برد گیرنده GNSS مدل ZED-F9P-01B-01 RTK با USB-C، UART2 RTCM3، آنتن SMA & U.FL ، مناسب برای Pixhawk GH1.25-6P
برد گیرنده GNSS مدل ZED-F9P-01B-01 RTK با USB-C، UART2 RTCM3، آنتن SMA & U.FL ، مناسب برای Pixhawk GH1.25-6P
RCDrone
در دسترس بودن پیکاپ بارگیری نشد
بررسی اجمالی
این برد گیرنده GNSS بر اساس ماژول u-blox ZED-F9P-01B-01 ساخته شده و از پشتیبانی موقعیتیابی تفاضلی RTK با پورت USB-C، پینهای UART/SPI و گزینههای اتصال آنتن دوگانه برای ادغام در رباتیک، سیستمهای خودکار و ناوبری برخوردار است.
ویژگیهای کلیدی
- رابط USB: اتصال USB نوع-C برای پیکربندی با u-center و مشاهده سریع جملات NMEA؛ به عنوان یک پورت COM سری مستقل از رابط UART شناسایی میشود.
- گزینههای تغذیه: رگولاتور 3.3V روی برد، 5V USB را به 3.3V مورد نیاز ماژول تبدیل میکند؛ از ورودی 5V خارجی یا تغذیه مستقیم 3.3V پشتیبانی میکند.
- توصیه 3.3V با نویز کم: هنگام تأمین 3.3V به طور مستقیم، تأمین تمیز با حداقل نویز توصیه میشود (نوسان PVP کمتر از 50mV به عنوان ایدهآل برای موقعیتیابی دقیق ذکر شده است).
- اشتراکگذاری UART/SPI: پینهای سری کلاسیک در دسترس هستند اما با پینهای SPI مشترک هستند؛ به طور پیشفرض پینهای UART فعال هستند.DSEL جامپر در پشت برد باید باز باشد.
- مدیریت RTCM3 بر روی UART2: یک پورت سریال دوم (UART2) عمدتاً برای دادههای تصحیح RTCM3 استفاده میشود؛ به طور پیشفرض به طور خودکار RTCM3 ورودی را دریافت و تجزیه میکند تا حالت RTK فعال شود. در حالت ایستگاه پایه، UART2 دادههای تصحیح RTCM3 را خروجی میدهد.
- کانکتور خودکار: GH1.25-6P (استاندارد Pixhawk JST-GH) برای اتصال به خودکار Pixhawk و/یا تأمین برق برد.
- کانکتورهای آنتن: دو رابط آنتن ارائه شده است: SMA (پیچ خارجی، سوراخ داخلی) و U.FL (IPEX)؛ هر کدام میتوانند استفاده شوند.
- LEDهای وضعیت: چهار LED وضعیت (قدرت، PPS، RTK، FENCE) برای نشان دادن سیستم/RTK/جغرافیای حفاظتی.
مشخصات
| ماژول GNSS (برچسب ماژول) | u-blox ZED-F9P-01B-01 |
| علامتگذاری برد (قابل مشاهده در عکس برد) | ZED-F9P-01B-00 |
| USB | USB نوع-C؛ به عنوان پورت سری COM شناسایی میشود (مستقل از UART) |
| سری / SPI | پینهای UART با پینهای SPI مشترک هستند؛ UART به طور پیشفرض فعال است؛ جامپر DSEL در پشت باید باز باشد |
| جهت پین UART (مشترک با SPI) | TX/MISO = خروجی از ZED-F9P؛ RX/MOSI = RX به ZED-F9P |
| پورت سری دوم | UART2 (عمدتاً برای دادههای اصلاحی RTCM3؛ میتواند RTCM3 را در حالت ایستگاه پایه خروجی دهد) |
| تنظیم ولتاژ | رگولاتور 3.3V برای تنظیم 5V USB به 3.3V مورد نیاز ماژول |
| گزینههای ورودی برق (بیان شده) | USB 5V، 5V خارجی، یا تغذیه مستقیم 3.3V |
| یادداشت نویز تأمین 3.3V (بیان شده) | نوسان PVP کمتر از 50mV به عنوان ایدهآل هنگام تأمین 3.3V به طور مستقیم بیان شده است |
| قابلیت رگولاتور 3.3V (بیان شده) | 600mA از ورودی 5V |
| قابلیت برق USB-C (بیان شده) | قادر به ارائه 2A |
| پورت J3 | GH1.25-6P (استاندارد Pixhawk JST-GH) |
| پیناوت J3 (استاندارد Pixhawk) | 1: 5V_IN; 2: دریافت UART1 ZED-F9P (سطح 3.3V); 3: TX UART1 ZED-F9P (سطح 3.3V); 4,5: متصل نیستند; 6: زمین |
| شاخصهای LED (توصیف شده) | برق (قرمز هنگام 3.3V فعال از طریق USB یا باس Qwiic); PPS (زرد، یک بار در ثانیه پس از قفل موقعیت); RTK (آبی: روشن پس از روشن شدن، چشمک زن پس از دریافت دادههای RTCM، خاموش پس از اصلاح RTK); FENCE (قابل تنظیم برای برنامههای جغرافیایی) |
| رابطهای آنتن | SMA و U.FL (IPEX); هر دو رابط قابل قبول است |
| برچسبهای هدر (چاپ سیلک، سمت چپ) | GND, 3V3, SDA, SCL, FENCE, RTK, PPS, RST, SAFE, INT |
| برچسبهای هدر (چاپ سیلک، سمت راست) | GND, 5V, 3V3, TX2, RX2, CS, RX/MOSI, TX/MISO, SCK |
برنامهها
- موقعیتیابی RTK GNSS برای پهپادها، UGVها، رباتیک و پروتوتایپهای ناوبری
- ادغام GNSS Pixhawk/autopilot از طریق JST-GH (GH1.25-6P) اتصال سریال
- تنظیمات RTK مبتنی بر RTCM3 با استفاده از UART2 برای لینکهای داده اصلاحی (رادیویی یا سیمی)
برای سوالات مربوط به سازگاری (انتخاب UART/SPI، سیمکشی RTCM3، آنتنها یا ادغام)، با پشتیبانی تماس بگیرید در https://rcdrone.top/ یا ایمیل بزنید به [email protected].
جزئیات

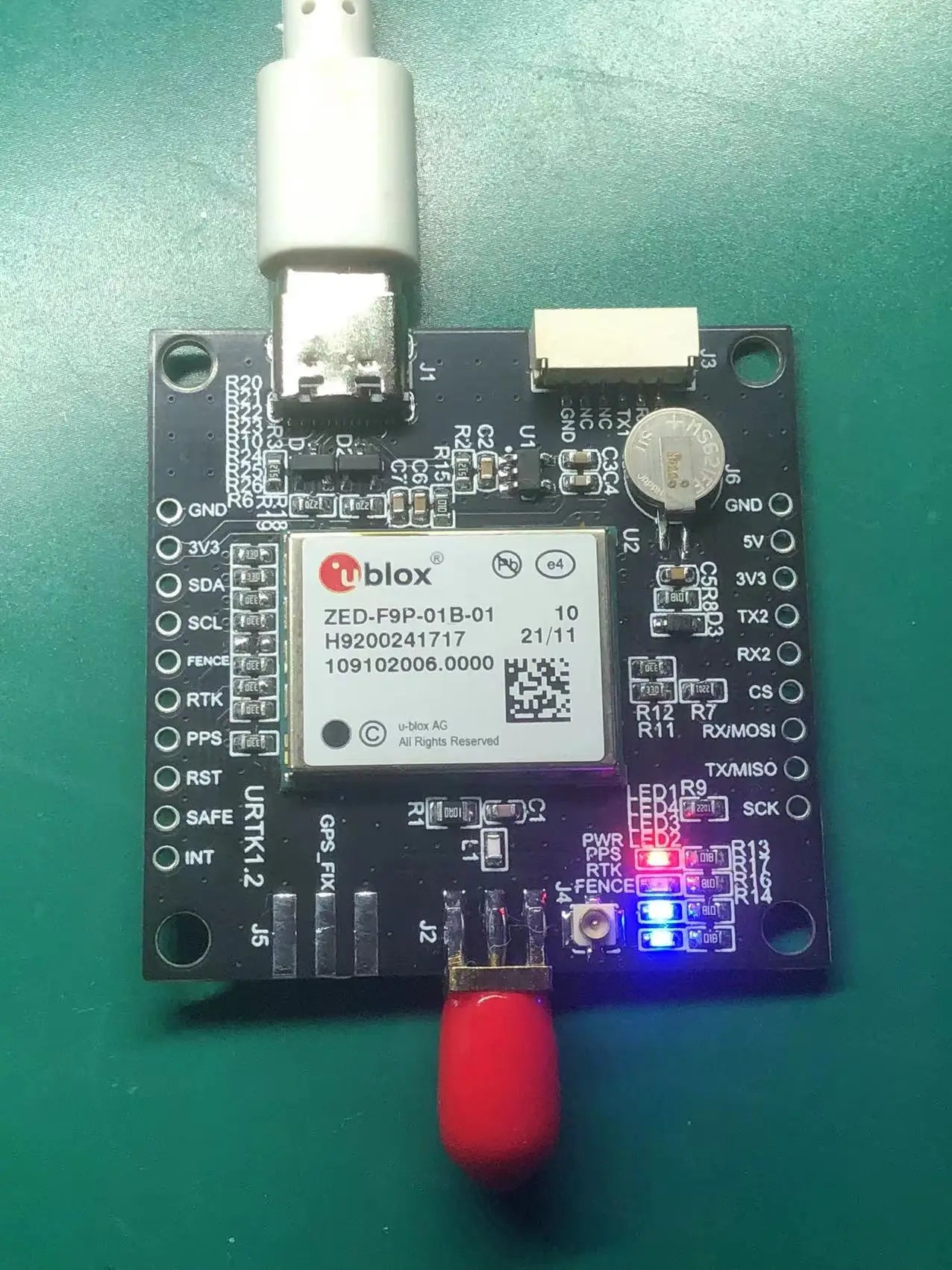
برد گیرنده ZED-F9P یک اتصال USB-C را با پینهای ورودی/خروجی بهوضوح علامتگذاری شده و یک U.FLکانکتور آنتن برای ادغام آسان ترکیب میکند.
رابط USB‑C ZED‑F9P را به u‑center یا Raspberry Pi به عنوان یک پورت سریال COM مستقل متصل میکند، با تنظیم 3.3V داخلی از منبع تغذیه USB 5V.
برد ZED-F9P از پینهای مشترک UART/SPI و یک پورت سریال دوم (UART2) که معمولاً برای دادههای اصلاحی RTCM3 استفاده میشود، برای فعالسازی حالت RTK استفاده میکند.
پینخارجی کانکتور J3 GH1.25-6P Pixhawk شامل 5V_IN، UART1 RX/TX (3.سطح 3 ولت) و زمین، و برد از چهار LED وضعیت برای قدرت، قفل PPS و فعالیت RTK/RTCM استفاده میکند.
برد گیرنده GNSS RTK ZED-F9P دو گزینه رابط آنتن—SMA و U.FL (IPEX)—برای نصب انعطافپذیر ارائه میدهد.
Related Collections