HEX Pixhawk 2.1 PX4 PIX 32 Bit Flight Controller Autopilot - The Cube Orange + مجموعه استاندارد W/ Here 3 GPS & ADS-B Carrier Board
HEX Pixhawk 2.1 PX4 PIX 32 Bit Flight Controller Autopilot - The Cube Orange + مجموعه استاندارد W/ Here 3 GPS & ADS-B Carrier Board
RCDrone
در دسترس بودن پیکاپ بارگیری نشد
مشخصات
فاصله محوری: پیچ
استفاده: اسباببازیهای وسایل نقلیه و کنترل از راه دور
ارتقای قطعات/لوازم جانبی: Arm
لوازم ابزار: کلاس مونتاژ شده<3
پارامترهای فنی: مقدار 2
اندازه: 1
لوازم جانبی/دستگاه های کنترل از راه دور: سرویس ها
سن پیشنهادی: 12+y
RC قطعات و Accs: Servos
تعداد: 1 عدد
منشا: سرزمین اصلی چین
شماره مدل: HEX-CUBE+
مواد: فلز
ویژگی های چهارچرخ متحرک: مجموعه
برای نوع خودرو
گواهینامه: CE
نام تجاری: Feetech لطفاً توجه داشته باشید: تفاوت بین Cube Orange و Cube Orange+ در این است که Cube Orange را می توان به سیستم عامل PX4 ارتقا داد، در حالی که Cube Orange+ از ارتقاء سیستم عامل PX4 پشتیبانی نمی کند برای اطلاعات بیشتر، لطفاً به وب سایت رسمی مراجعه کنید:https://docs.cubepilot.org/user-guides/autopilot/the-cube-module-overview
ویژگی ها
- پشتیبانی از حالت های متعدد مانند Loitering، Altitude Hold، حالت (با Waypoint)، حالت دنبال کردن و غیره
- پشتیبانی از Mission Planner و ایستگاه های کنترل زمینی QGroundControl
- پرواز داخلی logging
- انتقال اطلاعات پرواز در زمان واقعی
- پشتیبانی از اجتناب از شی 360 درجه
- مجهز به پردازنده H7 با کارایی بالا
H7 دارای دو- FPU دقیق (DP)، رم 1 مگابایتی و پردازنده CPU 400 مگاهرتز، کارایی بالا، عملکرد بسیار سریع و راه حلی پایدار برای پرواز ارائه می دهد.
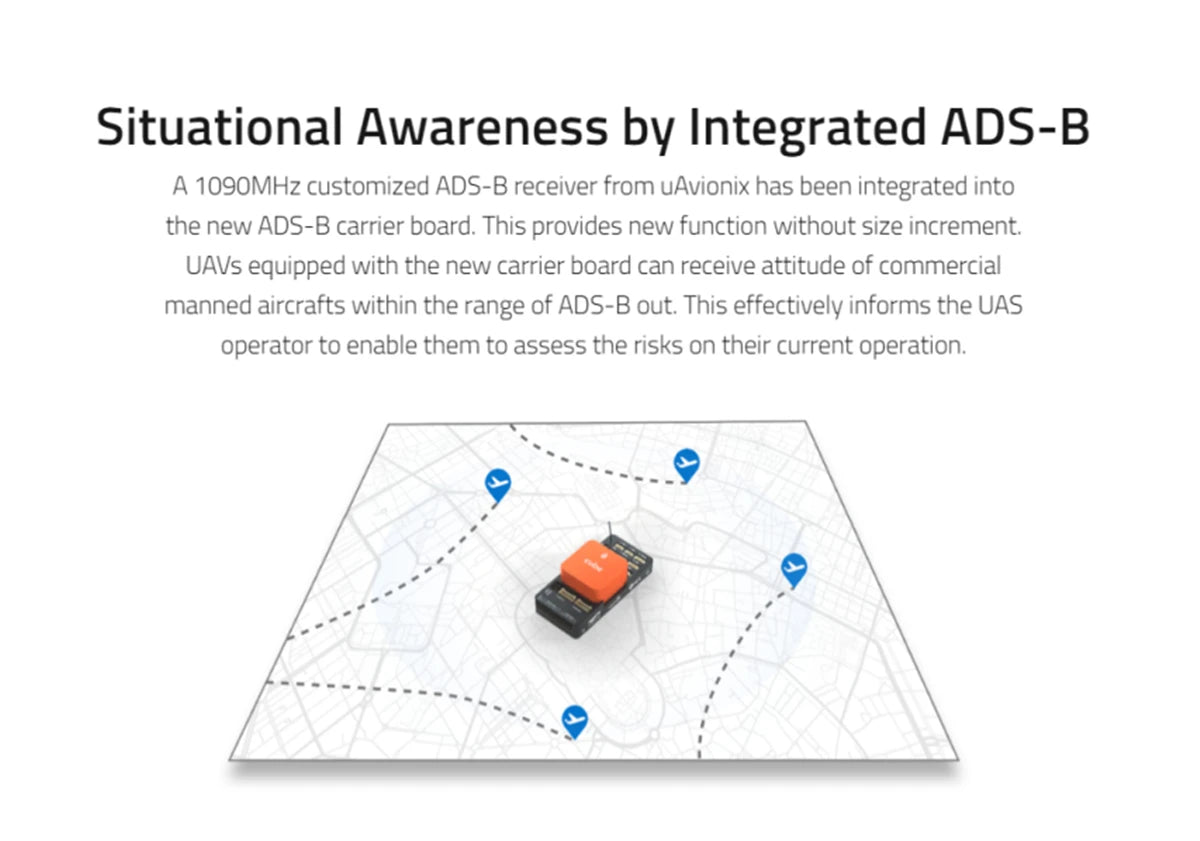
- آگاهی از موقعیت توسط یکپارچه ADS-B
A 1090MHz سفارشی گیرنده ADS-B از uAvionix در برد حامل جدید ADS-B ادغام شده است. این عملکرد جدید را بدون افزایش اندازه ارائه می دهد. پهپادهای مجهز به برد حامل جدید می توانند نگرش هواپیماهای سرنشین دار تجاری در محدوده ADS-B را دریافت کنند. این به طور موثر به اپراتور UAS اطلاع می دهد تا آنها را قادر سازد تا خطرات عملکرد فعلی خود را ارزیابی کنند.
تغییر آسان ولتاژ سیگنال خروجی PWM
خروجی PWM از سوئیچینگ بین سطوح سیگنال 3.3 ولت و 5 ولت پشتیبانی می کند. سوئیچینگ ولتاژ توسط نرم افزار ایستگاه کنترل زمین قابل انجام است. این امر سازگاری با تجهیزات جانبی مختلف خارجی را بهبود می بخشد.
پشتیبانی از انواع خودروها: از جمله هلیکوپتر، مولتیکوپتر، بال ثابت، VTOL، مریخ نورد، قایق، زیردریایی و غیره.
جزئیات محصول
پردازشگر اصلی سیستم IMUجزئیات حسگرها:ICM20649(شتاب سنج+ژیروسکوپ یکپارچه)
ICM20602(شتاب سنج+ژیروسکوپ یکپارچه)
ICM20948(شتابسنج یکپارچه+ژیروسکوپ+مغناطیسسنج)
انواع وسایل نقلیه پشتیبانیشده: هواپیماهای با بال ثابت، بالگردهای با 3 تا 8 موتور، هلیکوپتر، هواپیماهای VTOL، مریخنوردها/قایقها/زیردریاییها
وزن: 73g><4 :CNC آلیاژ آلومینیوم (مکعب) + قالب گیری ABS (تخته حامل)
مکعب اندازه:38.4x38.4x22mm
تخته حامل:94.5x44.3x17.3mm
دمای عملیاتی:-10~+55° IMU با کنترل دما
PWM I/Os:14
رابط سریال Mavlink:2
تعداد GPS پشتیبانی شده:2
رابط Debug:1
اینترفیس I2C:1
رابط CAN:2
اینجا3
GNSS:بله
قطبنما:بله
پروتکل:CAN
سیستم عامل بلادرنگ:بله
بهروزرسانی میانافزار:بله
RTK:بله
ضد ضد گرد و غبار,Y نوع گیرنده T5792> پردازنده : STM32F302
وزن:48.8g





HEX Pixhawk 2.1 از PX4 پیشرفته ترین خلبان خودکار جهان برای وسایل نقلیه بدون سرنشین خودران باز است. این کنترلر مکعبی شکل دارای اجزای اضافی، کنترل شده با دما و جدا شده است.
برد حامل دارای یک گیرنده ADS-B سفارشی شده از uAvionix است که با فرکانس 1090 مگاهرتز کار می کند، که اپراتورهای UAS را قادر می سازد تا خطرات احتمالی را در عملیات فعلی خود ارزیابی کنند.

خروجی PWM از سوئیچینگ بین سطوح سیگنال 3.3 ولت و 5 ولت پشتیبانی می کند و به شما این امکان را می دهد که از نرم افزار ایستگاه کنترل زمین برای جابجایی بین این دو سطح ولتاژ استفاده کنید.
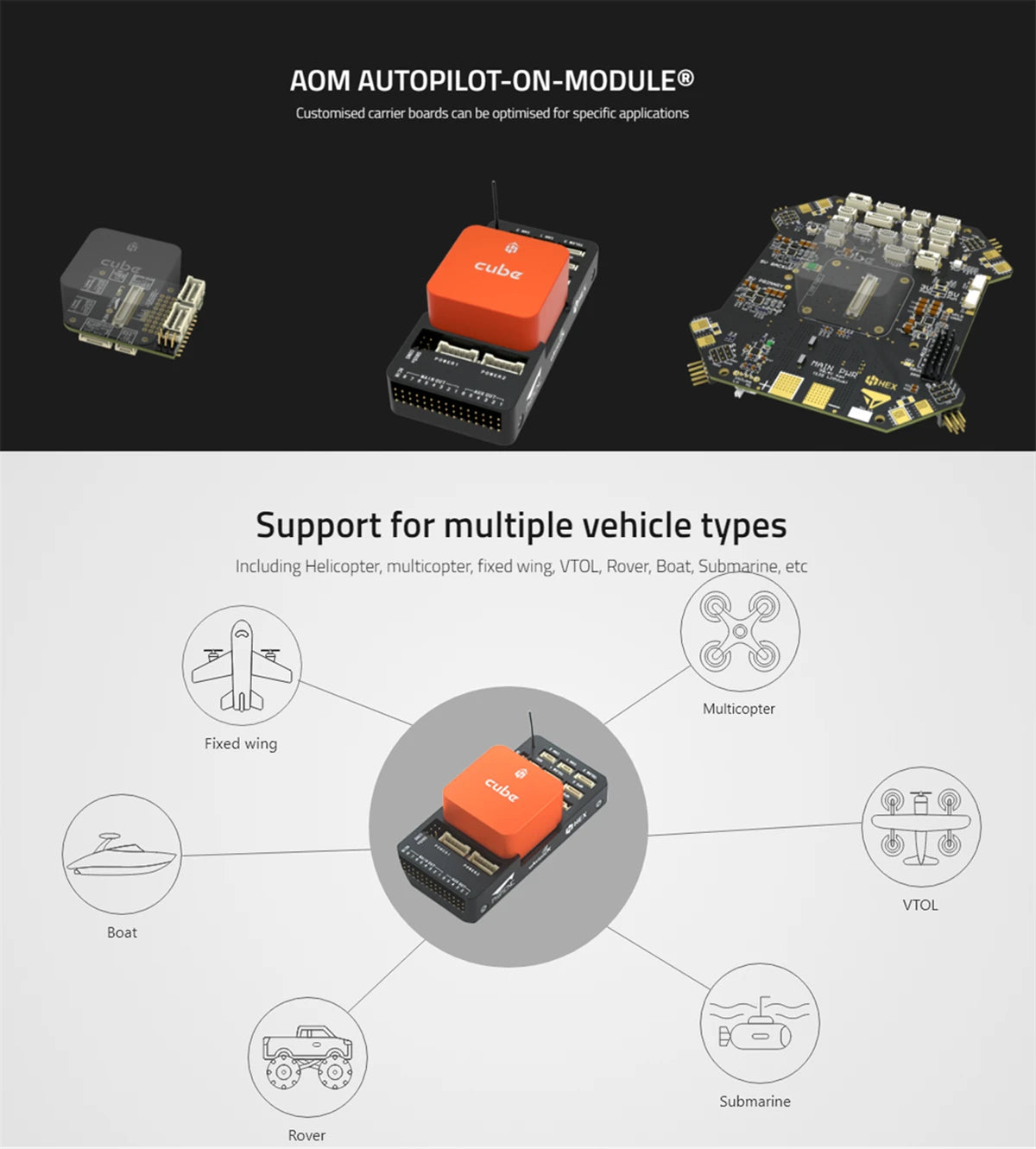
APM (Autopilot-on-Module) تابلوهای حامل سفارشی سازی شده را ارائه می دهد که می توانند برای کاربردهای خاص بهینه شوند و از انواع وسایل نقلیه از جمله هلیکوپتر، چند کوپتر، هواپیمای بال ثابت، VTOL، مریخ نورد، قایق، زیردریایی پشتیبانی می کنند. و بسیاری دیگر.
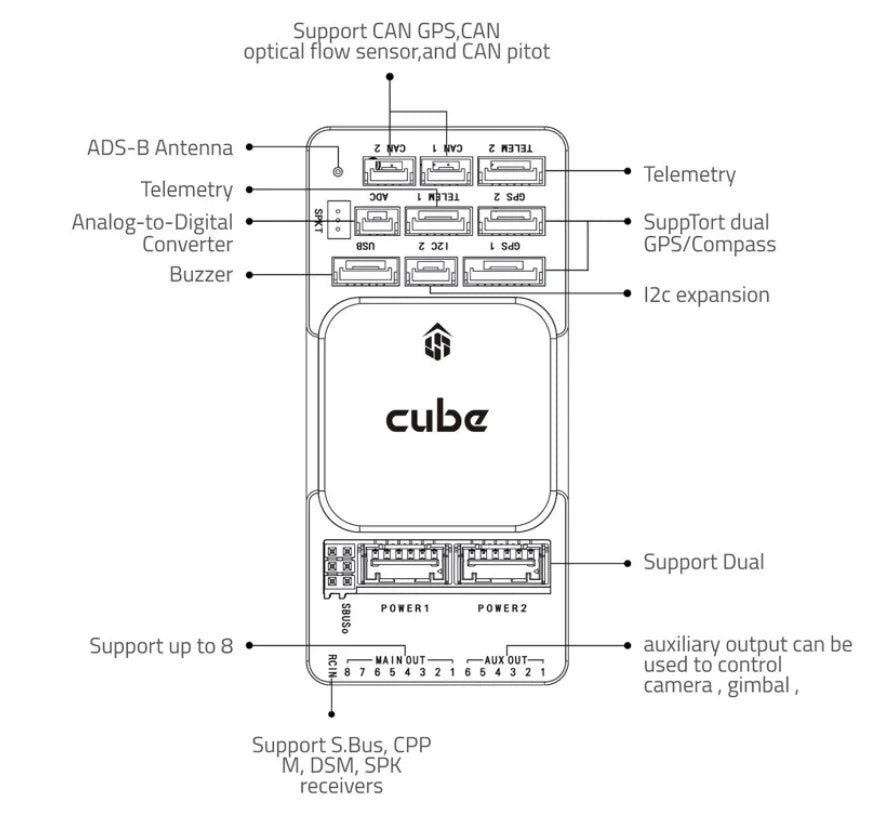
این کنترلر پرواز از تجهیزات جانبی مختلفی پشتیبانی می کند، از جمله: * گذرگاه CAN برای GPS، سنسور جریان نوری و داده های پیتوت * آنتن ADS-B برای ناوبری پیشرفته * ویژگی های تله متری با تبدیل آنالوگ به دیجیتال SD9 * قابلیت های گسترش I2C برای سنسورها یا دستگاه های اضافی * گزینه های منبع تغذیه دوگانه برای افزونگی * حداکثر 8 خروجی کمکی که می توان برای کنترل دستگاه های مختلف از جمله: + 6 دوربین یا گیمبال از طریق پروتکل S-Bus

این کنترلر پرواز دارای طراحی ارتقا یافته با مقاومت در برابر آب است که آن را برای استفاده در محیط های مختلف مناسب می کند. علاوه بر این، دارای یک تراشه GNSS با دقت بالا مقرون به صرفه است که قابلیت های موقعیت یابی دقیق را امکان پذیر می کند (توجه داشته باشید: یک ایستگاه پایه برای حالت واقعی سینماتیک (RTK) مورد نیاز است).
Related Collections