







P600 Drone Wissenschaftliche Forschungsdrohne – ROS AI Experimentelle Sekundärprogrammierung Industrielle Entwicklungsplattform Studio Lab Drone DIY Kit
P600 Drone Wissenschaftliche Forschungsdrohne – ROS AI Experimentelle Sekundärprogrammierung Industrielle Entwicklungsplattform Studio Lab Drone DIY Kit
RCDrone
Verfügbarkeit für Abholungen konnte nicht geladen werden
Überblick
Der P600 Wissenschaftliche Forschungsdrohne ist eine hochmoderne Plattform für wissenschaftliche Forschung, industrielle Entwicklung und KI-Experimente. Ausgestattet mit einem leistungsstarken NVIDIA Jetson Orin NX-Rechnermodul, es liefert 100 TOPS Rechenleistung, was sie ideal für fortgeschrittene KI-Anwendungen macht. Diese Drohne verfügt über eine 40-facher optischer Zoom Gimbal-Kamera für hochauflösende Bildgebung, 3D-LiDAR-SLAM für eine präzise Kartierung und RTK-Positionierung für zentimetergenaue Genauigkeit. Seine integrierte Prometheus V2 Software Und SpireCV-Vision-Bibliothek unterstützen sekundäre Programmierung und sind somit ein vielseitiges Werkzeug für Entwickler. Mit einer Flugzeit von bis zu 21 Minuten, A 600 mm Diagonalachseund eine robuste 4,05 kg AbfluggewichtDer P600 ist für dynamische Forschungs- und Entwicklungsumgebungen optimiert.
Technische Daten
Flugzeug
| Attribut | Details |
|---|---|
| Flugzeugtyp | Quadrocopter |
| Abfluggewicht | Ca. 4,05 kg (inkl. Batterie) |
| Diagonaler Achsenabstand | 600 mm |
| Maße | Länge 469 mm, Breite 469 mm, Höhe 400 mm |
| Maximale Schwebezeit | Ca. 21 Min. |
| Schwebegenauigkeit | RTK: ±0,015 m (horizontal), ±0,01 m (vertikal) 3D-LiDAR-SLAM: ±0,2 m (horizontal), ±0,1 m (vertikal) |
| Betriebstemperatur | 6°C ~ 40°C |
| Haupt-MCU-Chip | STM32H743VIT6 / 216 MHz / 2M Programmspeicher / 512 KB Datenspeicher |
| IMU | ICM20689 |
| Barometer | BMP388 |
| MTD | AT24C64 |
| I/O-Schnittstellen | Eingebauter PX4IO-V2, unterstützt 8PWM-Schnittstellen, 1RC-Schnittstelle (unterstützt SBus, PPM, DSM) Externe Schnittstellen: 3UART (GH1.25 6-polig), 1CAN (GH1.25 4-polig), USB-Schnittstelle zur Flugsteuerung (Typ C) |
Bordcomputer
| Attribut | Details |
|---|---|
| Name | Allspark-Orin NX Bordcomputer |
| Modell | IA160_V1 |
| Gewicht | Ca. 188 g |
| Maße | 102,5 mm × 62,5 mm × 31 mm (inkl. Lüfter) |
| Prozessor | NVIDIA Jetson Orin NX |
| Erinnerung | 16 GB LPDDR5 |
| Rechenleistung | 100 TOPS |
| Grafikkarte | Integrierte 32 Tensor-Kerne einer 1024-Core NVIDIA Ampere-Architektur-GPU |
| CPU | 8-Core Arm® Cortex®-A78AE v8.2 64-Bit-CPU (2 MB L2 + 4 MB L3) |
| SSD | 128 GB (M.2 Schnittstellen, erweiterbar) |
| Ethernet | 100 Mbit/s x2 (1 dedizierter Ethernet-Port, 1 austauschbar) |
| W-lan | 5G |
| Anzeige | Micro-HDMI (1920 x 1080P) |
| USB-Anschlüsse | USB 2.0: Typ A x1, Typ C x1 USB 2.0: OTG x1 |
| Stromversorgung | 10–26 V bei 3 A |
Akku
| Attribut | Details |
|---|---|
| Modell | LPB610HV |
| Kapazität | 10000 mAh |
| Batteriegewicht | 1,2 kg |
| Betriebsspannung | 22 V bis 26,1 V |
| Speicherspannung | 23,1 V |
| Maße | Länge 180 mm, Breite 90 mm, Höhe 63 mm |
Fernbedienung
| Attribut | Details |
|---|---|
| Modell | H16 |
| Kanäle | 16 |
| Frequenz | 2,400–2,483 GHz |
| Betriebsspannung | 4,2 V |
| Batterie | 20000 mAh |
| Ladeanschluss | Typ C 9V-2A |
| Gewicht | 1034 g |
| Maße | Länge 272 mm, Breite 183 mm, Höhe 94 mm |
Kommunikationslink
| Attribut | Details |
|---|---|
| Modell | R16 |
| Kommunikationsentfernung | Ca. 600 Meter, Bandbreite 3,5 Mbit/s |
| Betriebsspannung | 7,2 V bis 72 V |
| Schnittstellen | 2UART, 1Ethernet, 1HDMI, 1Typ C |
| Maße | Länge 76 mm, Breite 69 mm, Höhe 11 mm |
Gimbal-Kamera
| Attribut | Details |
|---|---|
| Modell | GX40 |
| Gimbal-Abmessungen | Länge 85,8 mm, Breite 86 mm, Höhe 129,3 mm |
| GCU-Abmessungen | Länge 45,4 mm, Breite 40 mm, Höhe 13,5 mm |
| Gewicht des Gimbals | 405 g |
| GCU-Gewicht | 18,6 g |
| Betriebsspannung | 14 V bis 53 V |
| Streaming-Protokoll | RTSP (Standard) |
| Kodierungsformat | H.264 / H.264H / H.264B / H.265 / MJPEG |
| Auflösung | 4K30fps - 1080P@30fps - SCGA (12801024)@30fps <br> – 1.3M (1280960)@30fps - 720P@30fps |
| Bitrate | 0,25 Mbit/s bis 10 Mbit/s bei H.265, 0,5 Mbit/s bis 16 Mbit/s bei H.264 |
Linse
| Attribut | Details |
|---|---|
| Typ | Optisches Zoomobjektiv |
| Brennweite | 4,8~48 mm |
| Blende (F/NO) | f1,7~f3,2 |
| Diagonales Sichtfeld (D) | 67,2°~7,6° |
| Vertikales Sichtfeld (V) | 36,1°~3,7° |
| Horizontales Sichtfeld (H) | 60,2°~6,6° |
| Optisches Zoomverhältnis | 10x |
Bildsensor
| Attribut | Details |
|---|---|
| Sensortyp | CMOS |
| Effektive Pixel | 8,29 Mio. |
| Sensorgröße | 1/2,8 Zoll |
| Pixelgröße | 1,45 × 1,45 (μm) |
| Elektronische Verschlussgeschwindigkeit | 1 bis 1/30.000 s |
Illuminator
| Attribut | Details |
|---|---|
| Typ | Laser |
| Wellenlänge | 850±10 nm |
| Leistung | 0,8 W |
| Beleuchtungsabstand | ≤200 m |
RTK
| Attribut | Details |
|---|---|
| Modell | M15-RTK |
| Gewicht | 90 g |
| Maße | Länge 80 mm, Breite 50 mm, Höhe 20 mm |
| Unterstützte Satellitentypen | BDS/GPS/GLONASS/QZSS |
| Stromversorgung | 9–36 V (12 V empfohlen) |
| Antennenanschluss | SMA-F |
| Funktionale Anschlüsse | UARTx2, CANx1, USB2.0x1 |
Ladegerät
| Attribut | Details |
|---|---|
| Modell | C1-XR |
| AC-Eingangsspannung | 100 bis 240 V |
| DC-Eingangsspannung | 11 bis 18 V |
| Maße | Länge 130 mm, Breite 115 mm, Höhe 61 mm |
| Gewicht | 380 g |
| Ladestrom | 0.1 bis 10 A |
| Unterstützte Batteriezellen | 1~6 Zellen |
3D-LiDAR
| Attribut | Details |
|---|---|
| Modell | MID360 |
| Laserwellenlänge | 905 nm |
| Erfassungsbereich | 40 m (bei 105 % Reflektivität) |
| Sichtfeld (FOV) | Horizontal: 360°, Vertikal: -7°~52° |
| Mindestreichweite | 0,1 m |
| Punktwolkenrate | 10 Hz (typisch) |
| Punkte pro Sekunde | 200.000 Punkte/s |
| Datenschnittstelle | 100 BASE-TX Ethernet |
| Datensynchronisation | IEEE 1588-2008 (PTP v2), GPS |
| Interne IMU | ICM40609 |
| Stromversorgung | 7 bis 27 V |
| Maße | 65 mm (B) x 65 mm (T) x 60 mm (H) |
| Gewicht | 115 g |
| Betriebstemperatur | -20°C bis 55°C |
Softwareparameter
Bordcomputer
| Attribut | Details |
|---|---|
| Modell | Jetson Orin NX |
| Betriebssystem | Ubuntu 20.04 |
| Benutzername | amov |
| Passwort | amov |
| L4T Version | 35.2.1 |
| Jetpack-Version | 5.1 |
| CUDA Version | 11.4.315 |
| Realsense SDK | 2.50.0 |
| ROS-Version | noetisch |
| OpenCV-Version | 4.7.0 |
| Realsense ROS | 2.3.2 |
Paketliste
| Name | Spezifikation/Modell | Menge/Einheit |
|---|---|---|
| P600 Hauptflugzeug | P600-Allpark2-RTK-GX40-S3 | 1 Satz |
| M15-RTK-Bodenanschluss | M15-RTK | 1 Stück |
| GNSS Pilzantenne | Pilzantenne | 1 Stück |
| GNSS-Antennen-Verlängerungskabel | Antennen-Verlängerungskabel | 1 Kabel |
| H16 Fernbedienung | H16 | 1 Einheit |
| 6S 10000mAh Power-Akku | 6S 10000mAh | 1 Satz |
| 3S 4000mAh Lithiumbatterie | Akku 3S 4000mAh | 1 Satz |
| Smart Balancing Ladegerät | C1-XR | 1 Einheit |
| Netzwerkkabel | 1,5 m | 1 Kabel |
| Sicherungsseil | 50 m | 1 Paket |
| HDMI-Halterung | / | 1 Stück |
| HDMI-Adapterkabel | / | 1 Stück |
| Computerkonfiguration | / | 1 Stück |
| 2D-Fallplatte | 35×35 cm | 1 Stück |
| Luftfahrtkoffer | 740×540×510 mm | 1 Satz |
| Zubehör-Kabelpaket | / | 1 Paket |
| Zertifikat | / | 1 Blatt |
| Checkliste Funktionstest | / | 1 Blatt |
Details
Prometheus 600 – Entwicklungsplattform für wissenschaftliche Forschungsdrohnen
Der Prometheus 600 – Entwicklungsplattform für wissenschaftliche Forschungsdrohnen (P600) ist das Produkt der vierten Generation der P600-Serie. Es integriert zwei Kerntechnologien, Prometheus Und SpireCV, und ist mit einer kardanischen Kamera mit 40-fach optischem Zoom ausgestattet. Diese Konfiguration ermöglicht die Erkennung und Verfolgung von Zielen über große Entfernungen, autonome Landungen aus großer Höhe und Flugmissionen.
Das System unterstützt 3D LiDAR SLAM mit Fast-lio, wodurch hochpräzises 3D SLAM-Mapping erreicht wird. Darüber hinaus verfügt es über die EGO-Swarm Multi-Agenten-Kollaborationsalgorithmus, und ermöglicht Anwendungen in verschiedenen Szenarien wie 3D-Raumrekonstruktion im Innen- und Außenbereich und Hindernisvermeidung bei der Drohnennavigation.
Ergänzt werden diese erweiterten Funktionen durch die Professionelle Bodenstation Prometheus, das visuelles Feedback in Echtzeit, Betriebsüberwachung und dynamische Parameteranpassung bietet, sodass Entwickler die sekundäre Entwicklung einfacher meistern und beschleunigen können.

Drei Versionen der P600-Drohne

Flexible Steuerung des optisch-elektronischen Gimbals
Die GX40-Gimbal-Kamera unterstützt die Steuerung mehrerer Szenarien und verfügt über eine kettenbasierte Fernsteuerung, die die Zielsuche während der Wegpunktnavigation ermöglicht. Mit dem SpireCV-Vision-Bibliothek, erleichtert es die Erkennung und Verfolgung von Zielen und ermöglicht eine Echtzeit-Fixierung des Kardangelenks auf dem Ziel.
- Nachtbeleuchtung
- Zielerkennung und -verfolgung

Zielklick und Tracking
Mit dem YOLOv5-Erkennungsalgorithmus und durch Nutzung des universellen COCO-Datensatzes werden Ziele erkannt und verfolgt. Nanotrack-Tracking-Algorithmus erfasst ausgewählte Ziele zur Verfolgung. Ohne Änderungen der Bedingungen können Ziele in bis zu 30 Metern Entfernung identifiziert und verfolgt werden. Durch 40-facher optischer Zoom und elektronischer Zoom, Zielerkennung und -verfolgung über große Entfernungen werden erreicht. Bei der Drohnenverfolgung wird die Professionelle Bodenstation Prometheus ermöglicht dynamische, entfernungsbasierte Zielverfolgungsumschaltungen (Standard ist 10 Meter).
- Verfolgung auf 30 m
- Verfolgung auf 20 m
- Verfolgung auf 10 m

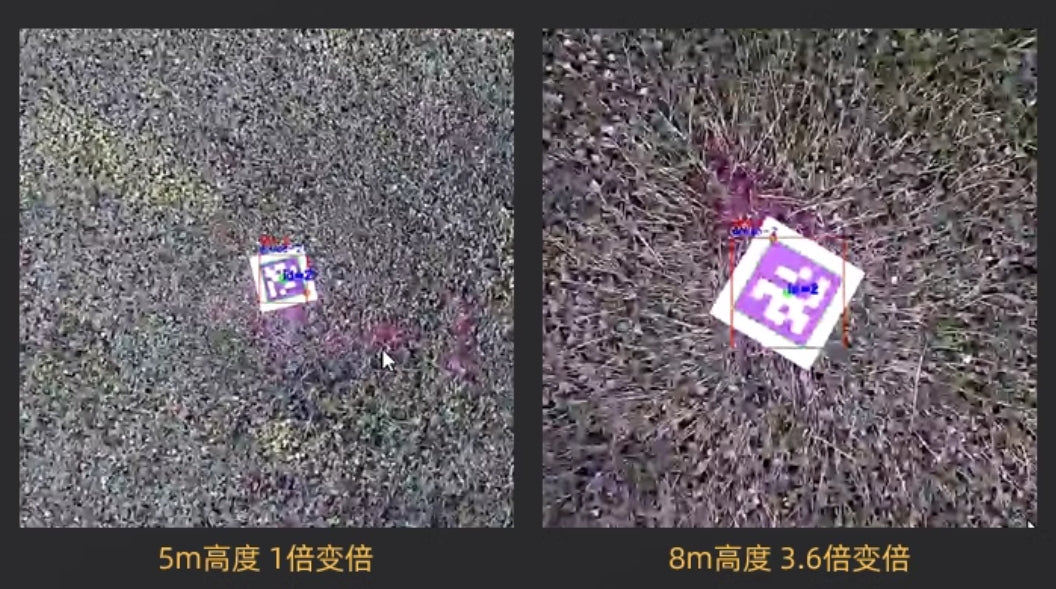
Geführte Landung mit QR-Code
Mit dem SpireCV-Vision-Bibliothek, wird eine präzise Erkennung und Positionsbestimmung von QR-Codes erreicht. Der GX40 kann aus verschiedenen Höhen präzise Landungen auf QR-Codes durchführen. Die Mitte der Gimbal-Kamera wird mit einer Fehlertoleranz von 30 cm auf die Mitte des QR-Codes ausgerichtet.
- 5 m Höhe, 1-facher Zoom
- 8 m Höhe, 3,6-facher Zoom
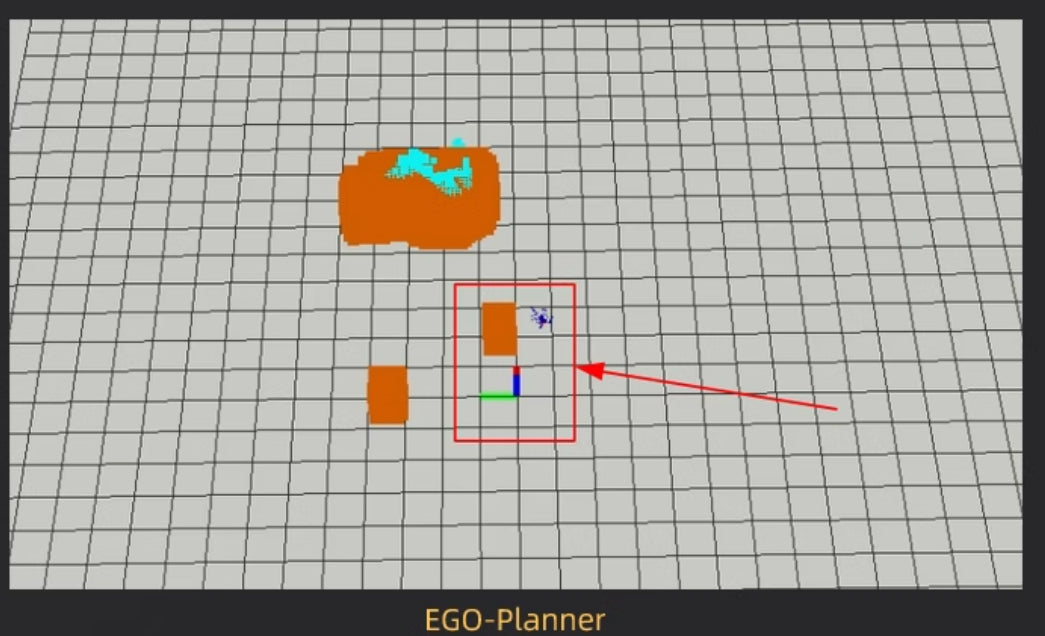
EGO-Planer
Unterstützt die EGO-Planner-Pfadplanungsalgorithmus und bietet Octomap-Mapping-AlgorithmusIn Kombination mit der professionellen Bodenstation ermöglicht es eine autonome dynamische 3D-Pfadplanung.
Stabile und zuverlässige Drohnensteuerungsanwendungen
Die P600-Drohne ist mit hochpräziser RTK-Ausrüstung ausgestattet und ermöglicht hochpräzises Schweben im Freien mit einer horizontalen Präzision von bis zu 1 cm und einer vertikalen Präzision von bis zu 1,5 cm. In Kombination mit der Prometheus Software-Systemsteuerungsmodul, ermöglicht es eine präzise Drohnensteuerung.
Das Drohnensteuermodul fungiert als „Brücke“ zwischen Softwareprogrammen und der Drohne und bietet mehrere Steuerzustände wie Schweben in der Ausgangsposition, Schweben in der aktuellen Position, Landung und Bewegung. Dazu gehören sechs Steuermodi: gewöhnliche Systemposition, Geschwindigkeit, integrierte Kontrolle von Position und Geschwindigkeit und Flugbahnkontrollmodus. Insgesamt bietet es sieben Steuermodi.

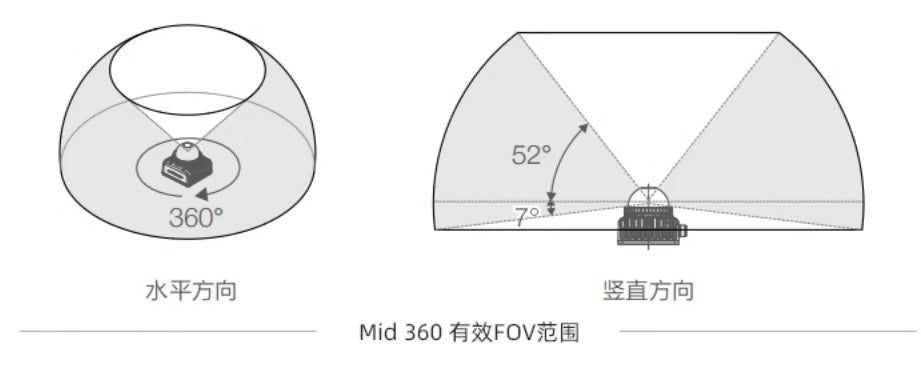
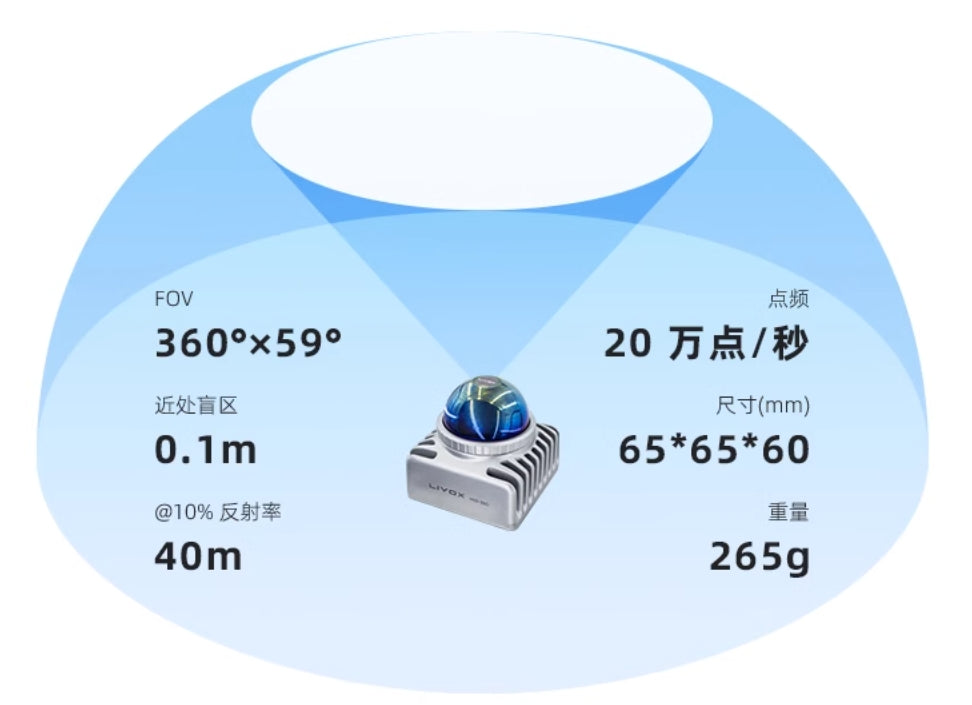
3D-LiDAR Mitte 360
- Geringe Blindzone | Weites Sichtfeld | Anwendung in mehreren Szenarien
Der Mitte 360 verfügt über eine 360° horizontales Sichtfeld und ein maximales vertikales Sichtfeld von 59°Wenn die Reflektivität des Zielobjekts 10 % beträgt, kann die maximale Erfassungsreichweite 40 Meterund der Bereich der toten Zone beträgt nur 10 Meter. Es passt sich an verschiedene komplexe Umgebungen wie schwaches und starkes Licht an.
Ausgestattet mit dem Mid-360-Modul, P600 Drohne erreicht eine Panoramaabdeckung des toten Winkels und gewährleistet so den reibungslosen Betrieb von Drohnen in Umgebungen mit mehreren Szenarien.
- Diagrammbeschreibungen:
- Horizontale Richtung: 360°
- Vertikale Richtung: 52° maximales Sichtfeld

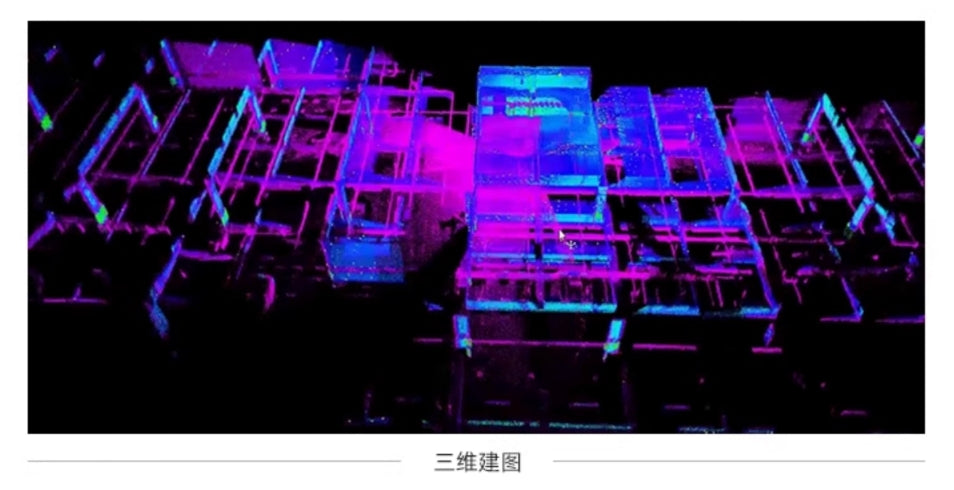
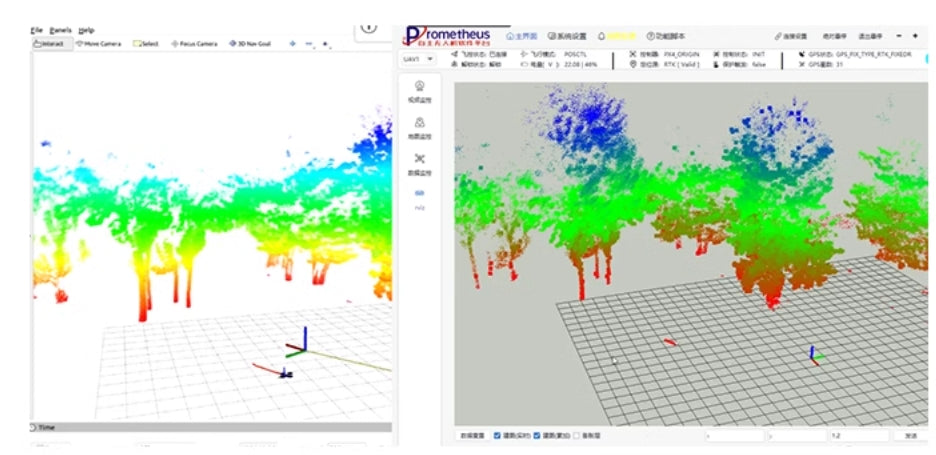
Schnelle und genaue 3D-Umweltkartierung
Der P600 Drohne ist mit fortschrittlichen Umgebungssensoren ausgestattet, die es ihm ermöglichen, während des Fluges schnell Umgebungsdaten zu erfassen. Diese Daten werden in Echtzeit verarbeitet, um ein 3D-Umgebungskarte, und bietet präzises räumliches Bewusstsein und Navigationsunterstützung für verschiedene Aufgaben.
EGO-Swarm-Pfadplanung zur Navigation und Hindernisvermeidung
Der Mitte 360 veröffentlicht Punktwolkendaten und Standortdaten, kombiniert mit der EGO-Swarm-Pfadplanungsalgorithmus, wodurch die Fähigkeit der Drohne, sich autonom an dynamische Umweltveränderungen anzupassen, erheblich verbessert wird. Sie kann Hindernisse während der Bewegung in Echtzeit analysieren und darauf reagieren und das Verfolgungsziel mit einer Höchstgeschwindigkeit von dynamisch anpassen 2 m/s. Dies gewährleistet außergewöhnliche Flexibilität und Anpassungsfähigkeit in unbekannten und komplexen Einsatzszenarien.
Diese Funktion verbessert die Arbeitseffizienz der Drohne erheblich und ermöglicht es ihr, eine Vielzahl von Aufgaben effizient und präzise auszuführen
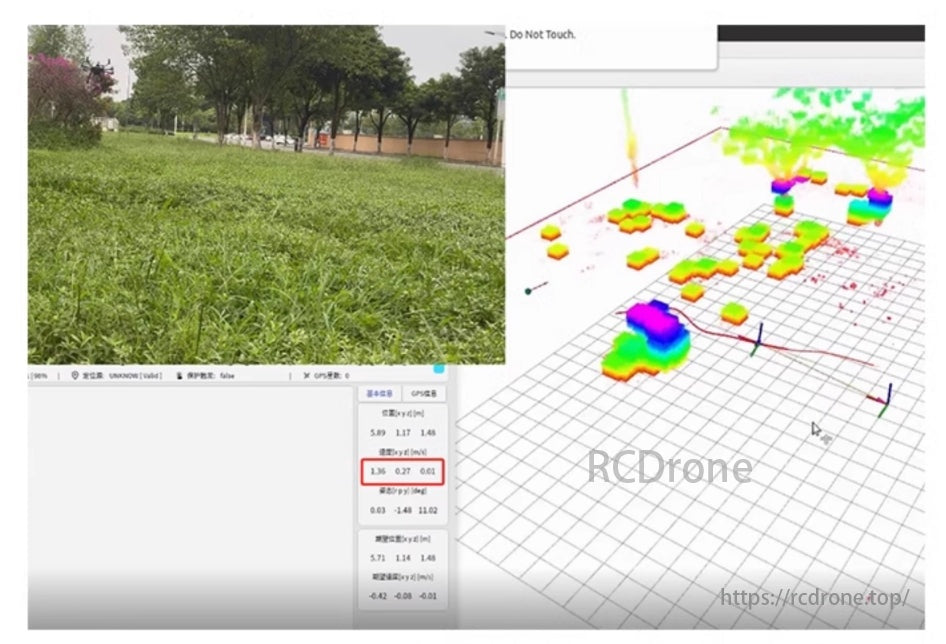
Prometheus Professionelle Bodenstation Drohneninteraktion
- Bodenstationsinteraktion
Dies zeigt die Schnittstelle und Interaktionsmöglichkeiten des Professionelle Bodenstation Prometheus, wodurch eine nahtlose Kommunikation und Bedienung mit der Drohne durch 3D-Umweltkartierung ermöglicht wird.
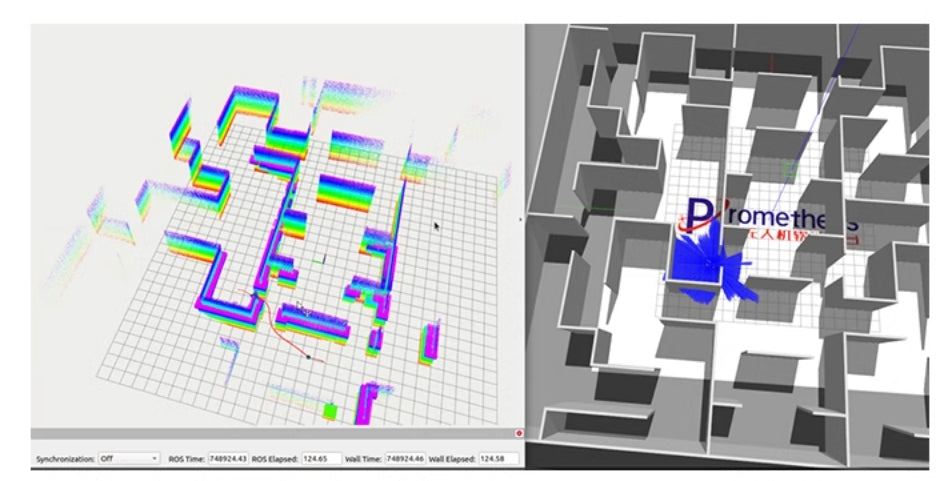
Demo der integrierten Simulationsfunktion
- Simulierter 3D-LiDAR-SLAM und EGO-Swarm-Pfadplanung
Dies veranschaulicht die Simulation von 3D-LiDAR-SLAM Und EGO-Schwarm-Pfadplanung in einer strukturierten Umgebung, wobei die Fähigkeiten des Systems in einer kontrollierten Demo vorgeführt werden.
Hardwarefunktionen
Drohnenrahmen
Der Kedway DP1000 Industrielle Drohnenplattform nutzt eine FOC (Feldorientierte Steuerung) Antriebssystem, das dem Motor eine stabile Drehung mit geringem Geräusch, hoher Effizienz und schneller dynamischer Reaktion ermöglicht. Das gesamte Drohnensystem erreicht einen „flugbereiten“ Zustand mit hervorragender Hardwarequalität und gewährleistet eine stabile Flugleistung. Es unterstützt ultralange Ausdauer (70 Minuten ohne Nutzlast), während die P600 Drohne benötigt ca. 24 Minuten zur Stabilisierung während der Positionierung.

Leistungsstarke Recheneinheit
- Allspark Micro Edge-Rechnereinheit, ausgestattet mit dem NVIDIA Orin NX-Modulund bietet 100 TOPS Gleitkomma-Rechenleistung.
- Kompakte Größe, geringes Gewicht, hohe Systemkompatibilität und GPU-beschleunigtes Hochleistungsrechnen.
- Alle Entwicklungsumgebungen sind vorinstalliert und sofort einsatzbereit. Dies steigert die Effizienz der sekundären Entwicklung.
- Maße: 102,5 mm × 62.5 mm x 31 mm

Integrierter Bildübertragungscontroller
Ein Drohnen-Fernbedienung in Industriequalität Daten, Bilder und Steuerung in einem kombinieren.
- Frequenzband: 2,4 bis 2,483 GHz
- Maximale Übertragungsdistanz: 30 km
- Bildqualität: 1080P
- Akkulaufzeit: 8-15 Stunden Dauerbetrieb
Während des Drohnenbetriebs können Benutzer Drohneninformationen in Echtzeit überwachen, Kameraaufnahmen ansehen und die Drohne gleichzeitig mit dem Joystick steuern, wodurch ein vollständig visualisierter Flugbetrieb gewährleistet wird.

Hochpräzises RTK mit Doppelantenne
Die Drohne ist ausgestattet mit einem RTK-GNSS-Positionierungsmodul, das eine schnelle Trägerphasendifferenz-Positionierungstechnologie und Algorithmen zur Unterdrückung von Mehrwegeausbreitung nutzt, um Drohnen eine zentimetergenaue Positionierungsgenauigkeit zu bieten. Es kann gleichzeitig RTCM-Daten von mehreren bodengestützten Referenzstationen empfangen und unterstützt RTK-Berechnungen für kurze, mittlere und lange Basislinien.
Mit einer integrierten mehrsprachigen Web-Benutzeroberfläche, ermöglicht es eine unkomplizierte Konfiguration sowie visualisierte Datenanzeige- und Upgrade-Prozesse. Der Receiver verfügt außerdem über eine benutzerfreundliche Webseiten-Konfigurationsschnittstelle, die die Bedienbarriere deutlich senkt. Er bietet umfangreiche Schnittstellen und ist an verschiedene Anwendungsszenarien anpassbar, wodurch er eine außergewöhnliche Leistung bei der präzisen Positionierung liefert.

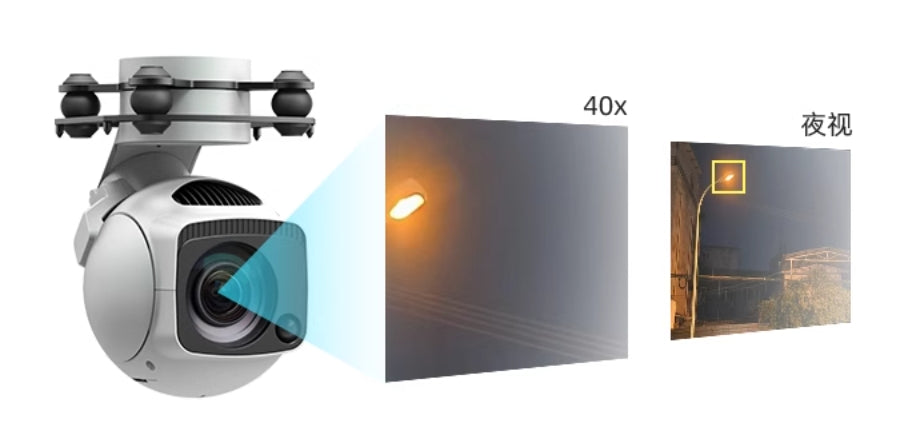
40x Optisch-elektronisches Gimbal
Ausgestattet mit einem hochpräzisen 3-Achsen-nichtorthogonalen Gimbal verfügt es über eine 8,29-Megapixel-Kamera mit 10-fach optischem Zoom in Kombination mit digitaler Zoom-Technologie, die eine bis zu 40-fache Vergrößerung erreicht. Es kann 4K@30FPS video-Streams über das Netzwerk. Darüber hinaus ist es mit einem Laserbeleuchtungsmodul ausgestattet, das selbst in völlig dunklen Umgebungen klare Bilder ermöglicht.
MID 360 3D LiDAR
Der Mid-360 ist ein kostengünstiger, sicherer und zuverlässiger Lasererkennungs- und Entfernungssensor. Er wird häufig in Bereichen wie Logistikrobotern, Industrierobotern und Smart Cities eingesetzt und unterstützt Funktionen wie Kartierung, Positionierung, Identifizierung und Hindernisvermeidung. Der Mid-360 kann Objekte in einer Entfernung von 0,1 Metern und bis zu 100 Metern erkennen. Er zeichnet sich durch kompakte Größe, ein weites Sichtfeld, hohe Auflösung, hohe Zuverlässigkeit und eine integrierte IMU aus.
Technische Daten:
- Sichtfeld: 360° × 59°
- Minimale Erkennungsentfernung: 0,1 m
- Reichweite (bei 10 % Reflektivität): 40 m
- Punktfrequenz: 200.000 Punkte/Sekunde
- Größe (mm): 65 × 65 × 60
- Gewicht: 265 g
Softwarefunktionen
Prometheus V2 Softwaresystem
Die Entwicklungsplattform basiert auf ROS und dem Open-Source-Framework Prometheus und bietet umfangreiche Funktionen und eine große Anzahl sekundärer Entwicklungsschnittstellen für eine effiziente Anpassung. Sie bietet Schnittstellen für UAV-Zustand und Sensordaten, einschließlich Standortinformationen, Flugmodi, Batteriestatus und IMU. Darüber hinaus bietet sie Steuerschnittstellen für Position, Geschwindigkeit, Beschleunigung und Fluglage sowie Beispielprogramme für die Verwendung der Entwicklungsschnittstelle. Das UAV verfügt außerdem über integrierte Flugsicherheitsprüfungsfunktionen (keine Hindernisvermeidung), die eine automatische Landung in ungewöhnlichen Situationen ermöglichen, um das Absturzrisiko zu verringern und die Entwicklung sicherer zu machen.

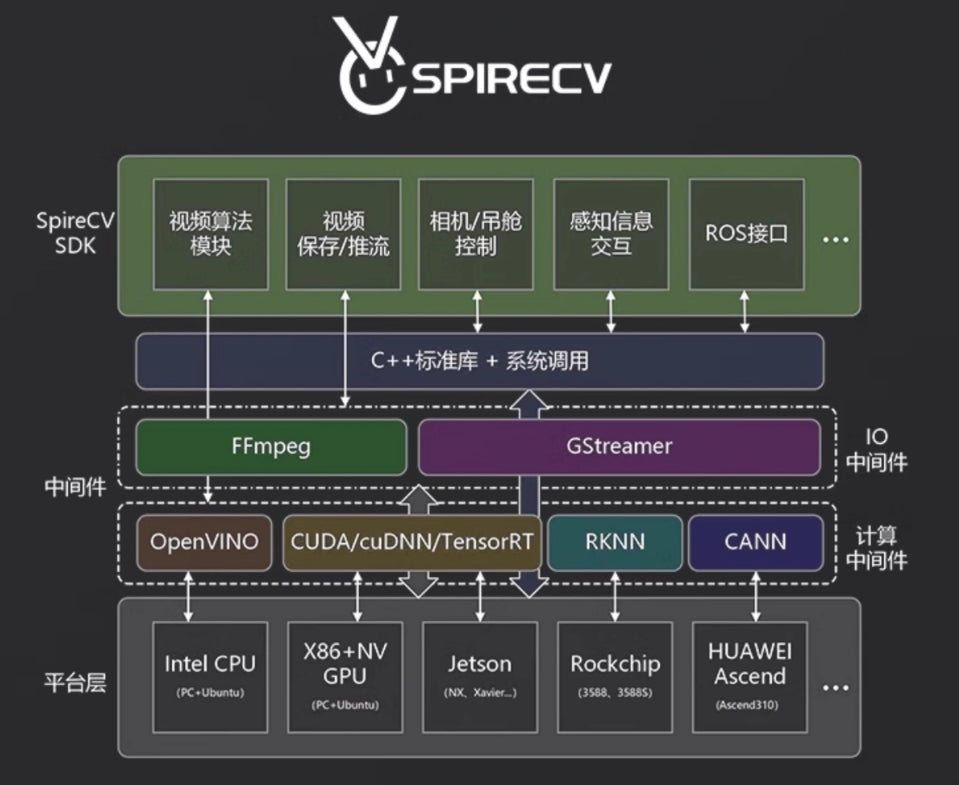
SpireCV Vision-Bibliothek
Basierend auf der SpireCV-Bildverarbeitungsbibliothek handelt es sich hierbei um ein integriertes SDK zur Echtzeitbildverarbeitung, das speziell für intelligente unbemannte Systeme entwickelt wurde. Zu seinen Hauptfunktionen gehören Kardan-/Kamerasteuerung, Videospeicherung, Streaming, Zielerkennung, -erkennung und -verfolgung. Es zielt darauf ab, Entwicklern intelligenter unbemannter Systeme leistungsstarke, äußerst zuverlässige, einfache und funktionsreiche Bildverarbeitungsfunktionen bereitzustellen. Dieses Modell unterstützt das YOLO-Training für die Point-and-Click-Fahrzeugverfolgungsfunktion.
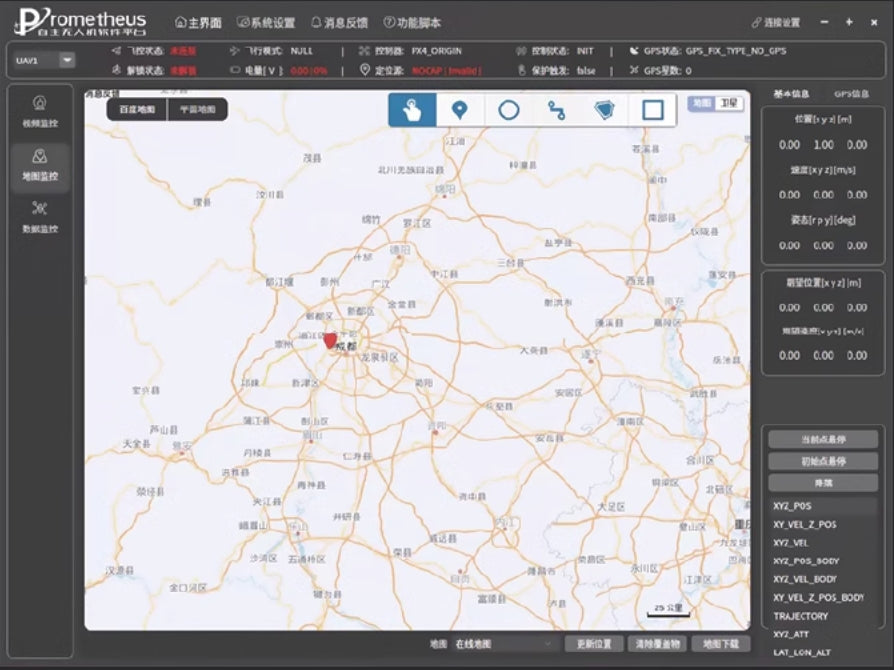
Prometheus-Bodenstationssystem
Die Prometheus-Bodenstation ist eine Mensch-Maschine-Schnittstelle, die mit Qt entwickelt wurde und auf dem Prometheus-System basiert. Sie verwendet TCP/UDP-Kommunikation, um die Konfiguration der Kommunikation zwischen mehreren Maschinen zu vereinfachen. Die Bodenstation ermöglicht es Benutzern, verschiedene Funktionen des Prometheus-Systems schnell zu replizieren und bietet eine Echtzeitüberwachung des UAV-Status sowie Funktionen wie Start-, Lande- und Positionssteuerungsbefehle mit nur einem Klick.
Anwendungen
-
Wissenschaftliche Forschung und KI-Entwicklung
- Testen von KI-Algorithmen
- Erweiterte Sensordatenanalyse
- Bildverarbeitung und Tracking in Echtzeit
-
Industrielle Anwendungen
- Präzise Kartierung und Navigation in komplexen Umgebungen
- Hinderniserkennung und -vermeidung in Logistik und Lagerhaltung
- Inspektion von Infrastruktur wie Stromleitungen und Pipelines
-
Akademische und pädagogische Verwendung
- Sekundärprogrammierung für ROS-basierte KI-Forschung
- Labordemonstrationen und Experimente
- Training zur autonomen Drohnennavigation
-
Smart City-Lösungen
- 3D-Raumrekonstruktion für die Stadtplanung
- Verkehrsüberwachung und -management
- Überwachung und Umweltanalyse
-
Kundenspezifische Entwicklung
- Prototyping für spezialisierte Industrieanwendungen
- Testen und Integrieren neuer Hard- und Softwarekomponenten
-
Katastrophenhilfe und Umweltüberwachung
- Inspektion und Überwachung aus der Luft in Katastrophengebieten
- Erhebung von Umweltdaten für Forschung und Politikgestaltung
Der P600 bietet beispiellose Flexibilität und Funktionalität und ermöglicht es Forschern, Ingenieuren und Entwicklern, komplexe Projekte in unterschiedlichsten Szenarien durchzuführen.
Related Collections







