


وحدة تحكم الطيران MATEKSYS H7A3-SLIM - ICM42688P - 30x30
وحدة تحكم الطيران MATEKSYS H7A3-SLIM - ICM42688P - 30x30
MATEKSYS
تعذر تحميل توفر الالتقاط
وحدة التحكم في الطيران MATEKSYS H7A3-SLIM تقدم أداءً عاليًا في تصميم مدمج بحجم 30x30 مم. تتميز بوحدة المعالجة STM32H7A3RIT6، معالج Cortex-M7 بتردد 280 ميجاهرتز، ذاكرة RAM بسعة 1.4 ميجابايت، وذاكرة فلاش بسعة 2 ميجابايت. مع وحدة ICM42688P IMU، بارومتر SPL06-001، OSD AT7456E، وصندوق أسود بسعة 128 ميجابايت، توفر بيانات دقيقة وتسجيلًا وفيرًا. تتضمن وحدة التحكم 6 منافذ UART، 11 مخرج PWM، 1 I2C، 1 منفذ CAN، و4 قنوات ADC. كما تحتوي على ثلاثة مصابيح LED حالة، منفذ USB Type-C، ومخرج 9V قابل للتبديل. مع نمط تركيب بحجم 30.5 × 30.5 مم، ثقوب بحجم 4 مم، حلقات بحجم 3 مم، ووزن لا يتجاوز 7 جرام، فهي مثالية لسباقات FPV والطيران الحر. يتضمن ملف خطوة ثلاثية الأبعاد للتكامل المخصص.
الميزات
- عرض على الشاشة
- تركيب 30x30
- تصميم مدمج
- الاتصال
- خفيف الوزن
المواصفات
المواصفات
- MCU: STM32H7A3RIT6، 280MHz Cortex-M7، 1.4MB RAM، 2MB Flash
- IMU: ICM42688P
- بارو: SPL06-001
- OSD: AT7456E
- Blackbox: 128MB Flash (1G-bit NAND)
- 6x Uarts (1,2,3,4, 5, 6) مع عكس مدمج.
- 11x مخرجات PWM
- 1x I2C
- 1x CAN
- 4x ADC (VBAT، Current، VB2، Cur2)
- 3x LEDs لحالة FC (أزرق، أحمر) ومؤشر 3.3V (أحمر)
- USB Type-C(USB2.0)
- 8 مخرجات PWM على موصل 2x JST-SH1.0_8pin لعدد 2x 4in1 ESC
- موصل 1x JST-GH1.25_4pin (5V/CAN-H/CAN-L/G)
- مفتاح تشغيل/إيقاف 9V قابل للتبديل
- يدعم الفيديو الرقمي OSD أي UART احتياطي
الطاقة
- مدخل Vbat: 6~36V (2~8S LiPo)
- BEC: 5V 2A مستمر. (حد أقصى 3A)
- BEC: 9V 2A مستمر. (حد أقصى 3A)
- LDO 3.3V: حد أقصى 200mA
- لا يوجد مستشعر تيار مدمج
- دبوس ADC VB2 يدعم حد أقصى 69V (مقسم الجهد: 1K:20K)
برنامج تشغيل FC
- ArduPilot: MATEKH7A3 (4.6 أو أحدث)
- ArduPlane https://firmware.ardupilot.org/Plane/beta/MatekH7A3/
- ArduCopter &https://firmware.ardupilot.org/Copter/beta/MatekH7A3/
- الوميض باستخدام STM32CubeProgrammer
فيزيائي
- تركيب: 30.5 × 30.5 مم، Φ4 مم مع حلقات مطاطية Φ3 مم
- الأبعاد: 36 × 36 × 5 مم
- الوزن: 7 جرام
- خطوة 3D H7A3-SLIM_step.zip
بما في ذلك
- 1x H7A3-SLIM
- 6x حلقات مطاطية سيليكون M4 إلى M3
- 2x JST-SH1.0_8pin كابل، 5 سم، & موصلات 8pin
- 1x كابل JST-GH-4P إلى JST-GH-4P لمنفذ CAN، 20 سم
تفاصيل

وحدة التحكم في الطيران MATEKSYS H7A3-SLIM تستخدم معالج STM32H7A3 مع وحدة IMU ICM42688P ومنفذ USB-C في نمط تركيب 30.5 مم.

وحدة التحكم في الطيران MATEKSYS H7A3-SLIM تستخدم تصميم مدمج 30x30 مع منفذ USB-C وألواح موضوعة بوضوح لتسهيل التوصيلات.

MATEKSYS H7A3-SLIM تستخدم موصلات JST-SH مزدوجة 1.0 8-pin بالإضافة إلى منفذ JST-GH 4-pin ومنفذ USB Type-C لتسهيل التوصيلات والإعداد.

MATEKSYS H7A3-SLIM تستخدم ألواح لحام ومنافذ موضوعة بوضوح لتوصيلات الكاميرا/VTx الفيديو، UARTs، CAN، وتوصيلات الطاقة.
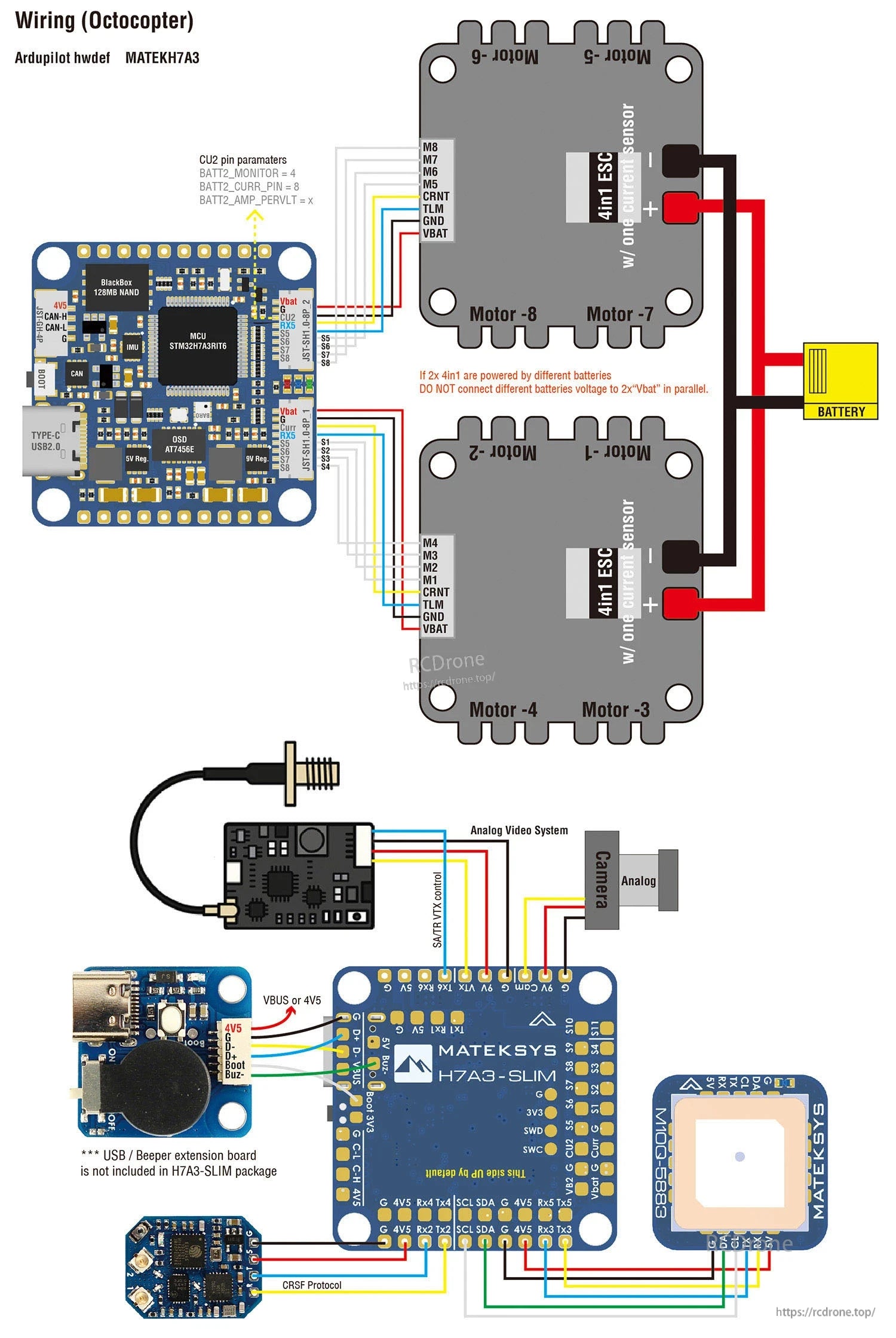
MATEKSYS H7A3-SLIM يستخدم وسادات موضوعة بوضوح لتوصيل وحدات ESC مزدوجة 4 في 1، طاقة VBAT، GPS، جهاز الاستقبال، ومكونات الفيديو التناظري.

تخطيط ArduPilot
| ArduPilot | ||||||
| PWM | S1 | PWM1 GPIO50 | مدخل/خرج متحمل 5 فولت | TIM1_CH2 | DMA/Bi-DShot | المجموعة 1 |
| S2 | PWM2 GPIO51 | مدخل/خرج متحمل 5 فولت | TIM1_CH3 | DMA/Bi-DShot | ||
| S3 | PWM3 GPIO52 | مدخل/خرج متحمل 5 فولت | TIM2_CH1 | DMA/Bi-DShot | المجموعة 2 | |
| S4 | PWM4 GPIO53 | مدخل/خرج متحمل 5 فولت | TIM2_CH2 | DMA/Bi-DShot | ||
| S5 | PWM5 GPIO54 | مدخل/خرج متحمل 5 فولت | TIM3_CH3 | DMA/Bi-DShot | Gourp3 | |
| S6 | PWM6 GPIO55 | مدخل/خرج متحمل 5 فولت | TIM3_CH4 | DMA/Bi-DShot | ||
| S7 | PWM7 GPIO56 | مدخل/خرج متحمل 5 فولت | TIM3_CH1 | DMA/Bi-DShot | ||
| S8 | PWM8 GPIO57 | مدخل/خرج متحمل 5 فولت | TIM3_CH2 | DMA/Bi-DShot | ||
| S9 | PWM9 GPIO58 | مدخل/خرج متحمل 5 فولت | TIM4_CH1 | DMA/DShot | Group4 | |
| S10 | PWM10 GPIO59 | مدخل/خرج متحمل 5 فولت | TIM4_CH2 | DMA/DShot | ||
| S11 | PWM11 GPIO60 | 5 فولت متوافق مع الإدخال/الإخراج | TIM16_CH1 | DMA/DShot | المجموعة 5 | |
| PWM1~PWM11 تدعم Dshot و PWM.ومع ذلك، فإن خلط Dshot وعمل PWM العادي للمخرجات مقيد في مجموعات، أي أن تمكين Dshot لمخرج في مجموعة يتطلب أن تكون جميع المخرجات في تلك المجموعة مكونة ومستخدمة كـ Dshot، بدلاً من مخرجات PWM. إذا تم خلط السيرفو والمحرك في نفس المجموعة، تأكد من أن هذه المجموعة تعمل بأدنى تردد PWM وفقًا لمواصفات السيرفو. بمعنى آخر. إذا كان السيرفو يدعم حد أقصى 50 هرتز، يجب أن يعمل ESC عند 50 هرتز في هذه المجموعة. |
||||||
| PINIO | مفتاح 9 فولت | GPIO81 | RELAY1_PIN | 81 | ||
| ADC | لوحة Vbat | BATT_VOLTAGE_SENS | 6~36 فولت | BATT_VOLT_PIN BATT_VOLT_MULT |
10 21.0 |
|
| لوحة التيار | BATT_CURRENT_SENS | 0~3.3V | دبوس_تيار_البطارية أمبير_لكل_فولت |
11 X |
||
| وسادة VB2 | حساس_جهد_البطارية2 | 0~69V | دبوس_جهد_البطارية2 مضاعف_جهد_البطارية2 |
18 21.0 |
||
| وسادة CU2 | حساس_تيار_البطارية2 | 0~3.3V | BATT2_CURR_PIN BATT2_AMP_PERVLT |
8 X |
||
| I2C | SCL/SDA | I2C3 | 5V tolerant I/O | مدخل/مخرج يتحمل 5 فولتعلى متن بارومتر SPL06-001 | العنوان | 0x76 |
| سرعة الهواء الرقمية I2C MS4525 DLVR-L10D |
ARSPD_BUS ARSPD_TYPE ARSPD_TYPE |
0 1 9 |
||||
| مقياس المغناطيسية | COMPASS_AUTODEC | 1 | ||||
| CAN | C-H/C-L | CAN2 | 5V tolerant I/O | مدخل/مخرج يتحمل 5 فولتCAN | CAN_D1_PROTOCOL CAN_P1_DRIVER |
1 1 |
| يمكن GPS يمكن البوصلة يمكن مستشعر سرعة الهواء |
نوع GPS قناع نوع البوصلة نوع ARSPD |
9 0 8 |
||||
| UART | USB | USB | وحدة التحكم | بروتوكول SERIAL0 | 2 | |
| TX1 RX1 | USART1 مع DMA | مدخل/خرج متوافق مع 5 فولت | التيليمتري | بروتوكول SERIAL1 | 2 | |
| TX2 RX2 | USART2 مع DMA | مدخل/خرج متوافق مع 5 فولت | مدخل RC/المستقبل | بروتوكول SERIAL2 | 23 | |
| TX3 RX3 | USART3 مع DMA | مدخل/خرج متوافق مع 5 فولت | GPS | بروتوكول SERIAL3 | 5 | |
| TX4 RX4 | UART4 بدون DMA | مدخلات/مخرجات تتحمل 5 فولت | احتياطي | بروتوكول SERIAL4 | -1 | |
| TX5 RX5 | UART5 بدون DMA | مدخلات/مخرجات تتحمل 5 فولت | احتياطي | بروتوكول SERIAL5 | -1 | |
| TX6 RX6 | USART6 بدون DMA | مدخلات/مخرجات تتحمل 5 فولت | احتياطي | بروتوكول SERIAL6 | -1 | |
مدخل RC
تم تكوين مدخل RC على USART2 (SERIAL2).يدعم جميع بروتوكولات RC التسلسلية. SERIAL2_PROTOCOL=23 بشكل افتراضي.
- PPM غير مدعوم.
- CRSF يتطلب اتصال Tx2 & Rx2، ويجب تعيين SERIAL2_OPTIONS إلى "0" (افتراضي).
- SBUS/DSM/SRXL يتصل بدبوس Rx2، ولكن SBUS يتطلب تعيين SERIAL2_OPTIONS إلى "3".
- FPort يتطلب الاتصال بـ Tx2، ويجب تعيين SERIAL2_OPTIONS إلى "7". إذا لم تعمل Telemetry، حاول تعيين SERIAL7_OPTIONS = 135.
- SRXL2 يتطلب اتصالاً بـ Tx2، ويوفر تلقائيًا Telemetry. قم بتعيين SERIAL2_OPTIONS إلى "4".
- يمكن استخدام أي UART أيضًا لاتصالات نظام RC في ArduPilot، وهو متوافق مع جميع البروتوكولات باستثناء PPM. انظر أنظمة التحكم عن بعد للمزيد من التفاصيل.
مرحلة ArduPilot (PINIO)
- الإخراج 9V مفعل بشكل افتراضي
- PC13 PINIO1 إخراج GPIO(81) // طاقة 9V switche.g.
- وظيفة RELAY1 1
- RELAY1_PIN 81 // PINIO1 GPIO
- RC7_OPTION 28 // تشغيل/إيقاف المرحل، استخدم CH7 من جهاز الإرسال لتعيين 9V تشغيل/إيقاف
سيتم تفعيل الميزة المكونة عندما تصبح قيمة pwm من المفتاح الإضافي أعلى من 1800. سيتم إلغاء تفعيلها عندما تنخفض القيمة إلى أقل من 1200.
تحقق من قيمة pwm المرسلة من جهاز الإرسال عندما يكون المفتاح مرتفعًا ومنخفضًا باستخدام إعدادات البداية في مخطط المهمة >> الأجهزة الإلزامية >> شاشة معايرة الراديو.إذا لم يرتفع أكثر من 1800 أو ينخفض أقل من 1200، فمن الأفضل ضبط نقاط نهاية السيرفو في جهاز الإرسال.
Related Collections


