


RadioLink SU04 超聲波感測器,適用於 PIXHAWK/Mini Pix 障礙物避讓與定高
RadioLink SU04 超聲波感測器,適用於 PIXHAWK/Mini Pix 障礙物避讓與定高
RadioLink
無法載入取貨服務供應情況
概述
主要特點
-
超快響應: 透過雙重濾波技術實現30毫秒工作週期
-
精確檢測: 0.4cm 分辨率,60° 發射器波束角度
-
零衰減區域: 確保即使在近距離也能可靠感應
-
靈活安裝: 支持任意兩個方向或一個方向的上下感應
-
廣泛兼容性: 支持 I2C 和 UART (MAVlink) 協議
-
支持多種飛行控制器: PIX, PIXHAWK, Mini Pix, TURBO PiX, CrossFlight, CrossRace, CrossFlight-CE, CrossRace Pro
-
廣泛應用: 非常適合無人機、遙控車輛和船隻的避障和高度保持
規格
| 參數 | 值 |
|---|---|
| 尺寸 | 20×22×19mm (0.79"×0.87"×0.75") |
| 重量(含電線) | 8克(0.28盎司) |
| 輸入電壓 | 4.5–5.5V(不支持高電壓) |
| 電流 | 18mA@5V |
| 功率 | 90mW |
| 工作溫度 | -30°C 到 +85°C |
| 檢測距離 | 40cm–450cm (15.75"–177.17") |
| 檢測精度 | 0.4cm (0.16") |
| 檢測頻率 | 40±1.0KHz |
| 光束角度 | 60° (收發器) |
| 淡出區域 | 0 (由FC讀取為0淡出區域) |
| 輸出 | I2C, UART (MAVlink協議) |
| 工作週期 | 30毫秒 |
| 飛行控制器兼容性 | PIX, PIXHAWK, CrossFlight, CrossFlight-CE, CrossRace Pro, CrossRace, Mini Pix, TURBO PiX, PXHAWK (開源) |
| 型號兼容性 | 直升機、多旋翼、飛機、汽車、船隻 |
| 避障方向 | 最多可同時支持2個方向:前、後、左、右、上或下;或任意1個方向 + 高度保持 |
工作原理
使用超聲波回聲傳輸,SU04 在 30ms 週期 內發射和接收超聲波,準確檢測附近的障礙物。感測器實現即時高度感測和環境反饋,確保安全導航,即使在如山丘或斜坡等複雜地形中也能運行。
應用
-
農業無人機: 具備向下斜坡檢測的地形跟隨噴灑任務
-
FPV和賽車無人機: 輕量化感測器,理想用於狹小空間的障礙物檢測
-
自動駕駛車輛: 在遙控車和船中進行準確的距離測量和即時避障
-
訓練與戶外操作: 透過即時高度反饋和障礙物感測增強安全性
Mini Pix 接線圖
SU04 通過 I2C 或 UART 連接到 Mini Pix 或其他支持的飛控,並配備 I2C 傳輸板,便於集成高度保持和避障功能。
包裝內容
詳細資訊

超聲波傳感器 SU04 適用於直升機、多旋翼飛行器、飛機、汽車和船隻。具備雙重濾波器、30毫秒響應時間、0.4厘米精度、60°光束角以實現準確的障礙物避免。

SU04 超聲波傳感器使用硬體和軟體雙重濾波器,實現 30 毫秒的快速響應,確保準確性。兼容 CrossRace、Pixhawk、Mini Pix、TURBO Pix 和通過 I2C 和 UART 協議的開源 PIXHAWK。

SU04 超聲波傳感器具有 0.4cm 的精度和 60° 的波束角度。

SU04 超聲波傳感器確保實時環境檢測和障礙物感知。與 crossflight、PIXHAWK、Mini Pix 或 TURBO PiX 連接,以 60° 的波束角度實現更安全的飛行。

SU04 超聲波收發器,尺寸 20x22x19mm,重量 8g。SR05 版本確保戶外無人機操作和訓練的安全性。非常適合農業,實現精確的高度控制和障礙物避免。
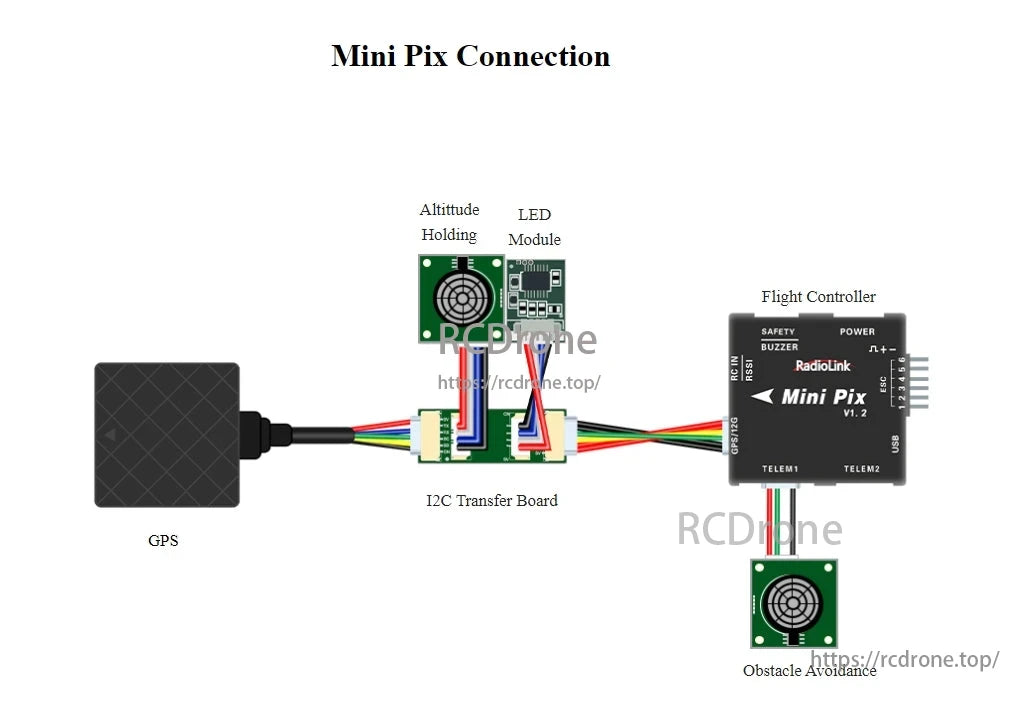
Mini Pix 連接圖包括 GPS、I2C 傳輸板、高度保持 LED 模組、飛行控制器和避障系統。

SU04 包裝清單:SU04*1、Mini Pix 的線(I2C)*1、PIXHAWK 的線(I2C)*1、Mini Pix 的線(TELEM1&2)*1、PIXHAWK 的線(TELEM1&2)*1、包裝袋*1。

RadioLink SU04 超聲波傳感器:20x22x19mm,8g,4.5-5.5V,90mW 功率,-30 至 85°C,40-450cm 範圍,0.4cm 精度,60° 光束角,I2C/UART 輸出,與各種飛行控制器和模型兼容。


