







P600 Drone Investigación Científica Drone - ROS AI Programación Secundaria Experimental Plataforma de Desarrollo Industrial Studio Lab Drone Kit de Bricolaje
P600 Drone Investigación Científica Drone - ROS AI Programación Secundaria Experimental Plataforma de Desarrollo Industrial Studio Lab Drone Kit de Bricolaje
RCDrone
No se pudo cargar la disponibilidad de retiro
Descripción general
El Drone de investigación científica P600 es una plataforma de vanguardia diseñada para la investigación científica, el desarrollo industrial y la experimentación con IA. Equipada con un procesador de alto rendimiento Módulo informático NVIDIA Jetson Orin NX, lo entrega 100 TOPS de potencia informática, lo que lo hace ideal para aplicaciones de IA avanzadas. Este dron cuenta con un Zoom óptico de 40x cámara con cardán para imágenes de alta resolución, GOLPE DE LIDAR 3D para un mapeo preciso, y Posicionamiento RTK para una precisión de nivel centimétrico. software Prometheus V2 integrado y Biblioteca de visión SpireCV Admite programación secundaria, lo que lo convierte en una herramienta versátil para desarrolladores. Con un tiempo de vuelo de hasta 21 minutos, a Eje diagonal de 600 mm, y un robusto 4,05 kg de peso al despegueEl P600 está optimizado para entornos dinámicos de investigación y desarrollo.
Presupuesto
Aeronave
| Atributo | Detalles |
|---|---|
| Tipo de aeronave | Cuadricóptero |
| Peso de despegue | Aprox. 4,05 kg (incluida la batería) |
| Distancia del eje diagonal | 600 milímetros |
| Dimensiones | Largo 469 mm, Ancho 469 mm, Alto 400 mm |
| Tiempo máximo de vuelo estacionario | Aprox. 21 min |
| Precisión al volar | RTK: ±0,015 m (horizontal), ±0,01 m (vertical) SLAM LiDAR 3D: ±0,2 m (horizontal), ±0,1 m (vertical) |
| Temperatura de funcionamiento | 6°C ~ 40°C |
| Chip MCU principal | STM32H743VIT6 / 216 MHz / 2 M de almacenamiento de programa / 512 KB de almacenamiento de datos |
| Unidad de medida intramuscular (IMU) | ICM20689 |
| Barómetro | BMP388 |
| DMT | AT24C64 |
| Interfaces de E/S | PX4IO-V2 incorporado, admite 8Interfaces PWM, 1Interfaz RC (compatible con SBus, PPM, DSM) Interfaces externas: 3UART (GH1.25 de 6 pines), 1Interfaz USB de control de vuelo CAN (GH1.25 de 4 pines) (tipo C) |
Computadora de a bordo
| Atributo | Detalles |
|---|---|
| Nombre | Computadora de a bordo Allspark-Orin NX |
| Modelo | IA160_V1 |
| Peso | Aprox. 188 g |
| Dimensiones | 102,5 mm × 62,5 mm × 31 mm (incluido el ventilador) |
| Procesador | NVIDIA Jetson Orin NX |
| Memoria | 16 GB LPDDR5 |
| Poder de cómputo | 100 TOPS |
| GPU | GPU con arquitectura NVIDIA Ampere de 1024 núcleos y 32 núcleos Tensor integrados |
| UPC | CPU Arm® Cortex®-A78AE v8.2 de 64 bits y 8 núcleos (2 MB L2 + 4 MB L3) |
| Unidad de estado sólido | 128 GB (M.2 interfaces, ampliables) |
| Ethernet | 100 Mbps x2 (1 puerto Ethernet dedicado, 1 intercambiable) |
| Wi-Fi | 5G |
| Mostrar | Micro HDMI (1920 x 1080p) |
| Puertos USB | USB 2.0: Tipo A x1, Tipo C x1 USB 2.0: OTG x1 |
| Fuente de alimentación | 10 ~ 26 V a 3 A |
Batería de potencia
| Atributo | Detalles |
|---|---|
| Modelo | LPB610HV |
| Capacidad | 10000 mAh |
| Peso de la batería | 1,2 kilos |
| Voltaje de funcionamiento | 22 V ~ 26,1 V |
| Voltaje de almacenamiento | 23,1 V |
| Dimensiones | Largo 180 mm, Ancho 90 mm, Alto 63 mm |
Control remoto
| Atributo | Detalles |
|---|---|
| Modelo | H16 |
| Canales | 16 |
| Frecuencia | 2,400 ~ 2,483 GHz |
| Voltaje de funcionamiento | 4,2 V |
| Batería | 20000 mAh |
| Puerto de carga | Tipo C 9 V-2 A |
| Peso | 1034 gramos |
| Dimensiones | Largo 272 mm, Ancho 183 mm, Alto 94 mm |
Enlace de comunicación
| Atributo | Detalles |
|---|---|
| Modelo | R16 |
| Distancia de comunicación | Aproximadamente 600 metros, ancho de banda 3,5 Mbps |
| Voltaje de funcionamiento | 7,2 V ~ 72 V |
| Interfaces | 2Unidad de control unidireccional, 1Ethernet, 1HDMI, 1Tipo C |
| Dimensiones | Largo 76 mm, Ancho 69 mm, Alto 11 mm |
Cámara con cardán
| Atributo | Detalles |
|---|---|
| Modelo | GX40 |
| Dimensiones del cardán | Largo 85,8 mm, Ancho 86 mm, Alto 129,3 mm |
| Dimensiones de la UCG | Largo 45,4 mm, Ancho 40 mm, Alto 13,5 mm |
| Peso del cardán | 405 gramos |
| Peso de la UCG | 18,6 gramos |
| Voltaje de funcionamiento | 14 V ~ 53 V |
| Protocolo de transmisión | RTSP (predeterminado) |
| Formato de codificación | H.264 / H.264H / H.264B / H.265 / MJPEG |
| Resolución | - 4K30 fps - 1080P@30fps - CGSA (12801024) a 30 fps <br> - 1.3M (1280960) a 30 fps - 720P@30fps |
| Tasa de bits | 0,[email protected], 0,[email protected] |
Lente
| Atributo | Detalles |
|---|---|
| Tipo | Lente con zoom óptico |
| Longitud focal | 4,8 ~ 48 mm |
| Apertura (F/NO) | f1.7 ~ f3.2 |
| Campo de visión diagonal (D) | 67,2°~7,6° |
| Campo de visión vertical (V) | 36,1°~3,7° |
| Campo de visión horizontal (H) | 60,2°~6,6° |
| Relación de zoom óptico | 10x |
Sensor de imagen
| Atributo | Detalles |
|---|---|
| Tipo de sensor | CMOS |
| Píxeles efectivos | 8,29 millones |
| Tamaño del sensor | 1/2,8'' |
| Tamaño de píxel | 1,45 × 1,45 (μm) |
| Velocidad de obturación electrónica | 1~1/30000 s |
Iluminador
| Atributo | Detalles |
|---|---|
| Tipo | Láser |
| Longitud de onda | 850 ± 10 nm |
| Fuerza | 0,8 W |
| Distancia de iluminación | ≤200 m |
RTK
| Atributo | Detalles |
|---|---|
| Modelo | M15-RTK |
| Peso | 90 gramos |
| Dimensiones | Largo 80 mm, Ancho 50 mm, Alto 20 mm |
| Tipos de satélites compatibles | Sistema de posicionamiento global (BDS)/GPS/GLONASS/QZSS |
| Fuente de alimentación | 9~36 V (se recomiendan 12 V) |
| Conector de antena | SMA-F |
| Puertos funcionales | UARTx2, CANx1, USB2.0x1 |
Cargador
| Atributo | Detalles |
|---|---|
| Modelo | C1-XR |
| Voltaje de entrada de CA | 100 ~ 240 V |
| Voltaje de entrada de CC | 11 ~ 18 V |
| Dimensiones | Largo 130 mm, Ancho 115 mm, Alto 61 mm |
| Peso | 380 gramos |
| Corriente de carga | 0.1A ~ 10A |
| Celdas de batería compatibles | 1~6 celdas |
LiDAR 3D
| Atributo | Detalles |
|---|---|
| Modelo | MID360 |
| Longitud de onda del láser | 905 nm |
| Rango de detección | 40 m (con una reflectividad del 105 %) |
| Campo de visión (FOV) | Horizontal: 360°, Vertical: -7°~52° |
| Rango mínimo | 0,1 m |
| Tasa de nube de puntos | 10 Hz (típico) |
| Puntos por segundo | 200.000 puntos por segundo |
| Interfaz de datos | Ethernet 100BASE-TX |
| Sincronización de datos | IEEE 1588-2008 (PTP v2), GPS |
| IMU interna | ICM40609 |
| Fuente de alimentación | 7 ~ 27 V |
| Dimensiones | 65 mm (ancho) x 65 mm (profundidad) x 60 mm (alto) |
| Peso | 115 gramos |
| Temperatura de funcionamiento | -20°C ~ 55°C |
Parámetros del software
Computadora de a bordo
| Atributo | Detalles |
|---|---|
| Modelo | Jetson Orin NX |
| Sistema operativo | Ubuntu 20.04 |
| Nombre de usuario | amov |
| Contraseña | amov |
| Versión L4T | 35.2.1 |
| Versión Jetpack | 5.1 |
| Versión CUDA | 11.4.315 |
| SDK de Realsense | 2.50.0 |
| Versión ROS | noético |
| Versión de OpenCV | 4.7.0 |
| ROS de RealSense | 2.3.2 |
Lista de paquetes
| Nombre | Especificación/modelo | Cantidad/Unidad |
|---|---|---|
| Avión principal P600 | P600-Allpark2-RTK-GX40-S3 | 1 juego |
| Terminal de tierra M15-RTK | M15-RTK | 1 pieza |
| Antena tipo hongo GNSS | Antena de hongo | 1 pieza |
| Cable de extensión de antena GNSS | Cable de extensión de antena | 1 cable |
| Mando a distancia H16 | H16 | 1 unidad |
| Batería de 6S 10000mAh | 6S 10000 mAh | 1 juego |
| Batería de litio 3S 4000mAh | Batería 3S de 4000 mAh | 1 juego |
| Cargador de equilibrio inteligente | C1-XR | 1 unidad |
| Cable de red | 1,5 metros | 1 cable |
| Cuerda de seguridad | 50 metros | 1 paquete |
| Soporte HDMI | / | 1 pieza |
| Cable adaptador HDMI | / | 1 pieza |
| Configuración de la computadora | / | 1 pieza |
| Placa de caída 2D | 35×35 cm | 1 pieza |
| Caso de aviación | 740 × 540 × 510 mm | 1 juego |
| Paquete de cables de accesorios | / | 1 paquete |
| Certificado | / | 1 hoja |
| Lista de verificación de pruebas de función | / | 1 hoja |
Detalles
Plataforma de desarrollo de drones para investigación científica Prometheus 600
El Plataforma de desarrollo de drones para investigación científica Prometheus 600 (conocido como P600) es el producto de cuarta generación de la serie P600. Integra profundamente dos tecnologías centrales, Prometeo y SpireCVy está equipado con una cámara con cardán y zoom óptico de 40x. Esta configuración permite la detección y el seguimiento de objetivos a larga distancia, el aterrizaje autónomo desde grandes altitudes y las misiones de crucero aéreo.
El sistema admite SLAM 3D LiDAR con Rápido-lio, logrando un mapeo SLAM 3D de alta precisión. Además, cuenta con la Algoritmo de colaboración multiagente EGO-Swarm, permitiendo aplicaciones en diversos escenarios, como la reconstrucción espacial 3D en interiores y exteriores y la evitación de obstáculos durante la navegación con drones.
Estas capacidades avanzadas se complementan con la Estación terrestre profesional Prometheus, que proporciona retroalimentación visual en tiempo real, monitoreo de operación y ajuste dinámico de parámetros, lo que facilita que los desarrolladores dominen y aceleren el desarrollo secundario.

Tres versiones del dron P600

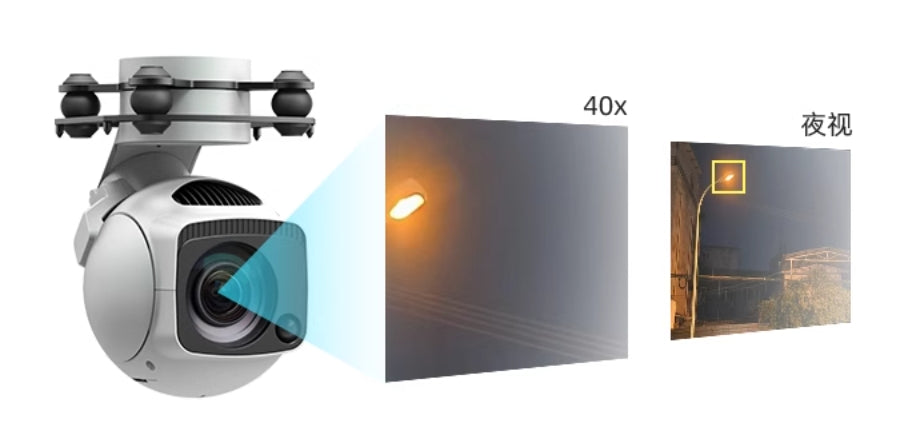
Control flexible del cardán óptico-electrónico
La cámara con cardán GX40 admite el control en múltiples escenarios e integra un control remoto basado en cadena para permitir la búsqueda de objetivos durante la navegación por puntos de referencia. Biblioteca de visión SpireCV, facilita la detección y seguimiento de objetivos, consiguiendo el bloqueo en tiempo real del gimbal en el objetivo.
- Iluminación nocturna
- Detección y seguimiento de objetivos

Clics y seguimiento de objetivos
Usando el Algoritmo de detección YOLOv5 y aprovechando el conjunto de datos universal COCO, se detectan y rastrean los objetivos. Algoritmo de seguimiento Nanotrack Se fija en objetivos seleccionados para realizar un seguimiento. Sin cambios en las condiciones, se pueden identificar y rastrear objetivos a una distancia de hasta 30 metros. Zoom óptico de 40x y zoom electrónicoSe logra la detección y el seguimiento de objetivos a larga distancia. Durante el seguimiento de drones, el Estación terrestre profesional Prometheus permite cambios dinámicos de seguimiento de objetivos basados en la distancia (el valor predeterminado es 10 metros).
- Seguimiento a 30m
- Seguimiento a 20m
- Seguimiento a 10m

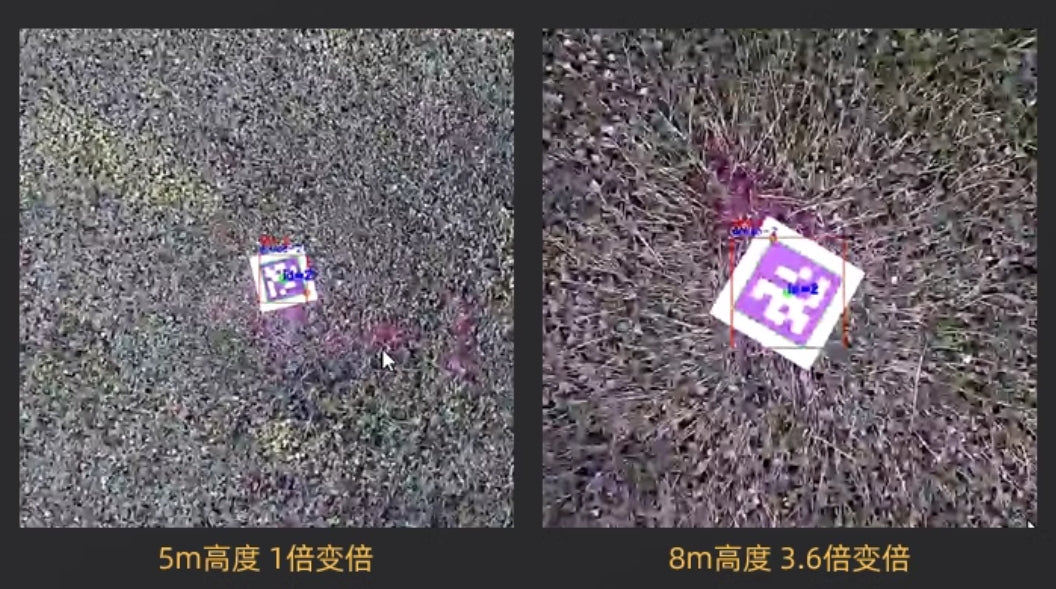
Aterrizaje guiado con código QR
Usando el Biblioteca de visión SpireCVSe logra una detección y estimación de posición precisas de los códigos QR. El GX40 puede realizar un aterrizaje guiado con precisión sobre códigos QR desde diferentes altitudes. El centro de la cámara del estabilizador se alinea con el centro del código QR dentro de un margen de error de 30 cm.
- 5 m de altitud, zoom 1x
- 8 m de altitud, zoom de 3,6x
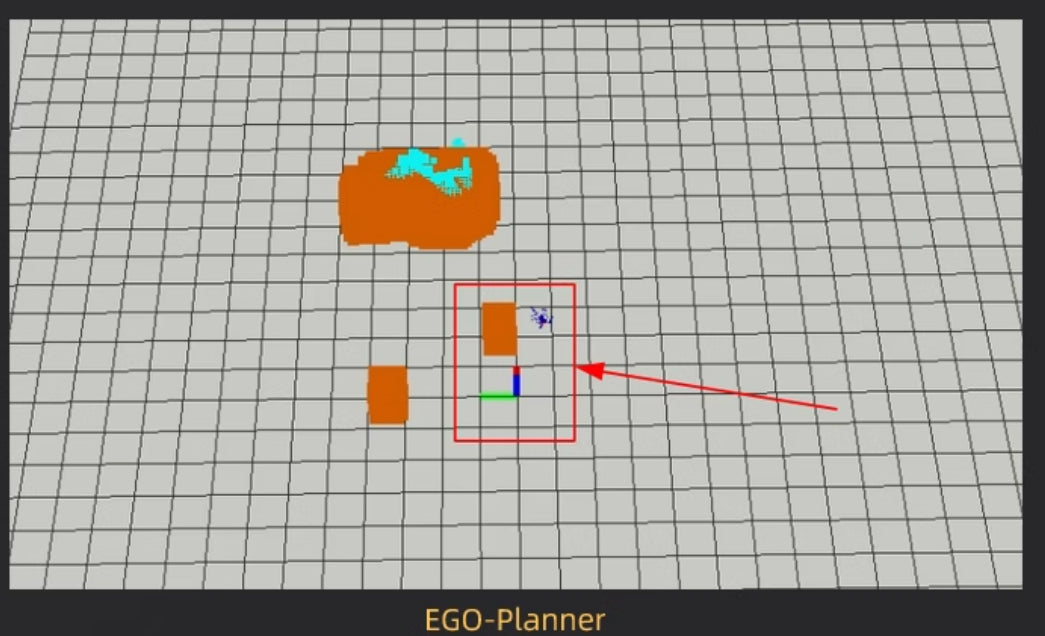
Planificador EGO
Apoya el Algoritmo de planificación de rutas EGO-Planner y proporciona Algoritmo de mapeo OctomapCombinado con la estación terrestre profesional, permite la planificación autónoma de rutas dinámicas en 3D.
Aplicaciones de control de drones estables y confiables
El dron P600 está equipado con equipo RTK de alta precisión, logrando un vuelo estacionario de alta precisión en exteriores con una precisión horizontal de hasta 1 cm y una precisión vertical de hasta 1,5 cm. Combinado con el Módulo de control del sistema de software PrometheusPermite un control preciso del dron.
El módulo de control del dron actúa como un "puente" entre los programas de software y el dron, proporcionando múltiples estados de control, como vuelo estacionario en posición inicial, vuelo estacionario en posición actual, aterrizaje y movimiento. Estos incluyen seis modos de control: posición habitual del sistema, velocidad, control integrado de posición y velocidad y modo de control de trayectoria. En total, ofrece siete modos de control.

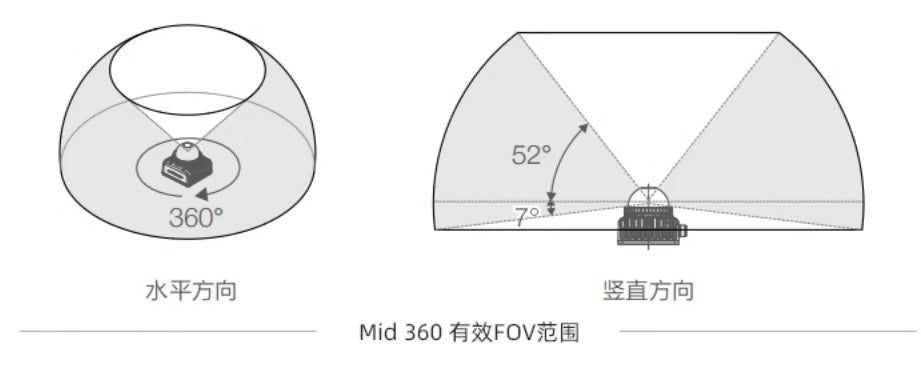
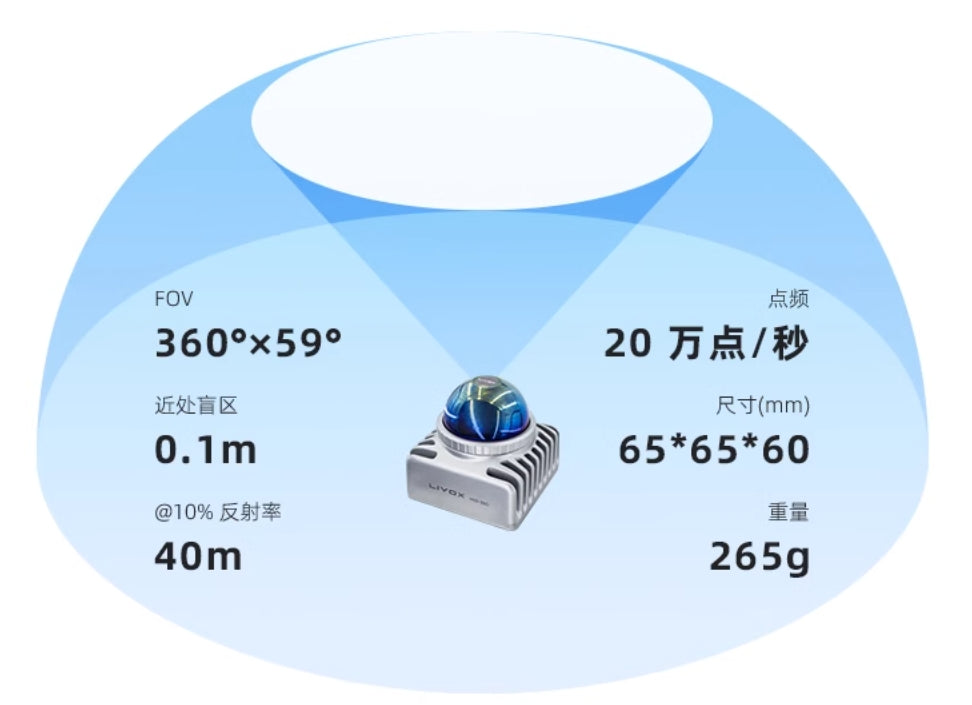
LiDAR 3D de alcance medio de 360°
- Zona ciega baja | Campo de visión amplio | Aplicación en múltiples escenarios
El Mediados de 360 cuenta con una Campo de visión horizontal de 360° y un Campo de visión vertical máximo de 59°Cuando la reflectividad del objeto objetivo es del 10%, el rango de detección máximo puede alcanzar 40 metros, y el rango de zona ciega es tan pequeño como 10 metrosSe adapta a diversos entornos complejos, como poca luz y luz fuerte.
Equipado con el módulo Mid-360, el Dron P600 Logra una cobertura panorámica de la zona ciega, lo que garantiza un funcionamiento perfecto de los drones en entornos de múltiples escenarios.
- Descripciones de diagramas:
- Dirección horizontal: 360°
- Dirección vertical: 52° campo de visión máximo

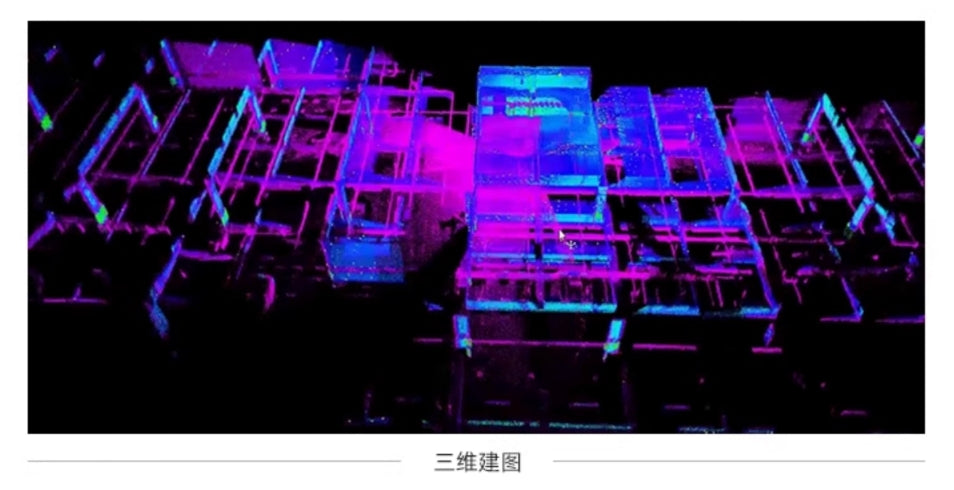
Mapeo ambiental 3D rápido y preciso
El Dron P600 Está equipado con capacidades avanzadas de detección ambiental, lo que le permite recopilar rápidamente datos ambientales circundantes durante el vuelo. Estos datos se procesan en tiempo real para generar un Mapa ambiental en 3D, proporcionando conocimiento espacial preciso y soporte de navegación para diversas tareas.
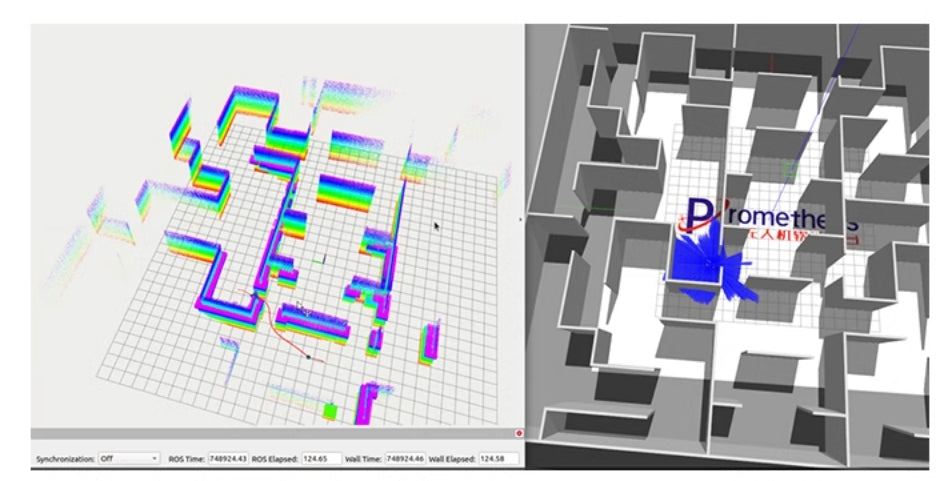
Planificación de rutas de enjambre EGO para navegación y evitación de obstáculos
El Mediados de 360 publica datos de nubes de puntos y datos de ubicación, combinados con Algoritmo de planificación de rutas EGO-Swarm, mejorando significativamente la capacidad del dron para adaptarse de forma autónoma a los cambios dinámicos del entorno. Puede analizar y responder en tiempo real a los obstáculos durante el movimiento y ajustar dinámicamente el objetivo de seguimiento con una velocidad máxima de 2 m/sEsto garantiza una flexibilidad y adaptabilidad excepcionales en escenarios operativos desconocidos y complejos.
Esta característica mejora enormemente la eficiencia de las tareas del dron, lo que le permite completar de manera eficiente y precisa una variedad de tareas.
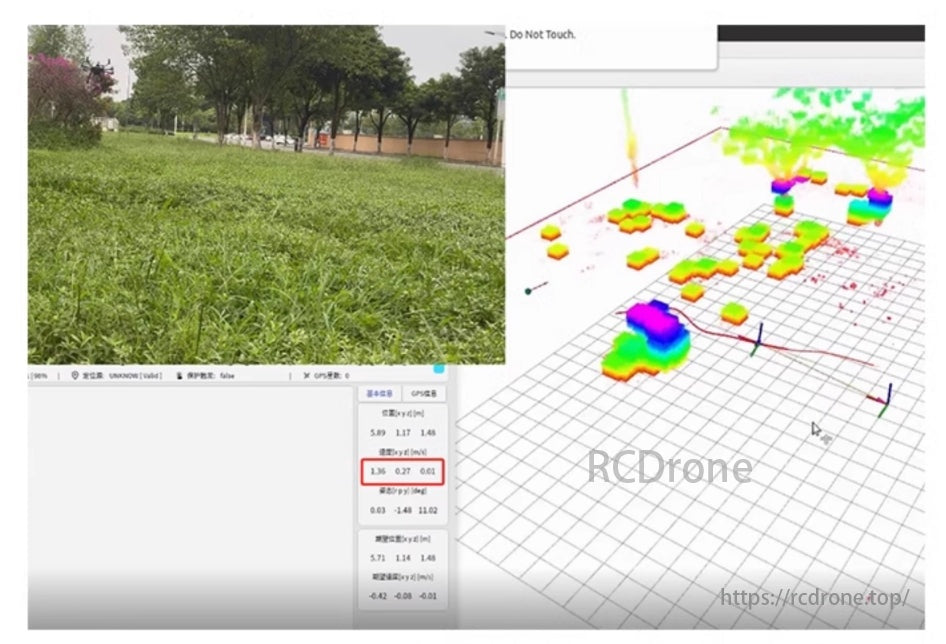
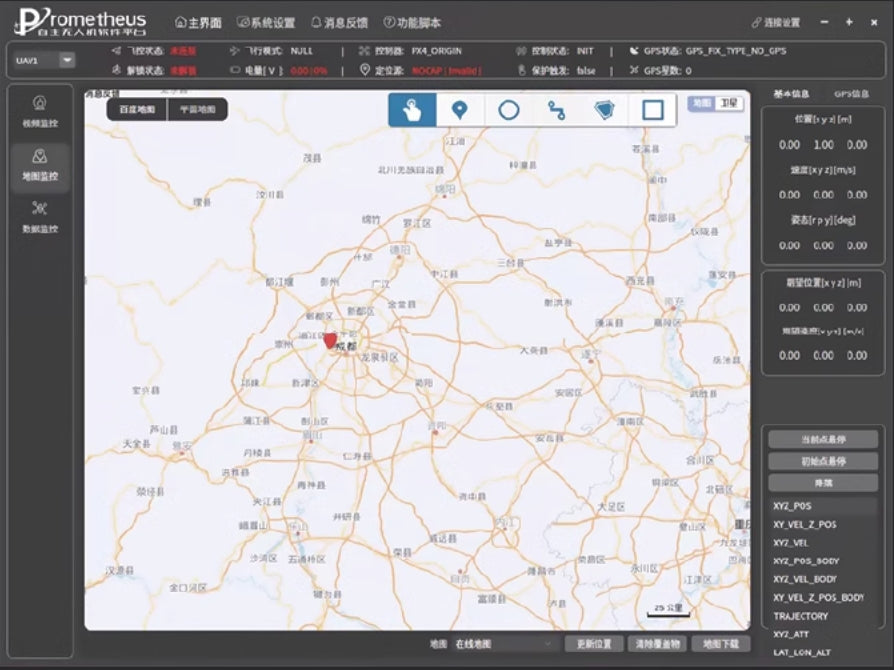
Interacción con drones de la estación terrestre profesional Prometheus
- Interacción con la estación terrestre
Esto muestra las capacidades de interfaz e interacción del Estación terrestre profesional Prometheus, lo que permite una comunicación y operación fluidas con el dron a través del mapeo ambiental en 3D.
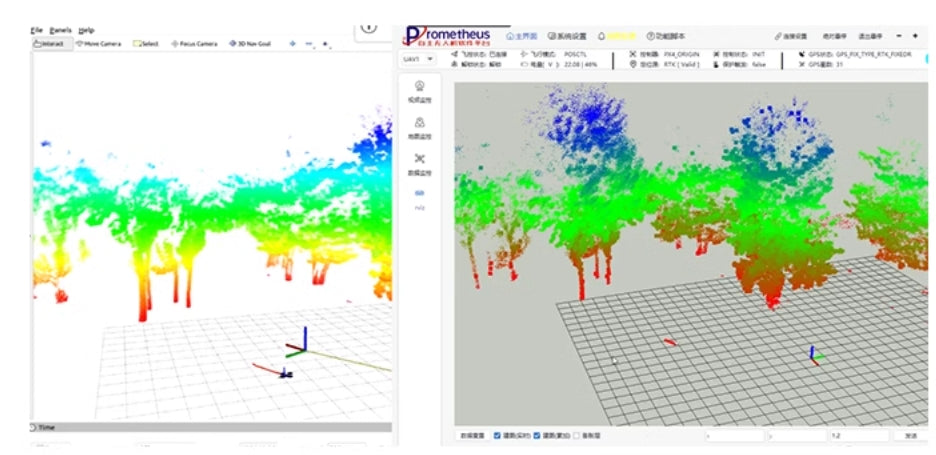
Demostración de la función de simulación integrada
- Planificación de rutas de enjambre EGO y SLAM LiDAR 3D simulado
Esto ilustra la simulación de GOLPE DE LIDAR 3D y Planificación de rutas de enjambre EGO dentro de un entorno estructurado, mostrando las capacidades del sistema en una demostración controlada.
Características del hardware
Marco de dron
El Kedway DP1000 La plataforma de drones de grado industrial utiliza un FOC (Control Orientado al Campo) Sistema de potencia que permite que el motor gire de manera estable, con poco ruido, alta eficiencia y rápida respuesta dinámica. Todo el sistema del dron alcanza un estado "listo para volar" con una excelente calidad de hardware, lo que garantiza un rendimiento de vuelo estable. Autonomía ultralarga (70 minutos sin carga útil), mientras que el Dron P600 requiere aproximadamente 24 minutos para estabilización Durante el posicionamiento.

Unidad de computación potente
- Unidad de computación de borde Allspark Micro, equipado con el Módulo NVIDIA Orin NX, proporcionando Potencia de cálculo de punto flotante de 100 TOPS.
- Tamaño compacto, peso ligero, fuerte compatibilidad del sistema y Computación de alto rendimiento acelerada por GPU.
- Preinstalado con todos los entornos de desarrollo, listo para usar, mejorando la eficiencia del desarrollo secundario.
- Dimensiones:102,5 mm × 62.5 mm × 31 mm

Controlador de transmisión de imágenes integrado
Un Control remoto para drones de grado industrial Combinando datos, imágenes y control en uno.
- Banda de frecuencia:2,4-2,483 GHz
- Distancia máxima de transmisión:30 kilómetros
- Calidad de imagen:1080P
- Duración de la batería:8-15 horas de funcionamiento continuo
Durante la operación del dron, los usuarios pueden monitorear información del dron en tiempo real, ver imágenes de la cámara y controlar simultáneamente el dron con el joystick, lo que garantiza una operación de vuelo completamente visualizada.

RTK de alta precisión y doble antena
El dron está equipado con un Módulo de posicionamiento RTK-GNSS, que utiliza tecnología de posicionamiento diferencial de fase portadora rápida y algoritmos de supresión de trayectos múltiples para proporcionar una precisión de posicionamiento centimétrica para drones. Puede recibir simultáneamente datos RTCM de múltiples estaciones de referencia terrestres, lo que admite cálculos RTK de línea base corta, media y larga.
Con multiidioma incorporado Interfaz gráfica de usuario webPermite una configuración sin umbral y procesos de actualización y visualización de datos. El receptor también cuenta con una interfaz de configuración de página web fácil de usar, lo que reduce significativamente la barrera operativa. Ofrece interfaces completas y se adapta a varios escenarios de aplicación, lo que brinda un rendimiento excepcional en posicionamiento preciso.

Gimbal óptico-electrónico 40x
Equipado con un cardán no ortogonal de 3 ejes de alta precisión, cuenta con una cámara con zoom óptico de 10x de 8,29 megapíxeles combinada con tecnología de zoom digital, logrando un aumento de hasta 40x. Puede generar 4K@30FPS video se transmite a través de la red. Además, está equipado con un módulo de iluminación láser, lo que permite obtener imágenes claras incluso en entornos completamente oscuros.
LiDAR 3D MID 360
El Mid-360 es un sensor de detección y medición láser rentable, seguro y confiable. Se utiliza ampliamente en campos como robots logísticos, robots industriales y ciudades inteligentes, y admite funciones como mapeo, posicionamiento, identificación y evitación de obstáculos. El Mid-360 puede detectar objetos a una distancia de hasta 0,1 metros y hasta 100 metros. Tiene un tamaño compacto, un amplio campo de visión, alta resolución, alta confiabilidad y una unidad de medición inercial integrada.
Presupuesto:
- Campo de visión:360° × 59°
- Distancia mínima de detección: 0,1 m
- Alcance (@10% de reflectividad):40 metros
- Frecuencia de puntos:200.000 puntos/segundo
- Dimensiones (mm): 65 × 65 × 60
- Peso:265 gramos
Características del software
Sistema de software Prometheus V2
La plataforma de desarrollo se basa en ROS y en el marco de código abierto Prometheus, que ofrece funcionalidades avanzadas y una gran cantidad de interfaces de desarrollo secundarias para una personalización eficiente. Proporciona interfaces para el estado del UAV y los datos de los sensores, incluida la información de ubicación, los modos de vuelo, el estado de la batería y la IMU. Además, ofrece interfaces de control para la posición, la velocidad, la aceleración y la actitud, así como programas de ejemplo para el uso de la interfaz de desarrollo. El UAV también incluye funciones integradas de inspección de seguridad de vuelo (no de evitación de obstáculos), lo que permite el aterrizaje automático en situaciones anormales para reducir los riesgos de choque, lo que hace que el desarrollo sea más seguro.

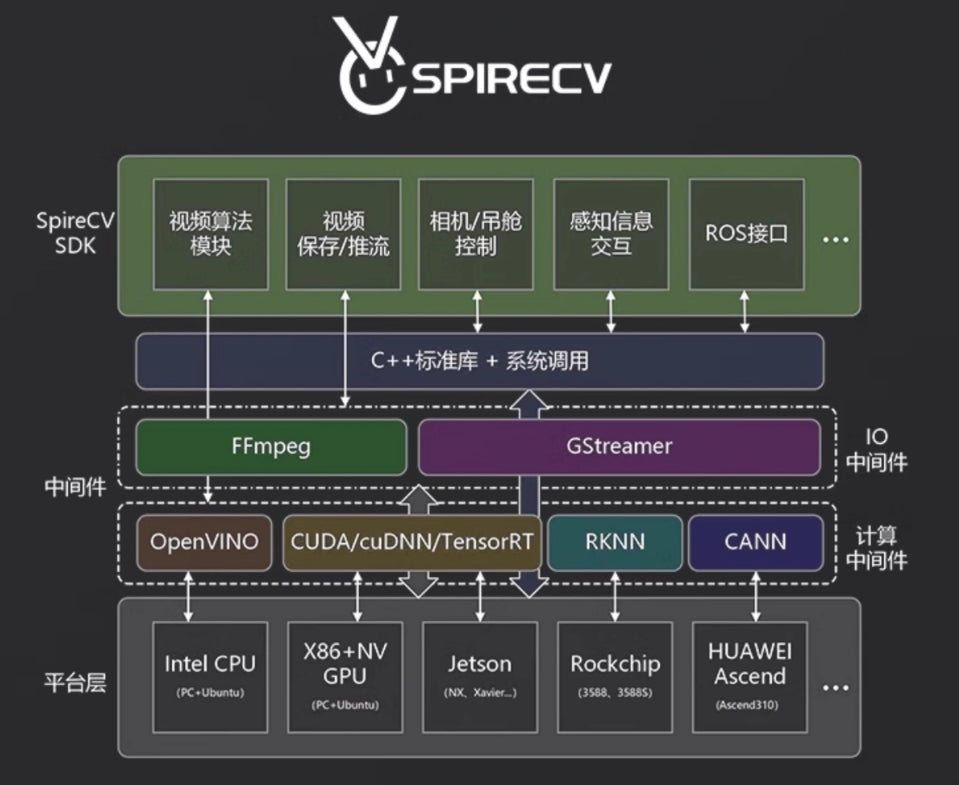
Biblioteca de visión SpireCV
Basado en la biblioteca de visión SpireCV, este es un SDK de procesamiento de imágenes en tiempo real integrado diseñado específicamente para sistemas inteligentes no tripulados. Sus principales características incluyen control de cardán/cámara, almacenamiento de video, transmisión, detección de objetivos, reconocimiento y seguimiento. Su objetivo es proporcionar a los desarrolladores de sistemas inteligentes no tripulados capacidades de procesamiento de visión de alto rendimiento, altamente confiables, simples y ricas en funciones. Este modelo admite el entrenamiento YOLO para la funcionalidad de seguimiento de vehículos con solo apuntar y hacer clic.
Sistema de estación terrestre Prometeo
La estación terrestre Prometheus es una interfaz hombre-máquina desarrollada con Qt, basada en el sistema Prometheus. Utiliza comunicación TCP/UDP para simplificar la configuración de la comunicación entre múltiples máquinas. La estación terrestre permite a los usuarios replicar rápidamente varias funciones del sistema Prometheus, proporcionando monitoreo en tiempo real del estado del UAV, así como funciones como operaciones de comando de control de posición, despegue y aterrizaje con un solo clic.
Aplicaciones
-
Investigación científica y desarrollo de inteligencia artificial
- Prueba de algoritmos de IA
- Análisis avanzado de datos de sensores
- Procesamiento y seguimiento de imágenes en tiempo real
-
Aplicaciones industriales
- Mapeo y navegación de precisión en entornos complejos
- Detección y evitación de obstáculos en logística y almacenamiento
- Inspección de infraestructura como líneas eléctricas y tuberías.
-
Usos académicos y educativos
- Programación secundaria para la investigación de IA basada en ROS
- Demostraciones y experimentos de laboratorio
- Formación en navegación autónoma de drones
-
Soluciones para ciudades inteligentes
- Reconstrucción espacial 3D para planificación urbana
- Monitoreo y gestión del tráfico
- Vigilancia y análisis ambiental
-
Desarrollo personalizado
- Prototipado para aplicaciones industriales especializadas
- Prueba e integración de nuevos componentes de hardware y software
-
Respuesta a desastres y monitoreo ambiental
- Inspección y vigilancia aérea en zonas afectadas por desastres
- Recopilación de datos ambientales para la investigación y la formulación de políticas
El P600 ofrece una flexibilidad y funcionalidad incomparables, lo que permite a los investigadores, ingenieros y desarrolladores ejecutar proyectos complejos en diversos escenarios.
Related Collections







