







P600 ড্রোন বৈজ্ঞানিক গবেষণা ড্রোন - ROS AI এক্সপেরিমেন্টাল সেকেন্ডারি প্রোগ্রামিং ইন্ডাস্ট্রিয়াল ডেভেলপমেন্ট প্ল্যাটফর্ম স্টুডিও ল্যাব ড্রোন DIY কিট
P600 ড্রোন বৈজ্ঞানিক গবেষণা ড্রোন - ROS AI এক্সপেরিমেন্টাল সেকেন্ডারি প্রোগ্রামিং ইন্ডাস্ট্রিয়াল ডেভেলপমেন্ট প্ল্যাটফর্ম স্টুডিও ল্যাব ড্রোন DIY কিট
RCDrone
পিকআপের উপলভ্যতা লোড করা যায়নি
ওভারভিউ
দ P600 বৈজ্ঞানিক গবেষণা ড্রোন বৈজ্ঞানিক গবেষণা, শিল্প উন্নয়ন এবং এআই পরীক্ষা-নিরীক্ষার জন্য ডিজাইন করা একটি অত্যাধুনিক প্ল্যাটফর্ম। একটি উচ্চ কর্মক্ষমতা সঙ্গে সজ্জিত NVIDIA Jetson Orin NX কম্পিউটিং মডিউল, এটা বিতরণ 100 টপস কম্পিউটিং শক্তি, এটি উন্নত AI অ্যাপ্লিকেশনের জন্য আদর্শ করে তোলে। এই ড্রোন বৈশিষ্ট্য একটি 40x অপটিক্যাল জুম জিম্বাল ক্যামেরা উচ্চ-রেজোলিউশন ইমেজিংয়ের জন্য, 3D LiDAR SLAM সুনির্দিষ্ট ম্যাপিংয়ের জন্য, এবং RTK পজিশনিং সেন্টিমিটার-স্তরের নির্ভুলতার জন্য। এর ইন্টিগ্রেটেড Prometheus V2 সফ্টওয়্যার এবং SpireCV ভিশন লাইব্রেরি মাধ্যমিক প্রোগ্রামিং সমর্থন করে, এটি ডেভেলপারদের জন্য একটি বহুমুখী টুল তৈরি করে। পর্যন্ত একটি ফ্লাইট সময় সঙ্গে 21 মিনিট, ক 600 মিমি তির্যক অক্ষ, এবং একটি শক্তিশালী 4.05 কেজি টেকঅফ ওজন, P600 গতিশীল গবেষণা এবং উন্নয়ন পরিবেশের জন্য অপ্টিমাইজ করা হয়.
স্পেসিফিকেশন
বিমান
| বৈশিষ্ট্য | বিস্তারিত |
|---|---|
| বিমানের ধরন | কোয়াডকপ্টার |
| টেকঅফ ওজন | প্রায় 4.05 কেজি (ব্যাটারি সহ) |
| তির্যক অক্ষ দূরত্ব | 600 মিমি |
| মাত্রা | দৈর্ঘ্য 469 মিমি, প্রস্থ 469 মিমি, উচ্চতা 400 মিমি |
| সর্বোচ্চ হোভার সময় | প্রায় 21 মিনিট |
| হোভারিং সঠিকতা | RTK: ±0.015 মি (অনুভূমিক), ±0.01 মিটার (উল্লম্ব) 3D LiDAR SLAM: ±0.2 মিটার (অনুভূমিক), ±0.1 মিটার (উল্লম্ব) |
| অপারেটিং তাপমাত্রা | 6°C ~ 40°C |
| প্রধান MCU চিপ | STM32H743VIT6 / 216 MHz / 2M প্রোগ্রাম স্টোরেজ / 512 KB ডেটা স্টোরেজ |
| আইএমইউ | ICM20689 |
| ব্যারোমিটার | BMP388 |
| এমটিডি | AT24C64 |
| I/O ইন্টারফেস | অন্তর্নির্মিত PX4IO-V2, 8 সমর্থন করেPWM ইন্টারফেস, 1RC ইন্টারফেস (SBus, PPM, DSM সমর্থন করে) বাহ্যিক ইন্টারফেস: 3UART (GH1.25 6-পিন), ১CAN (GH1.25 4-পিন), ফ্লাইট কন্ট্রোল ইউএসবি ইন্টারফেস (টাইপ-সি) |
অনবোর্ড কম্পিউটার
| বৈশিষ্ট্য | বিস্তারিত |
|---|---|
| নাম | Allspark-Orin NX অনবোর্ড কম্পিউটার |
| মডেল | IA160_V1 |
| ওজন | প্রায় 188 গ্রাম |
| মাত্রা | 102.5 মিমি × 62.5 মিমি × 31 মিমি (ফ্যান সহ) |
| প্রসেসর | এনভিডিয়া জেটসন ওরিন এনএক্স |
| স্মৃতি | 16 জিবি LPDDR5 |
| কম্পিউটিং শক্তি | 100 টপস |
| জিপিইউ | 1024-কোর NVIDIA অ্যাম্পিয়ার আর্কিটেকচার GPU-এর ইন্টিগ্রেটেড 32 টেনসর কোর |
| সিপিইউ | 8-কোর Arm® Cortex®-A78AE v8.2 64-বিট CPU (2MB L2 + 4MB L3) |
| এসএসডি | 128 জিবি (এম।2 ইন্টারফেস, প্রসারণযোগ্য) |
| ইথারনেট | 100 Mbps x2 (1 ডেডিকেটেড ইথারনেট পোর্ট, 1 বিনিময়যোগ্য) |
| ওয়াইফাই | 5জি |
| প্রদর্শন | মাইক্রো HDMI (1920*1080P) |
| ইউএসবি পোর্ট | USB2.0: Type-A x1, Type-C x1 USB2.0: OTG x1 |
| পাওয়ার সাপ্লাই | 10~26V @ 3A |
পাওয়ার ব্যাটারি
| বৈশিষ্ট্য | বিস্তারিত |
|---|---|
| মডেল | LPB610HV |
| ক্ষমতা | 10000 mAh |
| ব্যাটারির ওজন | 1.2 কেজি |
| অপারেটিং ভোল্টেজ | 22V~26.1V |
| স্টোরেজ ভোল্টেজ | 23.1V |
| মাত্রা | দৈর্ঘ্য 180 মিমি, প্রস্থ 90 মিমি, উচ্চতা 63 মিমি |
রিমোট কন্ট্রোলার
| বৈশিষ্ট্য | বিস্তারিত |
|---|---|
| মডেল | H16 |
| চ্যানেল | 16 |
| ফ্রিকোয়েন্সি | 2.400~2.483 GHz |
| অপারেটিং ভোল্টেজ | 4.2V |
| ব্যাটারি | 20000 mAh |
| চার্জিং পোর্ট | টাইপ-সি 9V-2A |
| ওজন | 1034 গ্রাম |
| মাত্রা | দৈর্ঘ্য 272 মিমি, প্রস্থ 183 মিমি, উচ্চতা 94 মিমি |
যোগাযোগ লিঙ্ক
| বৈশিষ্ট্য | বিস্তারিত |
|---|---|
| মডেল | R16 |
| যোগাযোগের দূরত্ব | প্রায় 600 মিটার, ব্যান্ডউইথ 3.5 Mbps |
| অপারেটিং ভোল্টেজ | 7.2V~72V |
| ইন্টারফেস | 2UART, 1ইথারনেট, ২এইচডিএমআই, ২টাইপ-সি |
| মাত্রা | দৈর্ঘ্য 76 মিমি, প্রস্থ 69 মিমি, উচ্চতা 11 মিমি |
জিম্বাল ক্যামেরা
| বৈশিষ্ট্য | বিস্তারিত |
|---|---|
| মডেল | GX40 |
| জিম্বাল মাত্রা | দৈর্ঘ্য 85.8 মিমি, প্রস্থ 86 মিমি, উচ্চতা 129.3 মিমি |
| GCU মাত্রা | দৈর্ঘ্য 45.4 মিমি, প্রস্থ 40 মিমি, উচ্চতা 13.5 মিমি |
| জিম্বাল ওজন | 405 গ্রাম |
| জিসিইউ ওজন | 18.6 গ্রাম |
| অপারেটিং ভোল্টেজ | 14V~53V |
| স্ট্রিমিং প্রোটোকল | RTSP (ডিফল্ট) |
| এনকোডিং বিন্যাস | H.264 / H.264H / H.264B / H.265 / MJPEG |
| রেজোলিউশন | - 4K30fps - 1080P@30fps - SCGA (12801024)@30fps <br> - ১.3M (1280960)@30fps - 720P@30fps |
| বিটরেট | [email protected], [email protected] |
লেন্স
| বৈশিষ্ট্য | বিস্তারিত |
|---|---|
| টাইপ | অপটিক্যাল জুম লেন্স |
| ফোকাল দৈর্ঘ্য | 4.8~48 মিমি |
| অ্যাপারচার (F/NO) | f1.7~f3.2 |
| তির্যক FOV (D) | 67.2°~7.6° |
| উল্লম্ব FOV (V) | 36.1°~3.7° |
| অনুভূমিক FOV (H) | 60.2°~6.6° |
| অপটিক্যাল জুম অনুপাত | 10x |
ইমেজ সেন্সর
| বৈশিষ্ট্য | বিস্তারিত |
|---|---|
| সেন্সর প্রকার | CMOS |
| কার্যকরী পিক্সেল | 8.29M |
| সেন্সর সাইজ | 1/2.8'' |
| পিক্সেল সাইজ | 1.45×1.45 (μm) |
| ইলেকট্রনিক শাটার গতি | 1~1/30000s |
ইলুমিনেটর
| বৈশিষ্ট্য | বিস্তারিত |
|---|---|
| টাইপ | লেজার |
| তরঙ্গদৈর্ঘ্য | 850±10 nm |
| শক্তি | 0.8W |
| আলোকসজ্জা দূরত্ব | ≤200 মি |
RTK
| বৈশিষ্ট্য | বিস্তারিত |
|---|---|
| মডেল | M15-RTK |
| ওজন | 90 গ্রাম |
| মাত্রা | দৈর্ঘ্য 80 মিমি, প্রস্থ 50 মিমি, উচ্চতা 20 মিমি |
| সমর্থিত স্যাটেলাইট প্রকার | বিডিএস/জিপিএস/গ্লোনাস/কিউজেডএসএস |
| পাওয়ার সাপ্লাই | 9~36V (12V প্রস্তাবিত) |
| অ্যান্টেনা সংযোগকারী | SMA-F |
| কার্যকরী পোর্ট | UARTx2, CANx1, USB2.0x1 |
চার্জার
| বৈশিষ্ট্য | বিস্তারিত |
|---|---|
| মডেল | C1-XR |
| এসি ইনপুট ভোল্টেজ | 100~240V |
| ডিসি ইনপুট ভোল্টেজ | 11~18V |
| মাত্রা | দৈর্ঘ্য 130 মিমি, প্রস্থ 115 মিমি, উচ্চতা 61 মিমি |
| ওজন | 380 গ্রাম |
| চার্জিং কারেন্ট | 01A~10A |
| সমর্থিত ব্যাটারি কোষ | 1~6 কোষ |
3D LiDAR
| বৈশিষ্ট্য | বিস্তারিত |
|---|---|
| মডেল | MID360 |
| লেজার তরঙ্গদৈর্ঘ্য | 905 এনএম |
| সনাক্তকরণ পরিসীমা | 40 মি (105% প্রতিফলিততায়) |
| ফিল্ড অফ ভিউ (FOV) | অনুভূমিক: 360°, উল্লম্ব: -7°~52° |
| ন্যূনতম পরিসর | 0.1 মি |
| পয়েন্ট ক্লাউড রেট | 10 Hz (সাধারণ) |
| প্রতি সেকেন্ডে পয়েন্ট | 200,000 পয়েন্ট/সে |
| ডেটা ইন্টারফেস | 100 BASE-TX ইথারনেট |
| ডেটা সিঙ্ক্রোনাইজেশন | IEEE 1588-2008 (PTP v2), GPS |
| অভ্যন্তরীণ আইএমইউ | আইসিএম40609 |
| পাওয়ার সাপ্লাই | 7~27V |
| মাত্রা | 65 মিমি (W) x 65 মিমি (D) x 60 মিমি (H) |
| ওজন | 115 গ্রাম |
| অপারেটিং তাপমাত্রা | -20°C ~ 55°C |
সফ্টওয়্যার পরামিতি
অনবোর্ড কম্পিউটার
| বৈশিষ্ট্য | বিস্তারিত |
|---|---|
| মডেল | জেটসন ওরিন এনএক্স |
| অপারেটিং সিস্টেম | উবুন্টু 20.04 |
| ব্যবহারকারীর নাম | amov |
| পাসওয়ার্ড | amov |
| L4T সংস্করণ | 35.2.1 |
| জেটপ্যাক সংস্করণ | 5.1 |
| CUDA সংস্করণ | 11.4.315 |
| রিয়েলসেন্স এসডিকে | 2.50.0 |
| ROS সংস্করণ | noetic |
| OpenCV সংস্করণ | 4.7.0 |
| রিয়েলসেন্স ROS | 2.3।2 |
প্যাকেজ তালিকা
| নাম | স্পেসিফিকেশন/মডেল | পরিমাণ/একক |
|---|---|---|
| P600 প্রধান বিমান | P600-Allpark2-RTK-GX40-S3 | 1 সেট |
| M15-RTK গ্রাউন্ড টার্মিনাল | M15-RTK | 1 টুকরা |
| GNSS মাশরুম অ্যান্টেনা | মাশরুম অ্যান্টেনা | 1 টুকরা |
| GNSS অ্যান্টেনা এক্সটেনশন কেবল | অ্যান্টেনা এক্সটেনশন তারের | 1টি কেবল |
| H16 রিমোট কন্ট্রোলার | H16 | 1 ইউনিট |
| 6S 10000mAh পাওয়ার ব্যাটারি | 6S 10000mAh | 1 সেট |
| 3S 4000mAh লিথিয়াম ব্যাটারি | 3S 4000mAh | 1 সেট |
| স্মার্ট ব্যালেন্সিং চার্জার | C1-XR | 1 ইউনিট |
| নেটওয়ার্ক কেবল | 1.5 মি | 1টি কেবল |
| নিরাপত্তা দড়ি | 50 মি | 1 প্যাকেজ |
| HDMI বন্ধনী | / | 1 টুকরা |
| HDMI অ্যাডাপ্টার কেবল | / | 1 টুকরা |
| কম্পিউটার কনফিগারেশন | / | 1 টুকরা |
| 2D ড্রপিং প্লেট | 35×35 সেমি | 1 টুকরা |
| এভিয়েশন কেস | 740×540×510 মিমি | 1 সেট |
| আনুষঙ্গিক তারের প্যাক | / | 1 প্যাকেজ |
| সার্টিফিকেট | / | 1 শীট |
| ফাংশন টেস্ট চেকলিস্ট | / | 1 শীট |
বিস্তারিত
Prometheus 600 Scientific Research Drone Development Platform
দ Prometheus 600 Scientific Research Drone Development Platform (P600 হিসাবে উল্লেখ করা হয়েছে) P600 সিরিজের চতুর্থ প্রজন্মের পণ্য। এটি গভীরভাবে দুটি মূল প্রযুক্তিকে সংহত করে, প্রমিথিউস এবং SpireCV, এবং একটি 40x অপটিক্যাল জুম জিম্বাল ক্যামেরা দিয়ে সজ্জিত। এই সেটআপটি দীর্ঘ-দূরত্বের লক্ষ্য সনাক্তকরণ এবং ট্র্যাকিং, উচ্চ উচ্চতা থেকে স্বায়ত্তশাসিত অবতরণ এবং বায়বীয় ক্রুজ মিশন সক্ষম করে।
সিস্টেম 3D LiDAR SLAM সমর্থন করে ফাস্ট-লিও, উচ্চ-নির্ভুলতা 3D SLAM ম্যাপিং অর্জন করা। উপরন্তু, এটি বৈশিষ্ট্য EGO-Swarm মাল্টি-এজেন্ট সহযোগিতা অ্যালগরিদম, ড্রোন নেভিগেশনের সময় অন্দর এবং বহিরঙ্গন 3D স্থানিক পুনর্গঠন এবং বাধা এড়ানোর মতো বিভিন্ন পরিস্থিতিতে অ্যাপ্লিকেশনের অনুমতি দেয়।
এই উন্নত ক্ষমতা দ্বারা পরিপূরক হয় প্রমিথিউস পেশাদার গ্রাউন্ড স্টেশন, যা রিয়েল-টাইম ভিজ্যুয়াল ফিডব্যাক, অপারেশন মনিটরিং এবং ডাইনামিক প্যারামিটার অ্যাডজাস্টমেন্ট প্রদান করে, যা ডেভেলপারদের সেকেন্ডারি ডেভেলপমেন্ট আয়ত্ত করা এবং ত্বরান্বিত করা সহজ করে তোলে।

P600 ড্রোনের তিনটি সংস্করণ

অপটিক্যাল-ইলেক্ট্রনিক জিম্বালের নমনীয় নিয়ন্ত্রণ
GX40 জিম্বাল ক্যামেরা মাল্টি-সিনেরিও কন্ট্রোল সমর্থন করে এবং ওয়েপয়েন্ট নেভিগেশনের সময় লক্ষ্য অনুসন্ধান সক্ষম করতে চেইন-ভিত্তিক রিমোট কন্ট্রোলকে সংহত করে। ব্যবহার করে SpireCV ভিশন লাইব্রেরি, এটি লক্ষ্য সনাক্তকরণ এবং ট্র্যাকিং সহজতর করে, লক্ষ্যে জিম্বালের রিয়েল-টাইম লকিং অর্জন করে।
- রাতের আলোকসজ্জা
- টার্গেট ডিটেকশন এবং ট্র্যাকিং

টার্গেট ক্লিক এবং ট্র্যাকিং
ব্যবহার করে YOLOv5 সনাক্তকরণ অ্যালগরিদম এবং COCO সার্বজনীন ডেটাসেট ব্যবহার করে, লক্ষ্যগুলি সনাক্ত এবং ট্র্যাক করা হয়। দ ন্যানোট্র্যাক ট্র্যাকিং অ্যালগরিদম ট্র্যাকিংয়ের জন্য নির্বাচিত লক্ষ্যগুলিকে লক করে। অবস্থার পরিবর্তন ছাড়াই, 30 মিটার দূরের লক্ষ্যবস্তু চিহ্নিত এবং ট্র্যাক করা যেতে পারে। মাধ্যমে 40x অপটিক্যাল জুম এবং ইলেকট্রনিক জুম, দীর্ঘ-দূরত্ব লক্ষ্য সনাক্তকরণ এবং ট্র্যাকিং অর্জন করা হয়। ড্রোন ট্র্যাকিংয়ের সময়, প্রমিথিউস পেশাদার গ্রাউন্ড স্টেশন গতিশীল দূরত্ব-ভিত্তিক লক্ষ্য ট্র্যাকিং সুইচের জন্য অনুমতি দেয় (ডিফল্ট 10 মিটার)।
- 30m এ ট্র্যাকিং
- 20m এ ট্র্যাকিং
- 10m এ ট্র্যাকিং

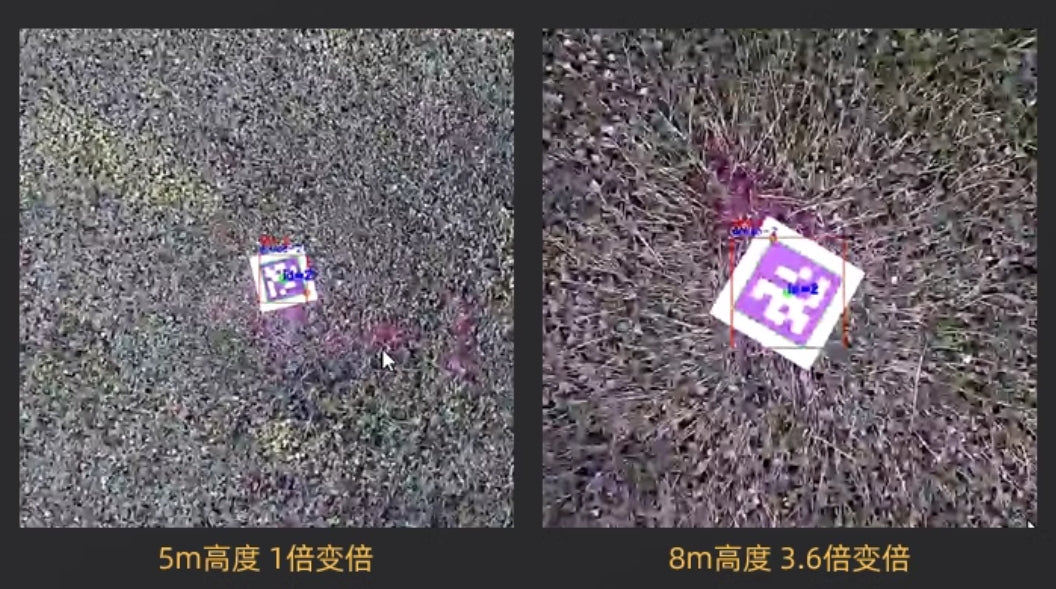
QR কোড গাইডেড ল্যান্ডিং
ব্যবহার করে SpireCV ভিশন লাইব্রেরি, QR কোডগুলির সুনির্দিষ্ট সনাক্তকরণ এবং অবস্থান অনুমান করা হয়। GX40 বিভিন্ন উচ্চতা থেকে QR কোডে নির্ভুল-নির্দেশিত অবতরণ করতে পারে। জিম্বাল ক্যামেরার কেন্দ্রটি 30 সেমি ত্রুটির মার্জিনের মধ্যে QR কোডের কেন্দ্রের সাথে সারিবদ্ধ হয়।
- 5মি উচ্চতা, 1x জুম
- 8m উচ্চতা, 3.6x জুম
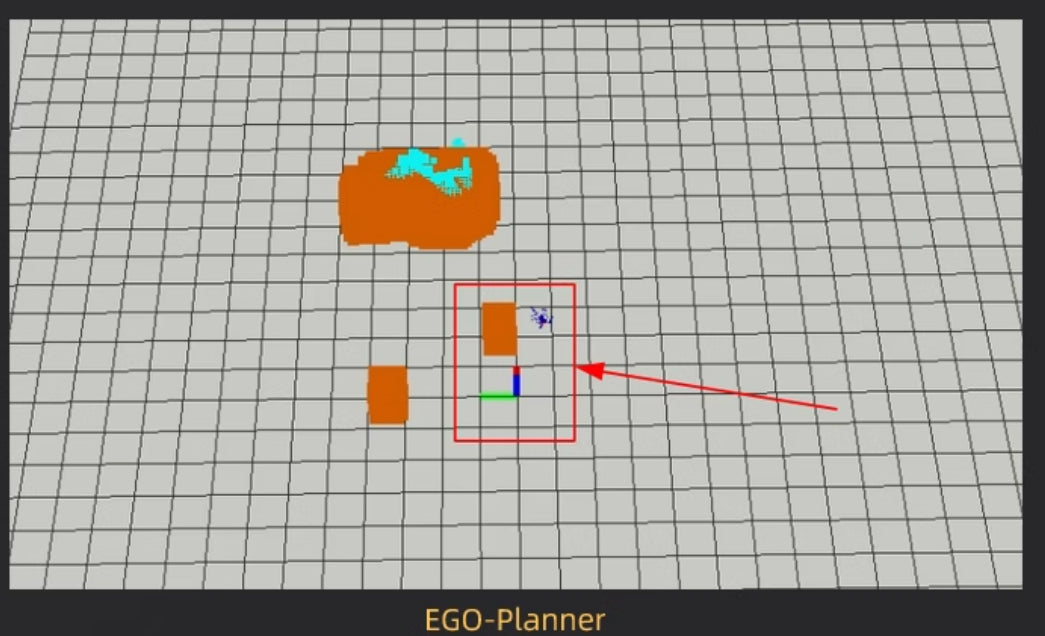
ইজিও-প্লানার
সমর্থন করে ইজিও-প্লানার পাথ প্ল্যানিং অ্যালগরিদম এবং প্রদান করে অক্টোম্যাপ ম্যাপিং অ্যালগরিদম. পেশাদার গ্রাউন্ড স্টেশনের সাথে মিলিত, এটি স্বায়ত্তশাসিত 3D গতিশীল পথ পরিকল্পনা সক্ষম করে।
স্থিতিশীল এবং নির্ভরযোগ্য ড্রোন নিয়ন্ত্রণ অ্যাপ্লিকেশন
P600 ড্রোনটি উচ্চ-নির্ভুলতা RTK সরঞ্জাম দিয়ে সজ্জিত, 1 সেমি পর্যন্ত অনুভূমিক নির্ভুলতা এবং 1.5 সেমি পর্যন্ত উল্লম্ব নির্ভুলতা সহ বাইরে ঘোরাফেরা করা উচ্চ-নির্ভুলতা অর্জন করে। সঙ্গে মিলিত প্রমিথিউস সফটওয়্যার সিস্টেম কন্ট্রোল মডিউল, এটি সুনির্দিষ্ট ড্রোন নিয়ন্ত্রণ সক্ষম করে।
ড্রোন কন্ট্রোল মডিউলটি সফ্টওয়্যার প্রোগ্রাম এবং ড্রোনের মধ্যে একটি "সেতু" হিসাবে কাজ করে, প্রাথমিক অবস্থানে ঘোরাঘুরি, বর্তমান অবস্থান ঘোরাফেরা, অবতরণ এবং চলাচলের মতো একাধিক নিয়ন্ত্রণ অবস্থা প্রদান করে। এর মধ্যে রয়েছে ছয়টি নিয়ন্ত্রণ মোড: অভ্যাসগত সিস্টেমের অবস্থান, গতি, অবস্থান এবং গতির সমন্বিত নিয়ন্ত্রণ এবং ট্র্যাজেক্টরি নিয়ন্ত্রণ মোড। মোট, এটি সাতটি নিয়ন্ত্রণ মোড অফার করে।

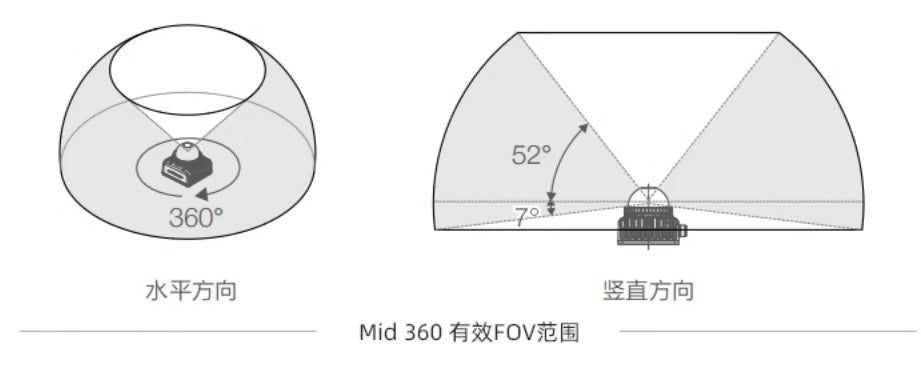
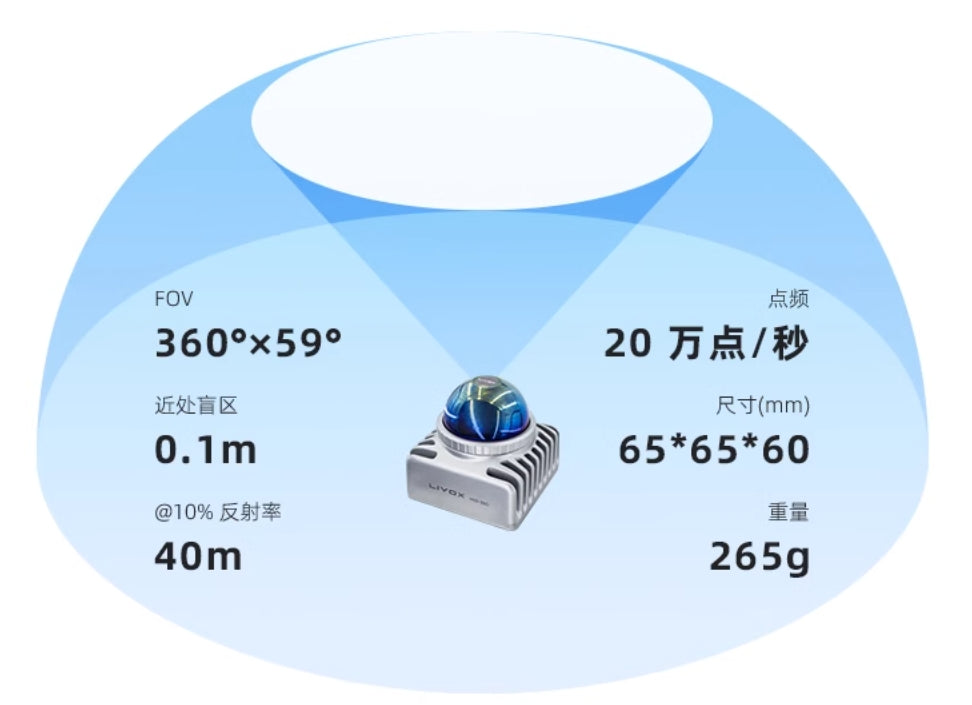
3D LiDAR মিড-360
- নিম্ন অন্ধ অঞ্চল | দর্শনের প্রশস্ত ক্ষেত্র | মাল্টি-সিনারিও অ্যাপ্লিকেশন
দ মাঝামাঝি-360 বৈশিষ্ট্য a 360° অনুভূমিক FOV এবং ক সর্বোচ্চ উল্লম্ব FOV 59°. লক্ষ্য বস্তুর প্রতিফলন 10% হলে, সর্বাধিক সনাক্তকরণ পরিসীমা পৌঁছাতে পারে 40 মিটার, এবং অন্ধ অঞ্চলের পরিসর যতটা ছোট 10 মিটার. এটি কম আলো এবং শক্তিশালী আলোর মতো বিভিন্ন জটিল পরিবেশের সাথে খাপ খায়।
মিড-360 মডিউল দিয়ে সজ্জিত, P600 ড্রোন অন্ধ অঞ্চলের প্যানোরামিক কভারেজ অর্জন করে, বহু-দৃশ্যক পরিবেশ জুড়ে ড্রোনগুলির জন্য নিরবচ্ছিন্ন অপারেশন নিশ্চিত করে।
- ডায়াগ্রাম বর্ণনা:
- অনুভূমিক দিক: 360°
- উল্লম্ব দিক: 52° সর্বোচ্চ FOV

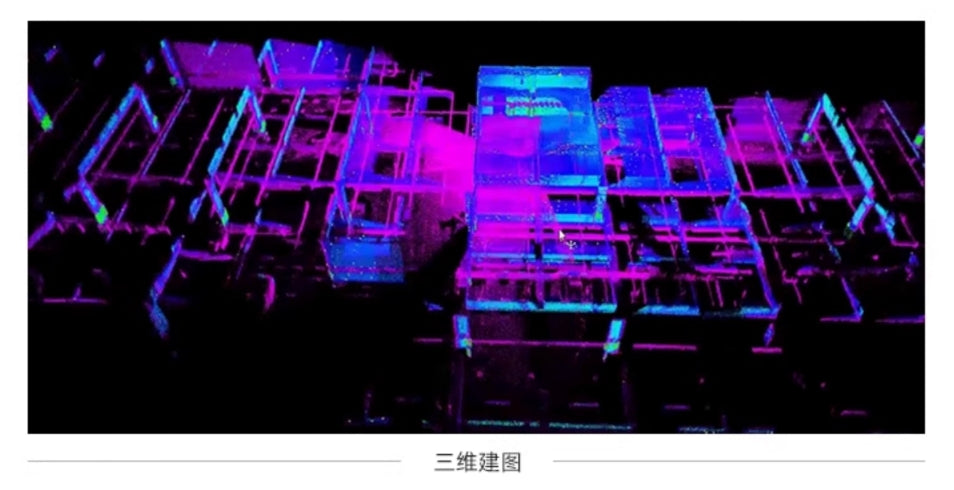
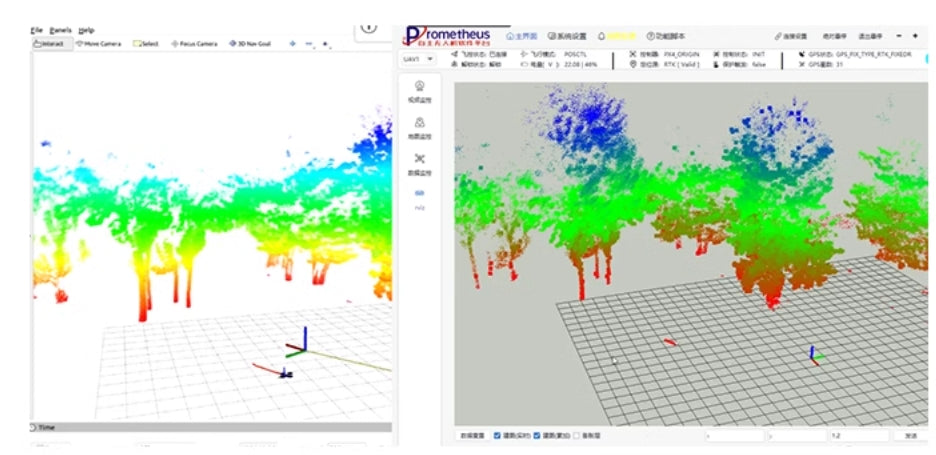
দ্রুত এবং সঠিক 3D এনভায়রনমেন্টাল ম্যাপিং
দ P600 ড্রোন উন্নত পরিবেশগত সংবেদন ক্ষমতা দিয়ে সজ্জিত, এটি ফ্লাইটের সময় আশেপাশের পরিবেশগত ডেটা দ্রুত সংগ্রহ করতে দেয়। এই তথ্যটি একটি উৎপন্ন করার জন্য রিয়েল-টাইমে প্রক্রিয়া করা হয় 3D পরিবেশগত মানচিত্র, বিভিন্ন কাজের জন্য সুনির্দিষ্ট স্থানিক সচেতনতা এবং নেভিগেশন সহায়তা প্রদান করে।
নেভিগেশন এবং বাধা এড়ানোর জন্য ইজিও-সোয়ার্ম পাথ পরিকল্পনা
দ মাঝামাঝি ৩৬০ এর সাথে মিলিত পয়েন্ট ক্লাউড ডেটা এবং অবস্থান ডেটা প্রকাশ করে ইজিও-সোয়ার্ম পাথ প্ল্যানিং অ্যালগরিদম, উল্লেখযোগ্যভাবে গতিশীল পরিবেশগত পরিবর্তনের সাথে স্বায়ত্তশাসিতভাবে মানিয়ে নিতে ড্রোনের ক্ষমতা বৃদ্ধি করে। এটি আন্দোলনের সময় বাধাগুলিকে রিয়েল-টাইমে বিশ্লেষণ এবং প্রতিক্রিয়া জানাতে পারে এবং গতিশীলভাবে সর্বাধিক গতির সাথে ট্র্যাকিং লক্ষ্য সামঞ্জস্য করতে পারে। 2 m/s. এটি অজানা এবং জটিল অপারেশনাল পরিস্থিতিতে ব্যতিক্রমী নমনীয়তা এবং অভিযোজনযোগ্যতা নিশ্চিত করে।
এই বৈশিষ্ট্যটি ড্রোনের কার্য দক্ষতাকে ব্যাপকভাবে উন্নত করে, এটিকে দক্ষতার সাথে এবং সঠিকভাবে বিভিন্ন কাজ সম্পূর্ণ করতে সক্ষম করে।
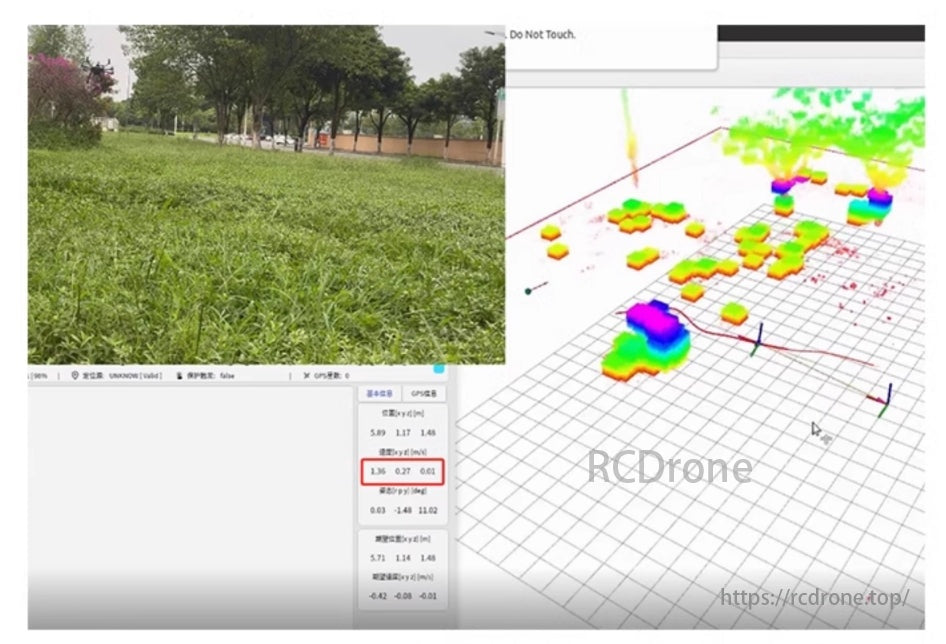
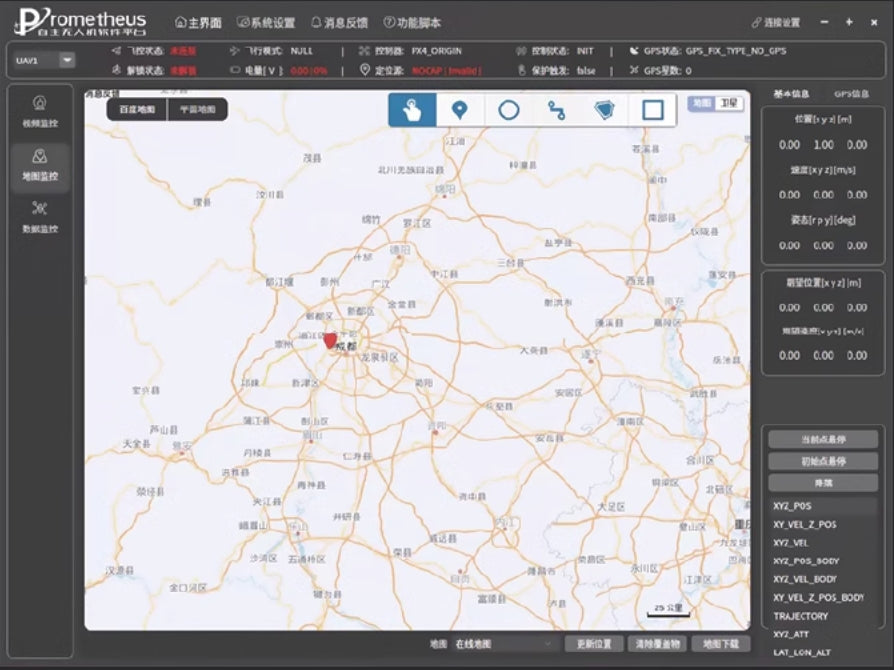
প্রমিথিউস প্রফেশনাল গ্রাউন্ড স্টেশন ড্রোন ইন্টারঅ্যাকশন
- গ্রাউন্ড স্টেশন ইন্টারঅ্যাকশন
এটি এর ইন্টারফেস এবং মিথস্ক্রিয়া ক্ষমতা প্রদর্শন করে প্রমিথিউস পেশাদার গ্রাউন্ড স্টেশন, 3D এনভায়রনমেন্টাল ম্যাপিং এর মাধ্যমে ড্রোনের সাথে নির্বিঘ্ন যোগাযোগ এবং অপারেশন সক্ষম করে।
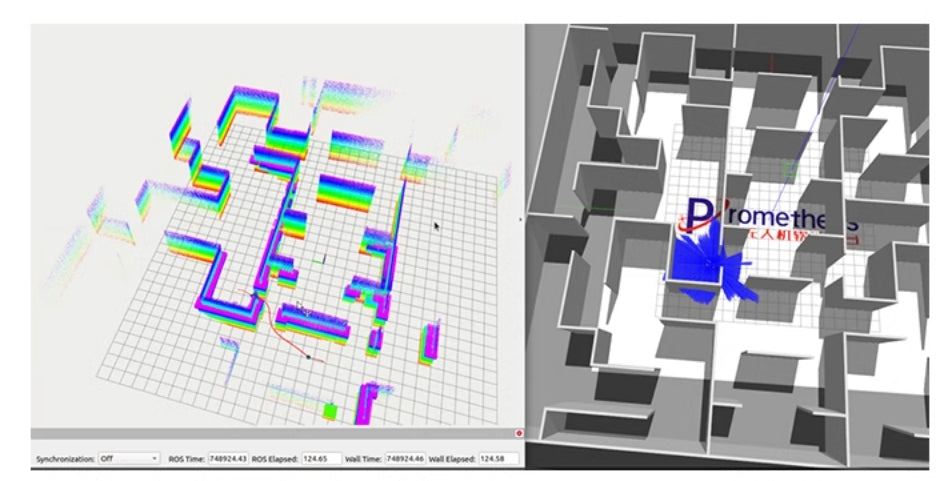
ইন্টিগ্রেটেড সিমুলেশন ফাংশন ডেমো
- সিমুলেটেড 3D LiDAR SLAM এবং EGO-Swarm Path Planning
এটি এর সিমুলেশন চিত্রিত করে 3D LiDAR SLAM এবং ইজিও-সোয়ার্ম পাথ পরিকল্পনা একটি কাঠামোগত পরিবেশের মধ্যে, একটি নিয়ন্ত্রিত ডেমোতে সিস্টেমের ক্ষমতা প্রদর্শন করে।
হার্ডওয়্যার বৈশিষ্ট্য
ড্রোন ফ্রেম
দ কেডওয়ে ডিপি1000 শিল্প-গ্রেড ড্রোন প্ল্যাটফর্ম একটি ব্যবহার করে FOC (ক্ষেত্র-ভিত্তিক নিয়ন্ত্রণ) পাওয়ার সিস্টেম, কম শব্দ, উচ্চ দক্ষতা এবং দ্রুত গতিশীল প্রতিক্রিয়া সহ মোটরকে স্থিরভাবে ঘোরাতে সক্ষম করে। পুরো ড্রোন সিস্টেমটি চমৎকার হার্ডওয়্যার গুণমান সহ একটি "উড়তে প্রস্তুত" অবস্থা অর্জন করে, যা স্থিতিশীল ফ্লাইট কর্মক্ষমতা নিশ্চিত করে। এটা সমর্থন করে অতি-দীর্ঘ সহনশীলতা (কোন পেলোড ছাড়াই 70 মিনিট), যখন P600 ড্রোন প্রায় প্রয়োজন স্থিতিশীলতার জন্য 24 মিনিট অবস্থানের সময়।

শক্তিশালী কম্পিউটিং ইউনিট
- অলস্পার্ক মাইক্রো এজ কম্পিউটিং ইউনিট, সঙ্গে সজ্জিত NVIDIA Orin NX মডিউল, প্রদান 100 টপস ফ্লোটিং-পয়েন্ট কম্পিউটিং পাওয়ার.
- কমপ্যাক্ট আকার, লাইটওয়েট, শক্তিশালী সিস্টেম সামঞ্জস্য, এবং GPU-ত্বরিত উচ্চ-কর্মক্ষমতা কম্পিউটিং.
- সমস্ত উন্নয়ন পরিবেশের সাথে প্রাক-ইনস্টল করা, ব্যবহারের জন্য প্রস্তুত, গৌণ উন্নয়ন দক্ষতা বৃদ্ধি করে।
- মাত্রা: 102.5 মিমি × 62।5 মিমি × 31 মিমি

ইন্টিগ্রেটেড ইমেজ ট্রান্সমিশন কন্ট্রোলার
আ শিল্প-গ্রেড ড্রোন রিমোট কন্ট্রোলার ডেটা, ইমেজ এবং কন্ট্রোল একত্রিত করা।
- ফ্রিকোয়েন্সি ব্যান্ড: 2.4-2.483 GHz
- সর্বোচ্চ ট্রান্সমিশন দূরত্ব: 30 কিমি
- ছবির গুণমান: 1080P
- ব্যাটারি লাইফ: একটানা অপারেশন 8-15 ঘন্টা
ড্রোন অপারেশন চলাকালীন, ব্যবহারকারীরা রিয়েল-টাইম ড্রোন তথ্য নিরীক্ষণ করতে পারে, ক্যামেরার ফুটেজ দেখতে পারে এবং একই সাথে জয়স্টিক দিয়ে ড্রোন নিয়ন্ত্রণ করতে পারে, সম্পূর্ণরূপে দৃশ্যমান ফ্লাইট অপারেশন নিশ্চিত করে।

ডুয়াল-অ্যান্টেনা উচ্চ-নির্ভুল RTK
ড্রোনটি একটি দিয়ে সজ্জিত RTK-GNSS পজিশনিং মডিউল, যা ড্রোনের জন্য সেন্টিমিটার-স্তরের অবস্থান নির্ভুলতা প্রদান করতে দ্রুত ক্যারিয়ার-ফেজ ডিফারেনশিয়াল পজিশনিং প্রযুক্তি এবং মাল্টিপাথ সাপ্রেশন অ্যালগরিদম ব্যবহার করে। এটি একই সাথে একাধিক গ্রাউন্ড-ভিত্তিক রেফারেন্স স্টেশন থেকে RTCM ডেটা গ্রহণ করতে পারে, স্বল্প, মাঝারি এবং দীর্ঘ বেসলাইন RTK গণনা সমর্থন করে।
একটি বিল্ট-ইন মাল্টি-ভাষা সহ ওয়েব GUI, এটি শূন্য-থ্রেশহোল্ড কনফিগারেশন এবং ভিজ্যুয়ালাইজড ডেটা প্রদর্শন এবং আপগ্রেড প্রক্রিয়া সক্ষম করে। রিসিভারটিতে একটি ব্যবহারকারী-বান্ধব ওয়েবপেজ কনফিগারেশন ইন্টারফেসও রয়েছে, যা কার্যকরী বাধাকে উল্লেখযোগ্যভাবে কমিয়ে দেয়। এটি সমৃদ্ধ ইন্টারফেস অফার করে এবং বিভিন্ন অ্যাপ্লিকেশন পরিস্থিতিতে অভিযোজিত, সুনির্দিষ্ট অবস্থানে ব্যতিক্রমী কর্মক্ষমতা প্রদান করে।

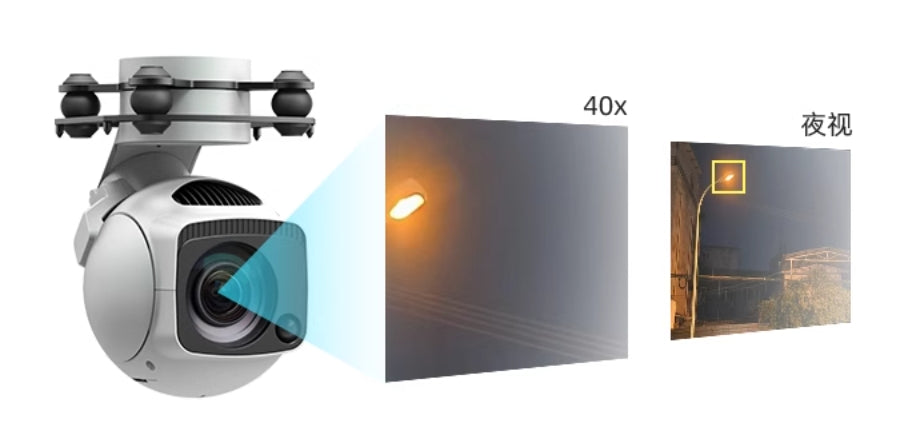
40x অপটিক্যাল-ইলেক্ট্রনিক জিম্বাল
একটি উচ্চ-নির্ভুলতা 3-অক্ষ নন-অর্থোগোনাল জিম্বাল দিয়ে সজ্জিত, এতে একটি 8.29-মেগাপিক্সেল 10x অপটিক্যাল জুম ক্যামেরা রয়েছে যা ডিজিটাল জুম প্রযুক্তির সাথে মিলিত হয়েছে, যা 40x পর্যন্ত বিবর্ধন অর্জন করে। এটি আউটপুট করতে পারে 4K@30FPS video নেটওয়ার্কে প্রবাহিত হয়। উপরন্তু, এটি একটি লেজার আলোকসজ্জা মডিউল দিয়ে সজ্জিত, এমনকি সম্পূর্ণ অন্ধকার পরিবেশেও পরিষ্কার ছবিগুলিকে সক্ষম করে৷
MID 360 3D LiDAR
মিড-360 হল একটি সাশ্রয়ী, নিরাপদ, এবং নির্ভরযোগ্য লেজার সনাক্তকরণ এবং রেঞ্জিং সেন্সর। এটি লজিস্টিক রোবট, ইন্ডাস্ট্রিয়াল রোবট এবং স্মার্ট সিটির মতো ক্ষেত্রগুলিতে ব্যাপকভাবে ব্যবহৃত হয়, ম্যাপিং, পজিশনিং, শনাক্তকরণ এবং বাধা এড়ানোর মতো সহায়ক ফাংশনগুলি। মিড-360 0.1 মিটারের কাছাকাছি এবং 100 মিটার পর্যন্ত বস্তু সনাক্ত করতে পারে। এতে কমপ্যাক্ট সাইজ, প্রশস্ত দৃশ্যের ক্ষেত্র, উচ্চ রেজোলিউশন, উচ্চ নির্ভরযোগ্যতা এবং একটি সমন্বিত IMU বৈশিষ্ট্য রয়েছে।
স্পেসিফিকেশন:
- FOV: 360° × 59°
- ন্যূনতম সনাক্তকরণ দূরত্ব: 0.1 মি
- পরিসর (@10% প্রতিফলন): 40 মি
- পয়েন্ট ফ্রিকোয়েন্সি: 200,000 পয়েন্ট/সেকেন্ড
- মাত্রা (মিমি): 65 × 65 × 60
- ওজন: 265 গ্রাম
সফ্টওয়্যার বৈশিষ্ট্য
Prometheus V2 সফটওয়্যার সিস্টেম
ডেভেলপমেন্ট প্ল্যাটফর্মটি ROS এবং প্রমিথিউস ওপেন-সোর্স ফ্রেমওয়ার্কের উপর ভিত্তি করে, দক্ষ কাস্টমাইজেশনের জন্য সমৃদ্ধ কার্যকারিতা এবং বিপুল সংখ্যক সেকেন্ডারি ডেভেলপমেন্ট ইন্টারফেস অফার করে। এটি অবস্থানের তথ্য, ফ্লাইট মোড, ব্যাটারির স্থিতি এবং IMU সহ UAV অবস্থা এবং সেন্সর ডেটার জন্য ইন্টারফেস সরবরাহ করে। উপরন্তু, এটি অবস্থান, গতি, ত্বরণ এবং মনোভাবের জন্য নিয়ন্ত্রণ ইন্টারফেস প্রদান করে, সেইসাথে উন্নয়ন ইন্টারফেস ব্যবহারের জন্য উদাহরণ প্রোগ্রাম। UAV-তে অন্তর্নির্মিত ফ্লাইট নিরাপত্তা পরিদর্শন ফাংশনও রয়েছে (বাধা এড়ানো নয়), ক্র্যাশ ঝুঁকি কমাতে অস্বাভাবিক পরিস্থিতিতে স্বয়ংক্রিয় অবতরণ সক্ষম করে, উন্নয়নকে আরও নিরাপদ করে।

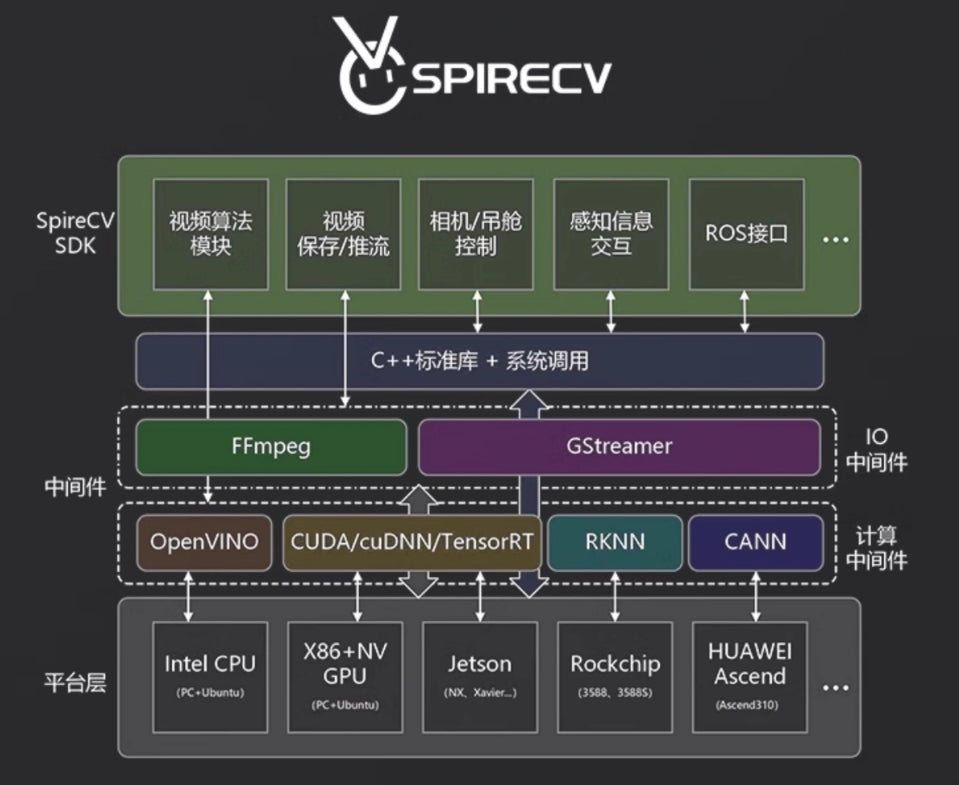
SpireCV ভিশন লাইব্রেরি
SpireCV ভিশন লাইব্রেরির উপর ভিত্তি করে, এটি একটি অনবোর্ড ইমেজ রিয়েল-টাইম প্রসেসিং SDK যা বিশেষভাবে বুদ্ধিমান মানবহীন সিস্টেমের জন্য ডিজাইন করা হয়েছে। এর প্রধান বৈশিষ্ট্যগুলির মধ্যে রয়েছে জিম্বাল/ক্যামেরা নিয়ন্ত্রণ, ভিডিও স্টোরেজ, স্ট্রিমিং, লক্ষ্য সনাক্তকরণ, স্বীকৃতি এবং ট্র্যাকিং। এটির লক্ষ্য উচ্চ-কর্মক্ষমতা, অত্যন্ত নির্ভরযোগ্য, সহজ এবং বৈশিষ্ট্য সমৃদ্ধ দৃষ্টি প্রক্রিয়াকরণ ক্ষমতা সহ বুদ্ধিমান মানবহীন সিস্টেমের বিকাশকারীদের প্রদান করা। এই মডেলটি পয়েন্ট-এন্ড-ক্লিক যানবাহন ট্র্যাকিং কার্যকারিতার জন্য YOLO প্রশিক্ষণ সমর্থন করে।
প্রমিথিউস গ্রাউন্ড স্টেশন সিস্টেম
প্রমিথিউস গ্রাউন্ড স্টেশন হল একটি মানব-মেশিন ইন্টারফেস যা প্রমিথিউস সিস্টেমের উপর ভিত্তি করে Qt ব্যবহার করে তৈরি করা হয়েছে। এটি মাল্টি-মেশিন যোগাযোগের কনফিগারেশন সহজ করার জন্য TCP/UDP যোগাযোগ ব্যবহার করে। গ্রাউন্ড স্টেশন ব্যবহারকারীদের দ্রুত প্রমিথিউস সিস্টেমের বিভিন্ন ফাংশন প্রতিলিপি করতে সক্ষম করে, ইউএভি স্ট্যাটাসের রিয়েল-টাইম নিরীক্ষণের পাশাপাশি এক-ক্লিক টেকঅফ, ল্যান্ডিং এবং পজিশন কন্ট্রোল কমান্ড অপারেশনের মতো বৈশিষ্ট্যগুলি প্রদান করে।
অ্যাপ্লিকেশন
-
বৈজ্ঞানিক গবেষণা এবং এআই উন্নয়ন
- এআই অ্যালগরিদম পরীক্ষা
- উন্নত সেন্সর ডেটা বিশ্লেষণ
- রিয়েল-টাইম ইমেজ প্রসেসিং এবং ট্র্যাকিং
-
শিল্প অ্যাপ্লিকেশন
- জটিল পরিবেশে যথার্থ ম্যাপিং এবং নেভিগেশন
- সরবরাহ এবং গুদামজাতকরণে বাধা সনাক্তকরণ এবং এড়ানো
- বিদ্যুৎ লাইন এবং পাইপলাইনের মতো অবকাঠামো পরিদর্শন
-
একাডেমিক এবং শিক্ষাগত ব্যবহার
- ROS-ভিত্তিক AI গবেষণার জন্য সেকেন্ডারি প্রোগ্রামিং
- পরীক্ষাগার প্রদর্শন এবং পরীক্ষা
- স্বায়ত্তশাসিত ড্রোন নেভিগেশন প্রশিক্ষণ
-
স্মার্ট সিটি সলিউশন
- নগর পরিকল্পনার জন্য 3D স্থানিক পুনর্গঠন
- ট্রাফিক মনিটরিং এবং ব্যবস্থাপনা
- নজরদারি এবং পরিবেশগত বিশ্লেষণ
-
কাস্টম উন্নয়ন
- বিশেষ শিল্প অ্যাপ্লিকেশনের জন্য প্রোটোটাইপিং
- নতুন হার্ডওয়্যার এবং সফ্টওয়্যার উপাদানগুলির পরীক্ষা এবং একীকরণ
-
দুর্যোগ প্রতিক্রিয়া এবং পরিবেশগত পর্যবেক্ষণ
- দুর্যোগ-কবলিত এলাকায় বায়বীয় পরিদর্শন ও পর্যবেক্ষণ
- গবেষণা এবং নীতি নির্ধারণের জন্য পরিবেশগত তথ্য সংগ্রহ
P600 অতুলনীয় নমনীয়তা এবং কার্যকারিতা প্রদান করে, যা গবেষক, প্রকৌশলী এবং বিকাশকারীদের বিভিন্ন পরিস্থিতিতে জটিল প্রকল্পগুলি সম্পাদন করতে সক্ষম করে।
Related Collections







