مجموعة تطوير الطائرات بدون طيار CQ230 - Raspberry Pi 4B Pixhawk Ardupilot الصناعية مفتوحة المصدر القابلة للبرمجة DIY بدون طيار مع حامل مضاد للتصادمات
مجموعة تطوير الطائرات بدون طيار CQ230 - Raspberry Pi 4B Pixhawk Ardupilot الصناعية مفتوحة المصدر القابلة للبرمجة DIY بدون طيار مع حامل مضاد للتصادمات
RCDrone
تعذر تحميل توفر الالتقاط
ملخص
مجموعة تطوير الطائرات بدون طيار CQ230 هي مجموعة صغيرة الحجم ومفتوحة المصدر طائرة بدون طيار DIY منصة مدعومة بواسطة راسبيري باي 4B و بيكهوك وحدة تحكم في الطيران. تتميز هذه الطائرة بدون طيار بقاعدة عجلات 230 مم وإطار مضاد للتصادم ونظام طاقة 4S (16.8 فولت)، وهي مثالية للتعلم والتجريب باستخدام ميزات قابلة للبرمجة مفتوحة المصدر. المنصة مجهزة بالكامل لمهام مثل التنقل عبر نقاط المسار ومراقبة البيانات وبث الفيديو في الوقت الفعلي، مما يجعلها خيارًا ممتازًا للمطورين والمبتدئين على حد سواء.
الميزات الرئيسية
- تصميم مضغوط:بحجم 360 مم × 360 مم × 300 مم، تعد الطائرة بدون طيار مثالية للمساحات الصغيرة.
- رف مضاد للتصادم:يضمن الإطار المضاد للتصادم المصنوع بالكامل من ألياف الكربون المتانة والحماية.
- التكامل مع Raspberry Pi 4B:تم تحسينه باستخدام Ubuntu 20.04 لضمان التشغيل السلس والتطوير.
- إطار عمل مفتوح المصدر:مدعوم بواسطة أردو بايلوت، يدعم Dronekit، وMAVLink، وROS.
- قابلة للبرمجة المهام:قادرة على الملاحة المستقلة، ومراقبة البيانات في الوقت الحقيقي، والمعالجة البصرية.
- تحديد نقطة المسار:قم بتعيين المسارات بدقة تعتمد على نظام تحديد المواقع العالمي (GPS).
- نقل البيانات في الوقت الحقيقي:نقل البيانات إلى المحطات الأرضية باستخدام WiFi.
- الملاحة البصرية:أنظمة الكاميرا المزدوجة للملاحة الداخلية الدقيقة وتجنب العوائق.
- عناصر التحكم القابلة للبرمجة:استخدم Dronekit-Python لإنشاء أوامر طيران مخصصة.
- محاكاة النظام:دمج محاكاة SITL لاختبار الوظائف بشكل سلس.
تحديد
| المعلمة | تفاصيل |
|---|---|
| نموذج | سي كيو 230 |
| قاعدة العجلات | 230 ملم |
| بطارية | 4 ثانية (16.8 فولت) |
| وقت الرحلة | 7 دقائق |
| سعة الحمولة | 200 جرام |
| مقاومة الرياح | المستوى 3-4 |
| السرعة القصوى | 20 كم/س |
| أقصى ارتفاع للطيران | 120م |
| دقة تحديد المواقع | 2-3 متر (نظام تحديد المواقع العالمي) |
| وزن | 612 جرام |
| نطاق التحكم عن بعد | 700م |
طَرد
النسخة الأساسية
- وحدة تحكم الطيران Pixhawk 2.4.8 ×1
- M8N نظام تحديد المواقع العالمي (GPS) ×1
- وحدة الطاقة Ledi MINI PIX ×1
- قياس عن بعد واي فاي CUAV ×1
- 30 أمبير ESC ×4
- 5045 مروحة ×4
- إطار CQ230 ×1
- شاحن التوازن A400 ×1
- بطارية 4S 2300 مللي أمبير ×1
- محرك 2205 ×4
- جهاز التحكم عن بعد FS-i6 ×1
- جرس إنذار BB ×1
- وحدة التدفق البصري MF-01 ×1
النسخة المرئية
- بيكس هوك 2.4.شركة 8 للطيرانمراقب ×1
- نظام تحديد المواقع العالمي (جي بي إس) M8N ×1
- وحدة الطاقة Ledi MINI PIX ×1
- كاميرا CS ×1
- 30 أمبير ESC ×4
- 5045 مروحة ×4
- إطار CQ230 ×1
- جرس إنذار BB ×1
- وحدة التدفق البصري MF-01 ×1
- شاحن التوازن A400 ×1
- بطارية 4S 2300 مللي أمبير ×1
- محرك 2205 ×4
- جهاز التحكم عن بعد FS-i6 ×1
- كمبيوتر راسبي 4B-4G على متن الطائرة ×1 مجموعة
- كاميرا T265 البصرية ×1
التطبيقات
- توصيل:نقل العناصر خفيفة الوزن بكفاءة.
- التطوير التعليمي:مثالي للطلاب والباحثين لاستكشاف أنظمة الطائرات بدون طيار.
- المعالجة البصرية:استخدم OpenCV لبث الفيديو وتحليله بشكل متقدم.
- تجارب الملاحة:تجربة تتبع الرحلات الجوية والموقع باستخدام نظام تحديد المواقع العالمي (GPS) المستقل.
ملاحظات إضافية
- يتضمن النظام Ubuntu 20.04 لواجهة برمجة محسّنة.
- يضمن النظام البيئي القوي لـ Ardupilot إمكانية التوسع والتنوع في تطبيقات الطائرات بدون طيار.
- مجموعة تعليمية كاملة مع دروس تعليمية مقدمة للمبتدئين والمحترفين.
تفاصيل
نظام الطائرات بدون طيار مفتوح المصدر CQ230

Pixhawk: نظام أجهزة الطائرات بدون طيار
يستخدم وحدة التحكم Pixhawk 2.4.8، المجهزة بمعالج 32 بت قياسي جديد STM32F427 ومقترنة بمقياس الضغط الجوي 5611. إنها وحدة تحكم مفتوحة المصدر فعالة من حيث التكلفة مع خيارات واجهة غنية.

ArduPilot: نظام برمجي للطائرات بدون طيار
ويستخدم النظام البرمجي للطائرة بدون طيار - وهو في الأساس برنامج التحكم الثابت - مشروع ArduPilot مفتوح المصدر والذي تم اعتماده على نطاق واسع.
(يوفر ArduPilot نظامًا مفتوح المصدر متقدمًا وكامل الميزات وموثوقًا به لنظام الطيار الآلي.)
يمكنه التحكم في جميع أنظمة الطائرات بدون طيار التي يمكن تخيلها. بالنسبة لأولئك الذين يحبون التكنولوجيا والطائرات بدون طيار والاستكشاف، فإن فهم ArduPilot سيقدم لك عالمًا رائعًا وجذابًا.

تم تركيب ArduPilot في أكثر من مليون نظام طائرات بدون طيار في جميع أنحاء العالم. وهو مزود بأدوات متقدمة لتسجيل البيانات وتحليلها ومحاكاةها، وهو نظام طيار آلي موثوق به ومختبر تمامًا. كما تستخدمه أيضًا المنظمات والشركات الكبرى مثل وكالة ناسا وإنتل وإنسيتو وبوينج والعديد من المعاهد والجامعات حول العالم للاختبار والتطوير.

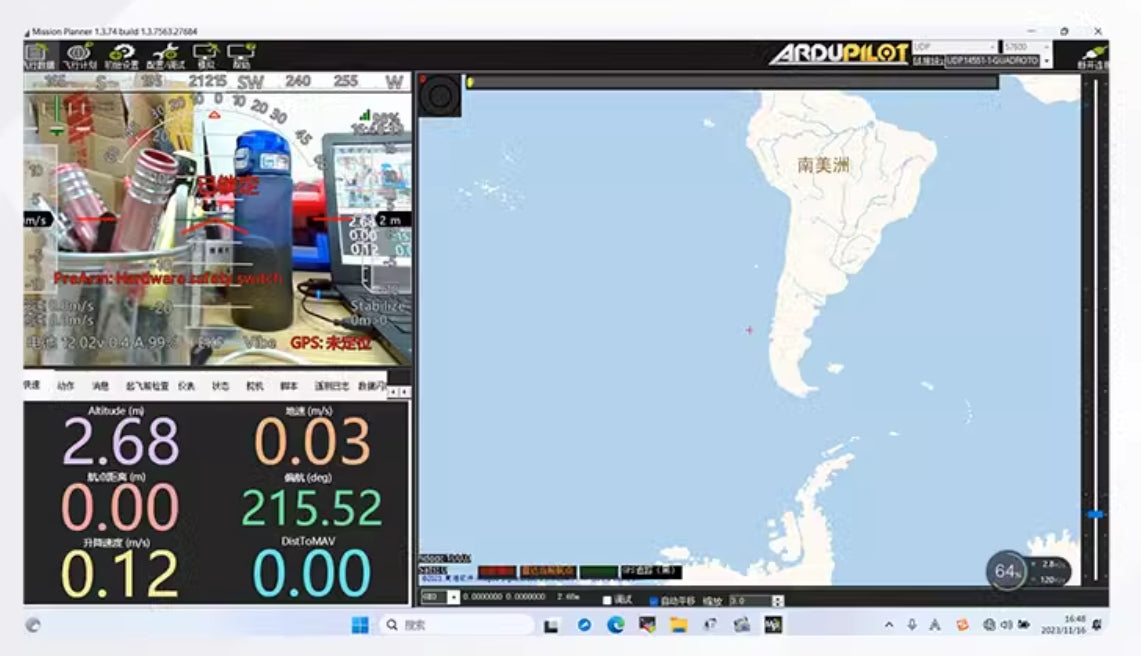
مخطط المهمة محطة التحكم الأرضية
سمات:
- أدوات ضبط الطائرات بدون طيار وإعداد المعلمات؛
- تعيين مسارات الطيران على الخرائط، مما يتيح للطائرات بدون طيار اتباع المسارات المحددة مسبقًا تلقائيًا؛
- حدد أوامر المهمة من القوائم المنسدلة للتحكم في الطائرة بدون طيار؛
- تنزيل السجلات وتحليلها؛
- إجراء عمليات المحاكاة باستخدام نظام SITL (البرمجيات في الحلقة)؛
- هناك المزيد من الميزات في انتظار اكتشافك، والاحتمالات لا تنتهي هنا...


| الميزات المحددة مسبقًا | النسخة الأساسية | النسخة المرئية |
|---|
| رسم خطي | ✓ | ✓ |
| تثبيت الارتفاع، التحليق، التثبيت | ✓ | ✓ |
| العودة إلى الوطن، العودة الآمنة | ✓ | ✓ |
| الهبوط، هبوط البطارية المنخفضة | ✓ | ✓ |
| تحديد المواقع في الهواء الطلق وتحديد مسار الرحلة | ✓ | ✓ |
| Dronekit-Python التحكم القابل للبرمجة | ✓ | ✓ |
| قياس عن بعد عبر شبكة WiFi لنقل البيانات في الوقت الفعلي (نطاق 5 أمتار تقريبًا) | ✗ | ✓ |
| تحديد موضع التدفق البصري الداخلي، تثبيت الارتفاع بالليزر | ✓ | ✓ |
| نظام الملاحة ثنائي المواقع المرئية الداخلي، نقاط تثبيت MP، مسار الرحلة، الهبوط الدقيق مع التعرف على رمز الاستجابة السريعة | ✗ | ✓ |
مناسبة للطيران الداخلي
تصميم مضغوط بأبعاد 360 مم × 360 مم × 300 مم، مثالي للعمليات في المساحات الصغيرة.

إطار من ألياف الكربون، قوي ومقاوم للسقوط

يضمن تصميم حلقة مكافحة الاصطدام حماية المحرك وشفرات المروحة بشكل فعال لضمان سلامة الطيران؛

إمكانية التوسعة المحسّنة للتطوير الوظيفي متعدد السيناريوهات
استنادًا إلى النموذج الأساسي، يضيف النظام Raspberry Pi 4B ويدمج نظام Raspberry Pi. يتضمن هذا النظام:
- أوبونتو 20.04 (نظام تشغيل مفتوح المصدر بواجهة رسومية)
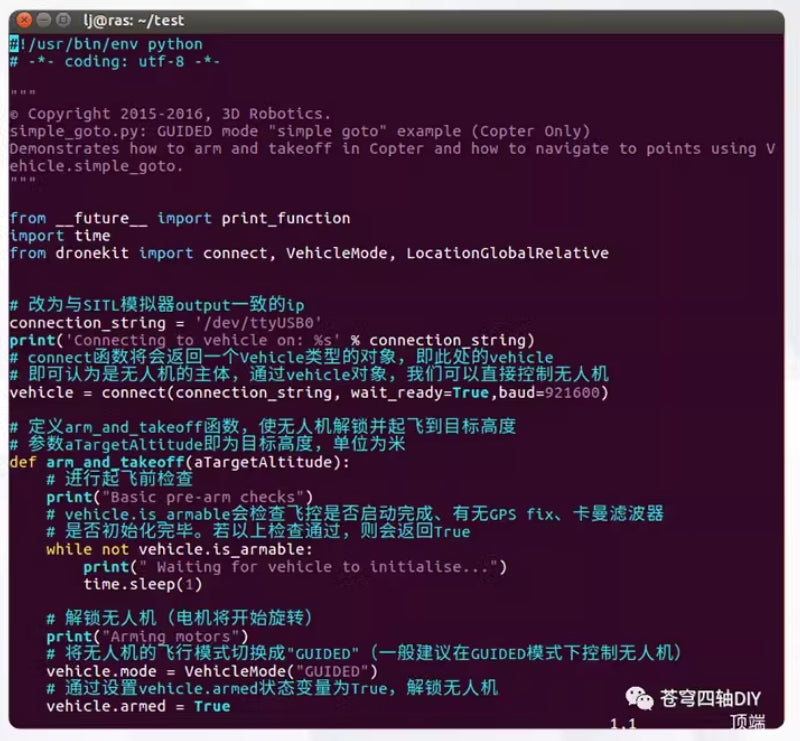
- درونكيت-بايثون (مكتبة بايثون لبرمجة التحكم في الطائرات بدون طيار باستخدام Dronekit)
- بايمافلينك (تنفيذ Python لبروتوكول MAVLink، مما يتيح التحكم في الطائرات بدون طيار القابلة للبرمجة باستخدام Pymavlink)
- روس (نظام تشغيل الروبوت)
- مافروس (بروتوكول اتصال للتحكم في الطائرات بدون طيار عبر ROS)
- جيستريمر (نقل الفيديو عبر الإنترنت بزمن انتقال منخفض)
- جهاز توجيه مافلينك (يقوم بتوزيع بيانات MAVLink الخاصة بوحدة التحكم في الطيران على نقاط نهاية مختلفة)
- أوبن سي في (مكتبة برمجيات مفتوحة المصدر لمعالجة الرؤية الحاسوبية)

بناءً على النظام المذكور أعلاه، يمكن للطائرة بدون طيار تحقيق:
- التحكم في الطائرات بدون طيار القابلة للبرمجة باستخدام Dronekit-Python
2. معالجة بصرية مفتوحة للسيرة الذاتية
تمت إضافة كاميرا CSI، مما يتيح نقل الصور ومعالجتها لاحقًا:
- يمكن التقاط التدفقات المرئية باستخدام Raspberry Pi ومعالجتها باستخدام أدوات مثل OpenCV.
- يمكن أيضًا إرسال تدفقات الفيديو عالية الدقة في الوقت الفعلي مرة أخرى إلى جهاز كمبيوتر للمعالجة أو إرسالها إلى جهاز محمول للمراجعة.

3. نقل الفيديو عالي الدقة في الوقت الفعلي
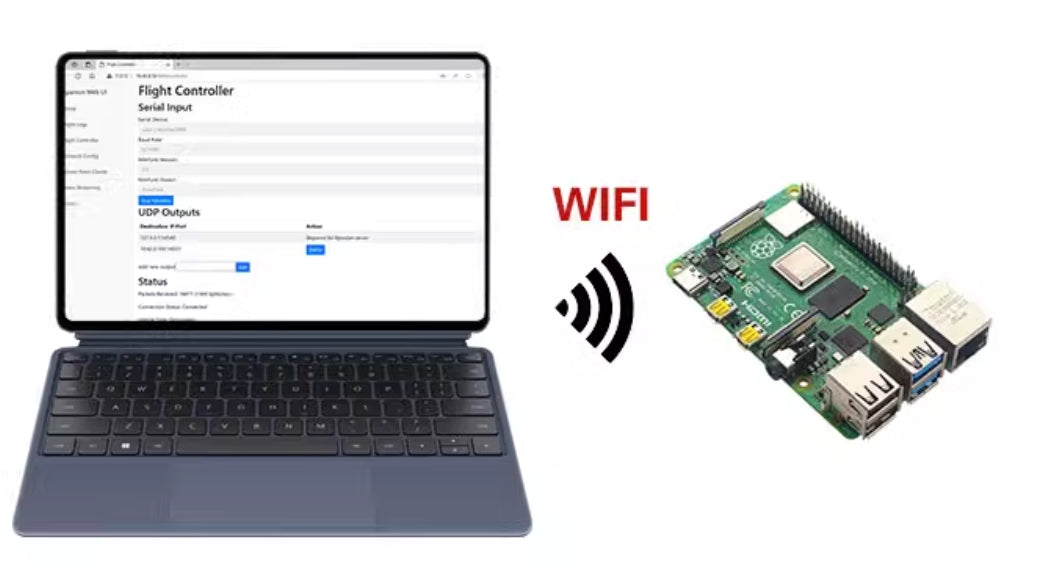
4.مراقبة بيانات المحطة الأرضية
يمكن تحقيق الاتصال ونقل الصور بين شبكة WiFi ومحطة الكمبيوتر الأرضية (MP) دون الحاجة إلى وحدات إرسال إضافية. بعد اتصال الكمبيوتر بنقطة اتصال WiFi الخاصة بـ 4B، يمكن بدء نقل البيانات والصور من خلال الوصول إلى 10.42.0.10:3000 عبر متصفح الويب.
5. تطوير ميزات إضافية والتحقق من الخوارزمية بناءً على النظام مفتوح المصدر المذكور أعلاه
دروس تعليمية تدعم الإصدار المرئي:
بالإضافة إلى دروس الإصدار الأساسي، يتم أيضًا توفير دروس تمهيدية للمعالجة المرئية لـ Raspberry Pi.