




کیت بازوی رباتیک CEREBOTO OpenArm ۷ درجه آزادی – قابل سفارش به صورت DIY یا مونتاژ شده، کنترل متنباز با ROS/Python
کیت بازوی رباتیک CEREBOTO OpenArm ۷ درجه آزادی – قابل سفارش به صورت DIY یا مونتاژ شده، کنترل متنباز با ROS/Python
CEREBOTO
در دسترس بودن پیکاپ بارگیری نشد
Overview
بازوی رباتیک CEREBOTO OpenArm 7DOF یک بازوی رباتیک با کیفیت تحقیقاتی و مقیاس انسانی است که برای دانشگاهها، آزمایشگاهها، استارتاپها و سازندگان جدی طراحی شده است. با 7 درجه آزادی، دامنه بازو 633 میلیمتر، بار معمولی 4.1 کیلوگرم و بار حداکثری 6.0 کیلوگرم برای هر بازو، OpenArm حرکات با دقت بالا، تعامل فیزیکی ایمن و ابزارهای متنباز غنی را ارائه میدهد.
شما میتوانید یک کیت سختافزاری DIY برای مونتاژ کامل و دستی انتخاب کنید، یا یک بازوی آماده به استفاده که کارخانه آن را کالیبره کرده است. پیکربندیهای تکبازو، دو بازو و چهار بازو در دسترس هستند.
ویژگیهای کلیدی
-
بازوی رباتیک 7DOF با مقیاس انسانی – طراحی شده برای مطابقت با طول بازوی انسانی 160–165 سانتیمتر برای دستکاری طبیعی و کنترل از راه دور.
-
بار بالا &و ثبات – بار معمولی 4.1 کیلوگرم، بار حداکثری 6.0 کیلوگرم برای هر بازو، با وزن بازوی سبک 5.5 کیلوگرم.
-
موتورهای قابل بازگشت &و ساختار سازگار – تعامل ایمن و روان برای همکاری انسان و ربات و وظایف کنترل شده با نیرو.
-
حلقه کنترل CAN-FD با فرکانس 1 کیلوهرتز – کنترل بلادرنگ و با تأخیر کم برای تحقیقات با عملکرد بالا و کاربردهای صنعتی.
-
ساختار تمام فلزی – ساختار اصلی محکم از آلیاژ آلومینیوم و فولاد ضد زنگ برای سفتی و دوام.
-
سختافزار &و نرمافزار متن باز – CAD، PCB، نرمافزارهای فریمور و کنترل متن باز برای سفارشیسازی عمیق.
-
پشتیبانی از ROS، Python و C++ – ادغام رسمی ROS به همراه APIهای Python/C++ برای توسعه سریع الگوریتمها.
-
اکوسیستم غنی و گسترش – پشتیبانی از دستهای رباتیک چابک، دستکشهای ضبط حرکت و پایههای متحرک برای پلتفرمهای رباتیک کامل.
مشخصات فنی
-
درجه آزادی: 7 DOF برای هر بازو
-
برد بازو: 633 میلیمتر
-
بار معمولی: 4.1 کیلوگرم
-
بار اوج: 6.0 کیلوگرم برای هر بازو
-
وزن بازو: تقریبا 5.5 کیلوگرم برای هر بازو
-
مواد: قطعات ساختاری آلومینیوم-آلیاژ و استیل ضد زنگ
-
رابط کنترل: CAN / CAN-FD، UART (از طریق آداپتور USB2CANFD-X2 شامل شده در نسخههای دو/چهار بازو)
-
فرکانس کنترل: تا 1 کیلوهرتز حلقه CAN-FD
-
پشتیبانی نرمافزاری: فریمورک ROS، API پایتون، API C++
-
ارگونومی: طول بازو مناسب برای کاربران با قد 160–165 سانتیمتر
نرمافزار &و اکوسیستم متنباز
OpenArm یک پلتفرم باز برای بازوهای رباتیک کاملاً متنباز است.منابع رسمی شامل:
-
وبسایت: openarm.dev
-
مستندات: docs.openarm.dev
-
گیتهاب: github.com/enactic/openarm
-
ویدئوی آموزشی: راهنمای رسمی یوتیوب برای شروع
با فایلهای CAD، PCB و firmware باز، میتوانید مکانیک، الکترونیک و نرمافزار کنترل را تغییر دهید یا بازو را با حسگرها و ابزارهای انتهایی جدید برای موضوعات تحقیقاتی خود گسترش دهید.
سناریوهای کاربردی معمولی
OpenArm به عنوان یک پلتفرم تحقیقاتی و آموزشی چندمنظوره و با دقت بالا طراحی شده است برای:
-
دورههای رباتیک دانشگاهی و آزمایشهای آزمایشگاهی
-
موسسات تحقیقاتی و پروژههای آزمایشگاهی
-
تحقیقات یادگیری تقویتی و هوش مصنوعی مبتنی بر فیزیک
-
تعامل انسان و ربات و مطالعات رباتهای همکاریکننده
-
فضاهای سازندگان و تیمهای سختافزار متنباز
-
پلتفرمهای آموزش و تربیت مهندسی
با اندازه انسانی و عملگرهای سازگار خود، OpenArm برای دستکاری، کنترل از راه دور، یادگیری تقلیدی، رباتیک کمکی و بیشتر ایدهآل است.
نسخههای محصول &و پیکربندیها
نسخه 1 – کیت سختافزاری DIY
-
برای کاربرانی با مهارتهای عملی قوی که میخواهند ساختار مکانیکی را بهطور عمیق درک کنند.
-
شامل تمام قطعات مکانیکی، الکتریکی و چاپ شده با 3D؛ شما بازو را خودتان با دنبال کردن راهنما مونتاژ و کالیبره میکنید.
نسخه 2 – بازوی رباتیک آماده
-
برای موسسات تحقیقاتی، آزمایشگاهها، شرکتها و مربیانی که به یک پلتفرم آماده به کار نیاز دارند.
-
کاملاً مونتاژ شده، تنظیم شده و کالیبره شده قبل از ارسال؛ آماده استفاده از جعبه.
پیکربندیهای موجود بازو (بسته به فهرست):
-
کیت DIY – بازوی تک
-
بازوی آماده – بازوی تک
-
کیت DIY – بازوهای دوگانه
-
بازوهای آماده – بازوهای دوگانه
-
کیت DIY – بازوهای چهارگانه
-
بازوهای آماده – بازوهای چهارگانه
محتویات بسته
هر کیت OpenArm یا سیستم آماده معمولاً شامل:
-
اجزای ساختاری اصلی از آلیاژ آلومینیوم و فولاد ضد زنگ
-
موتورها، بردهای درایور، منبع تغذیه و کابلها
-
قطعات چاپ شده سهبعدی و مجموعه پیچها
نسخههای دو بازو و چهار بازو: یک دستگاه USB2CANFD-X2 سازگار با BOM رسمی (CEREBOTO نماینده مجاز داخلی است) برای ارتباط PC به CAN-FD.
پشتیبانی از افزونههای سختافزاری
OpenArm از چندین افزونه سختافزاری (بهصورت جداگانه فروخته میشود) پشتیبانی میکند و به شما این امکان را میدهد که یک سیستم رباتیک کامل بسازید:
-
دست رباتیک چابک – برای تحقیق در زمینه دستکاری دقیق و گرفتن.
-
ست دستکش ضبط حرکت – برای تلواپراتوری شهودی و یادگیری تقلیدی.
-
پایه متحرک – برای تبدیل OpenArm به یک پلتفرم دستکاری متحرک.
سوالات متداول
س: آیا میتوان از بازوی رباتیک بلافاصله استفاده کرد؟
ج: نسخه بازوی آماده بهطور کامل در کارخانه تنظیم و کالیبره شده است—فقط آن را روشن کنید و شروع به کار کنید. کیت سختافزاری DIY نیاز دارد که شما سیستم را طبق دستورالعملها مونتاژ و راهاندازی کنید.
س: آیا OpenArm با ROS یا سایر میانهافزارها سازگار است؟
ج: بله. OpenArm بهطور رسمی از فریمورک ROS پشتیبانی میکند و شما میتوانید بازو را از طریق APIهای Python و C++ کنترل کنید.
س: این محصول برای چه کسانی است؟
ج: محققان دانشگاهها و مؤسسات، آزمایشگاههای هوش مصنوعی و رباتیک، دورههای آموزشی، مراکز آموزش مهندسی و علاقهمندان پیشرفته.
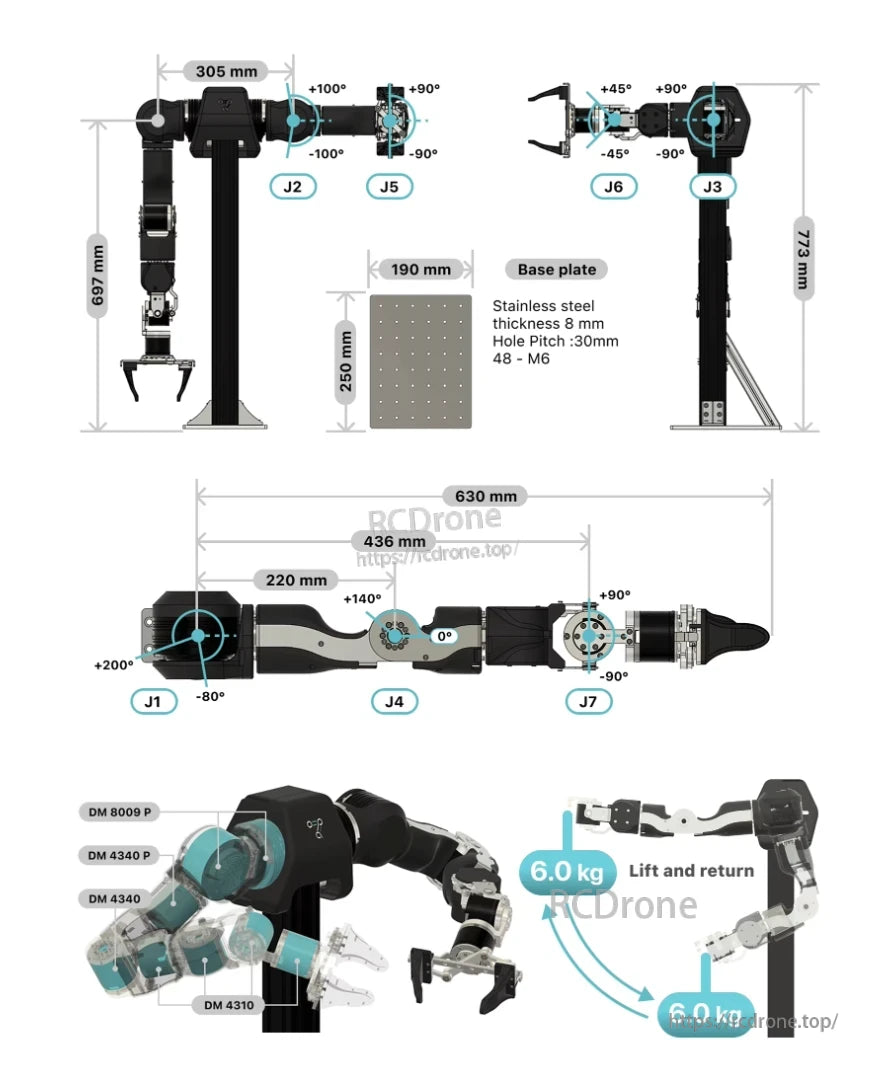
بازوی رباتیک Cereboto OpenArm 7DOF دارای هفت مفصل (J1–J7) با دامنههای زاویهای تعریفشده است. ارتفاع آن 697 میلیمتر یا 773 میلیمتر است، به 630 میلیمتر میرسد و بر روی یک صفحه پایه استیل ضدزنگ به ابعاد 190×250 میلیمتر نصب میشود—به ضخامت 8 میلیمتر با 48 سوراخ M6 که با فاصله 30 میلیمتر قرار گرفتهاند. این بازو با موتورهای DM8009P، DM4340P، DM4340 و DM4310 کار میکند و بارهای 6.0 کیلوگرمی را با دقت مدیریت میکند. طراحی شده برای استفاده صنعتی و تحقیقاتی، این بازو تعادل بین استحکام ساختاری و کنترل دقیق حرکت را برقرار میکند.

Related Collections



