-
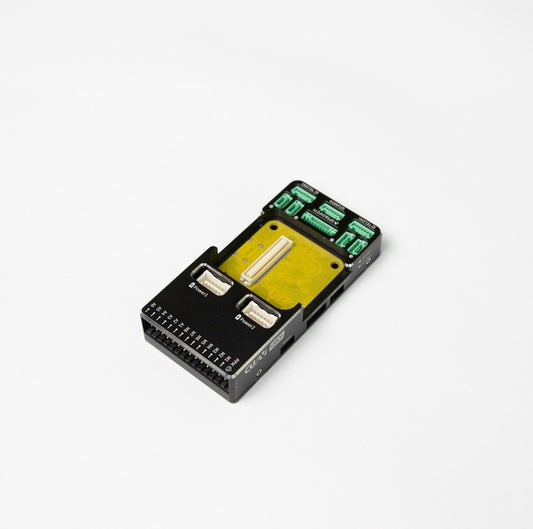
CUAV V5+ Placa portadora Piloto automático Pixhawk Controlador de vuelo - FPV RC Drone Quadcopter Helicóptero VTOL
Precio habitual $192.64 USDPrecio habitualPrecio unitario por -
CUAV NUEVO controlador de vuelo con piloto automático V5+, basado en FMU V5, hardware de código abierto para FPV RC Drone Quadcopter Helicóptero Pixhawk
Precio habitual A partir de $554.59 USDPrecio habitualPrecio unitario por -
CUAV V5+/X7+ Placa Base Controlador de Vuelo, Pixhawk FMU v5, STM32F765, PX4/ArduPilot
Precio habitual A partir de $208.60 USDPrecio habitualPrecio unitario por -
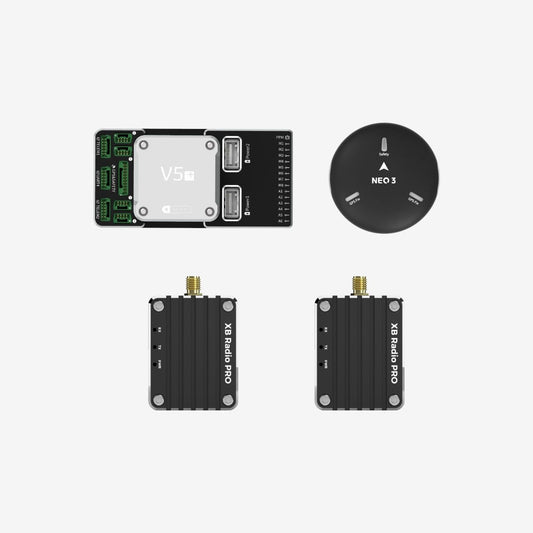
Paquete de helicóptero multirotor CUAV New Match: controlador de vuelo con piloto automático V5+ NEO 3 GPS y juego de telemetría XBEE Pro
Precio habitual $1,066.02 USDPrecio habitualPrecio unitario por -
CUAV P9 Radio Datos y Pixhawk Drone Fpv V5+ Controlador de vuelo NEO 3 Pro GPS Telemetría Combo
Precio habitual $1,645.35 USDPrecio habitualPrecio unitario por -
CUAV nuevo paquete de una a varias estrellas con V5+ Flight Flightcase RTK 9Ps GPS y kit combinado de radiotelemetría P900
Precio habitual $5,056.40 USDPrecio habitualPrecio unitario por -

CUAV nuevo uno a múltiple con V5 + controlador de vuelo RTK 9Ps GPS P9 Radio telemetría GNSS Kit Set
Precio habitual $3,832.45 USDPrecio habitualPrecio unitario por -
CUAV Pixhawk Drone Fpv V5+ Controlador de vuelo NEO 3 Pro GPS y tubo de velocidad aerodinámica Módulo SKYE Combo
Precio habitual $1,105.22 USDPrecio habitualPrecio unitario por -
CUAV NUEVO Pixhack Pixhawk V5+ Piloto automático - FPV RC Drone Quadcopter Helicóptero Controlador de vuelo y NEO V2 3 Pro GPS Combo
Precio habitual A partir de $616.54 USDPrecio habitualPrecio unitario por -
CUAV VTOL Rc Drone Pixhawk Autopilot V5+ Paquete de placa portadora central con NEO 3 GPS y combo de telemetría P9
Precio habitual $1,869.14 USDPrecio habitualPrecio unitario por -
CUAV Pixhawk Drone Fpv V5+ Controlador de vuelo NEO 3 Pro GPS y módulo CAN Power PMU Combo
Precio habitual $1,057.20 USDPrecio habitualPrecio unitario por -
CUAV CAN PDB Placa portadora de piloto automático V5+ Plus Core - RC Drone Pixhawk Controlador de vuelo
Precio habitual $826.81 USDPrecio habitualPrecio unitario por -
CUAV nuevo Drone UAV FPV V5 + piloto automático Pixhawk controlador de vuelo con módulo Lidar de Radar TF Luna
Precio habitual $657.82 USDPrecio habitualPrecio unitario por -
CUAV NUEVO V5 + Diseño de hardware Pixhack Pixhawk Piloto automático Vuelo Control remoto FPV RC Drone Quadcopter Helicóptero Transporte
Precio habitual $408.00 USDPrecio habitualPrecio unitario por