毫米 |
| 電池 | 4S(16.8V) |
| 飛行時間 | 7分鐘 |
| 有效負載能力 | 200克 |
| 抗風能力 | 3-4級 |
| 最大速度 | 20公里/小時 |
| 最大飛行高度 | 120m |
| 定位精度 | 2-3m(GPS) |
| 重量 | 612克 |
| 遙控範圍 | 700m |
包裹
基礎版
- Pixhawk 2.4.8 飛行控制器 ×1
- M8N GPS ×1
- 樂迪MINI PIX電源模組×1
- CUAV WiFi遙測 ×1
- 30A電調×4
- 5045螺旋槳×4
- CQ230框架×1
- A400平衡充×1
- 4S 2300mAh電池×1
- 2205馬達×4
- FS-i6遙控器×1
- BB警報蜂鳴器×1
- MF-01光流模組×1
視覺版
- 像素鷹 2.4。8 飛行公司控制器 ×1
- M8N GPS ×1
- 樂迪MINI PIX電源模組×1
- 連拍相機 ×1
- 30A電調×4
- 5045螺旋槳×4
- CQ230框架×1
- BB警報蜂鳴器×1
- MF-01光流模組×1
- A400平衡充×1
- 4S 2300mAh電池×1
- 2205馬達×4
- FS-i6 遙控器 ×1
- Raspi 4B-4G車上電腦×1套
- T265視覺相機×1
應用領域
- 送貨:高效率運輸輕質物品。
- 教育發展:非常適合學生和研究人員探索無人機系統。
- 視覺處理:使用 OpenCV 進行進階視訊串流和分析。
- 導航實驗:嘗試基於 GPS 的自主飛行和位置追蹤。
附加說明
- 該系統包括用於增強編程介面的 Ubuntu 20.04。
- Ardupilot 強大的生態系統可確保無人機應用的可擴展性和多功能性。
- 為初學者和專業人士提供包含教程的完整學習套件。
細節
CQ230開源無人機系統

Pixhawk:無人機硬體系統
採用Pixhawk 2.4.8控制器,配備全新標準32位元處理器STM32F427,搭配5611氣壓計。它是一款高性價比的開源控制器,具有豐富的介面選項。

ArduPilot:無人機軟體系統
無人機的軟體系統(本質上是控制韌體)使用廣泛採用的開源專案 ArduPilot。
(ArduPilot提供先進、功能齊全、可靠的開源自動駕駛軟體系統。)
它可以控制所有可以想像的無人機系統。對於那些熱愛技術、無人機和探索的人來說,了解 ArduPilot 將帶您進入一個迷人且引人入勝的世界。

ArduPilot 已安裝在全球超過 1,000,000 個無人機系統中。它配備了先進的數據記錄、分析和模擬工具,是經過全面測試且可靠的自動駕駛系統。它也被 NASA、英特爾、Insitu、波音等主要組織和公司以及世界各地的眾多研究所和大學用於測試和開發。

工作規劃器地面控制站
特徵:
- 無人機調諧和參數設定工具;
- 在地圖上設定飛行路徑,讓無人機自動依照預設航線飛行;
- 從下拉式選單中選擇任務命令來控制無人機;
- 下載並分析日誌;
- 使用SITL(軟體在環)系統進行模擬;
- 更多功能等待您的發現,而可能性不止於此...


| 預定義功能 | 基礎版 | 視覺版 |
|---|
| 線條圖 | ✓ | ✓ |
| 高度保持、懸停、穩定 | ✓ | ✓ |
| 返回家園,安全返回 | ✓ | ✓ |
| 著陸、低電量著陸 | ✓ | ✓ |
| 戶外GPS定位及航線飛行 | ✓ | ✓ |
| Dronekit-Python 可程式控制 | ✓ | ✓ |
| 用於即時資料傳輸的 WiFi 遙測(約 5m 範圍) | ✗ | ✓ |
| 室內光流定位、雷射定高 | ✓ | ✓ |
| 室內雙視覺定位導航、MP錨點、航線飛行、二維碼精準降落 | ✗ | ✓ |
適合室內飛行
設計緊湊,尺寸為360mm×360mm×300mm,非常適合小空間操作。

碳纖維框架,堅固耐摔

防撞環設計,有效保護馬達和螺旋槳葉片,確保飛行安全;

增強擴展性,支援多場景功能開發
系統在基本型號的基礎上增加了Raspberry Pi 4B,整合了Raspberry Pi系統。系統包括:
- 烏班圖20.04 (具有圖形介面的開源作業系統)
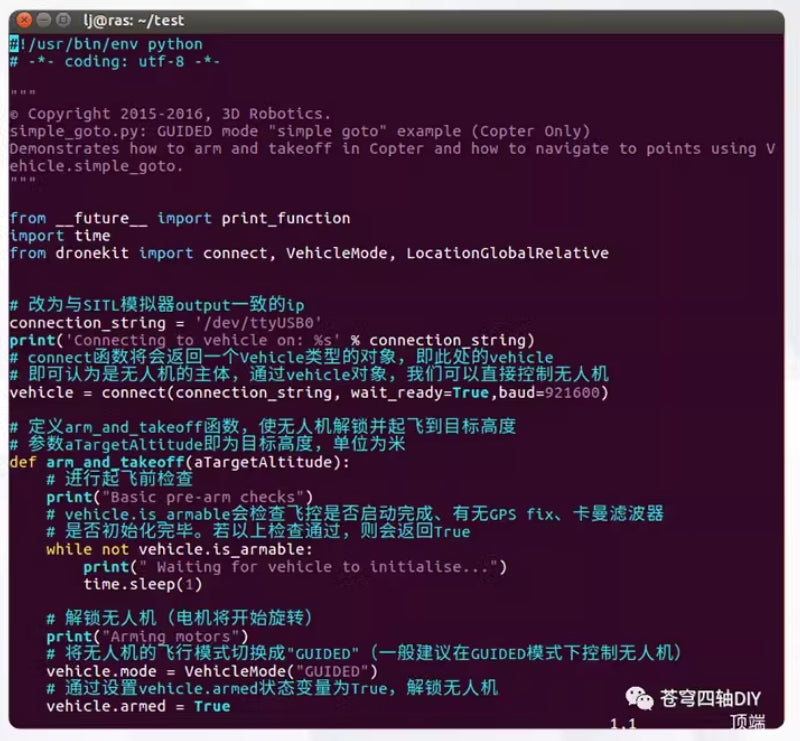
- Dronekit-Python (使用 Dronekit 進行無人機控製程式設計的 Python 函式庫)
- 皮馬夫連結 (MAVLink 協定的 Python 實現,使用 Pymavlink 實現可程式無人機控制)
- 活性氧 (機器人作業系統)
- 馬夫羅斯 (透過ROS控制無人機的通訊協定)
- Gstreamer (低延遲視訊串流)
- Mavlink-路由器 (將飛控MAVLink資料分送到不同端點)
- 開放式電腦視覺 (電腦視覺處理的開源軟體庫)

基於上述系統,無人機可以實現:
- 使用 Dronekit-Python 進行可程式無人機控制
2. OPEN CV視覺處理
新增CSI相機,實現影像傳輸和後處理:
- 可以使用 Raspberry Pi 捕獲視覺流,並使用 OpenCV 等工具進行處理。
- 即時高清視訊串流還可以傳輸回 PC 進行處理或發送到行動裝置進行檢視。

3. 即時高畫質視訊傳輸
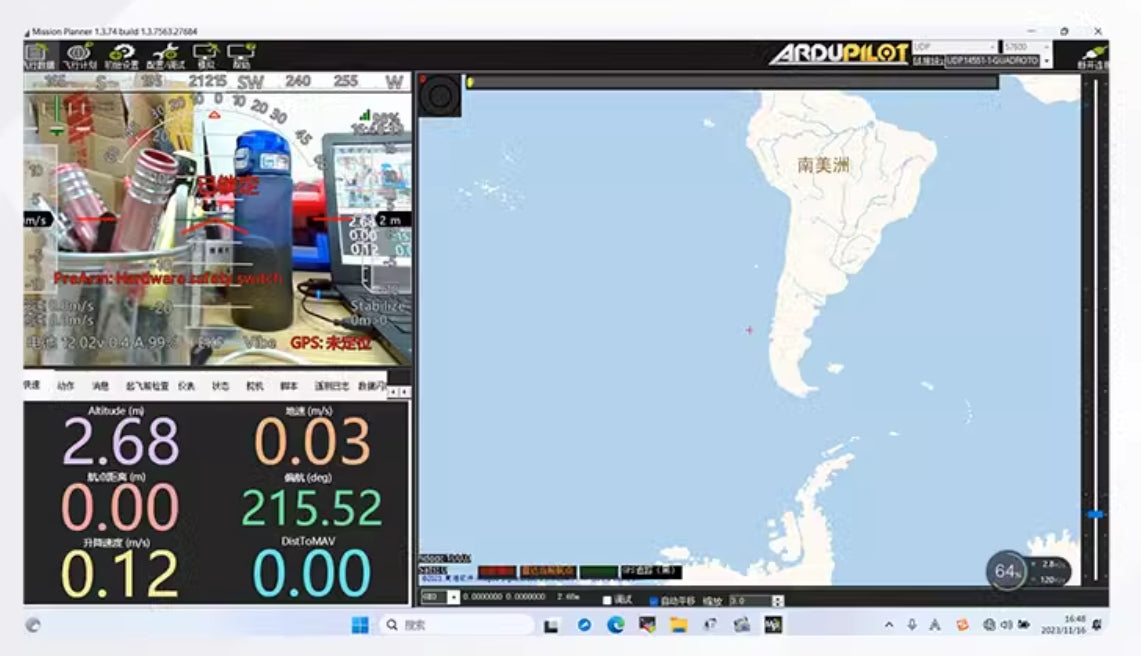
4.地面站數據監控
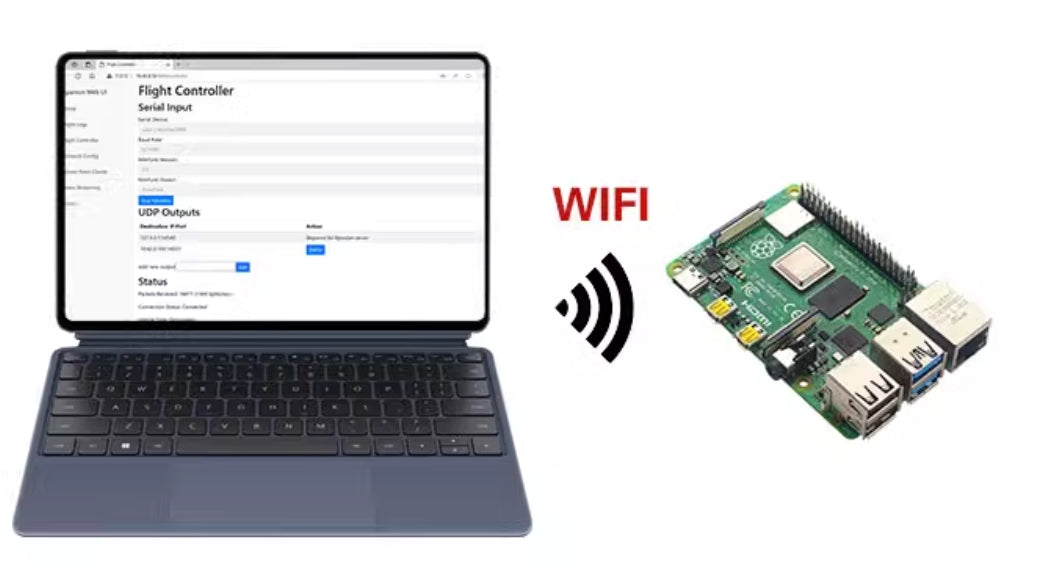
無需額外的傳輸模組即可實現WiFi網路與PC地面站(MP)之間的通訊和影像傳輸。 PC連接4B的WiFi熱點後,可以透過存取發起資料和影像傳輸 10.42.0.10:3000 透過網頁瀏覽器。
5. 基於上述開源系統開發附加功能和演算法驗證
視覺版支援教學:
除了基礎版教學外,還提供了Raspberry Pi視覺處理的入門教學。
Related Collections









