







CRA-RI50-60-PRO-S یکپارچه Actuator Actuator مشترک ، 51/81/101: 1 ، 23-34 N · M Peak ، Sollow-Shaft ، 24-48 V ، Can ، 17-bit
CRA-RI50-60-PRO-S یکپارچه Actuator Actuator مشترک ، 51/81/101: 1 ، 23-34 N · M Peak ، Sollow-Shaft ، 24-48 V ، Can ، 17-bit
Ti5 Robot
در دسترس بودن پیکاپ بارگیری نشد
نمای کلی
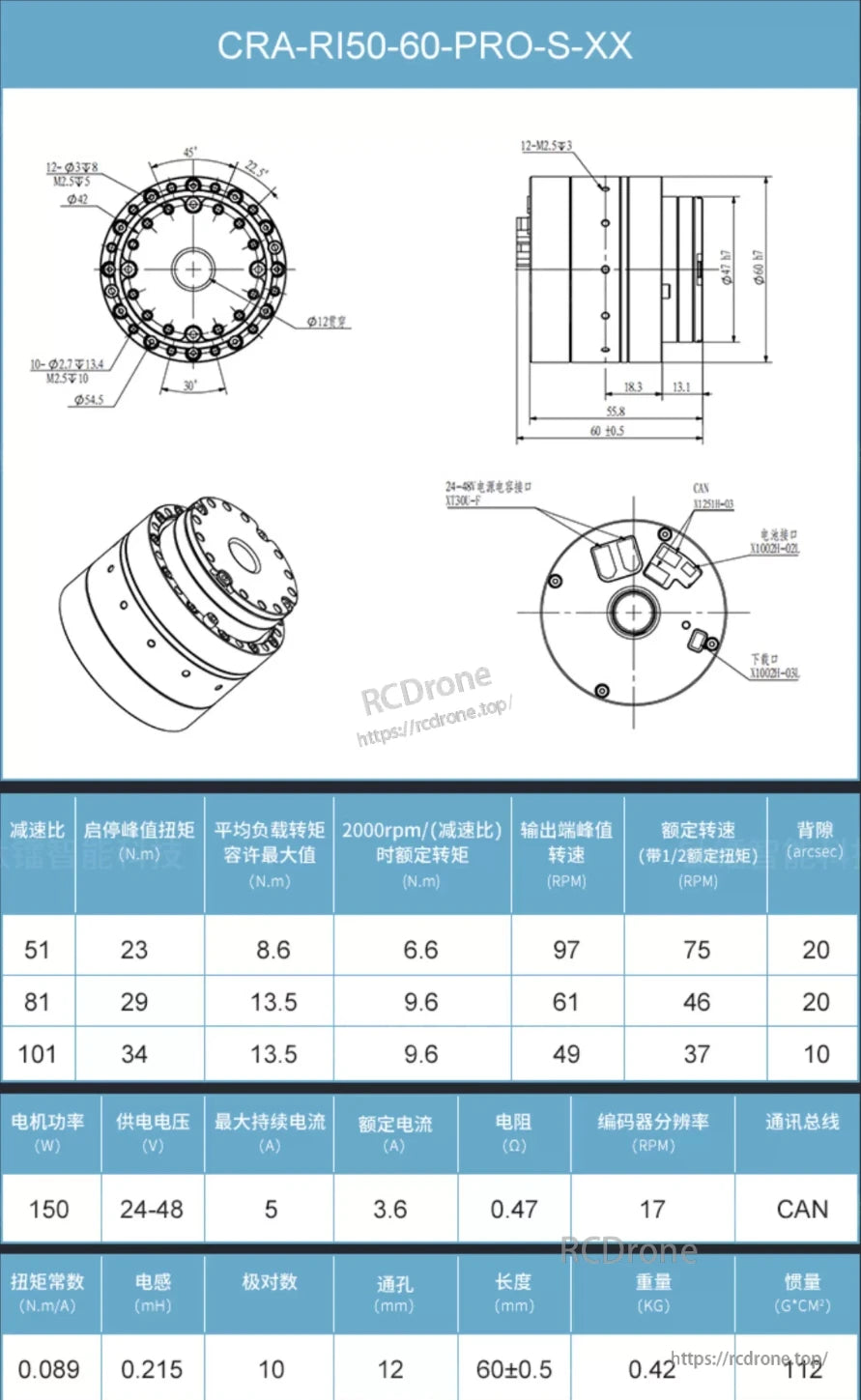
CRA-RI50-60-PRO-S-XX یک محرک مفصل ربات یکپارچه با شفت توخالی و جمع و جور برای بازوهای کوچک/سبک، رباتهای انساننما، رباتهای همکار، اسکلتهای بیرونی و مکانیزمهای پهپاد است. این ماژول یک موتور گشتاور بدون فریم، کاهنده دقیق، بازخورد دو رمزگذار و قطعات الکترونیکی محرک را در یک ماژول کلاس ۶۰ میلیمتری ترکیب میکند. سری PRO-S بر کوچکسازی، پاسخ سریع و نسبت بار به وزن بالا تأکید دارد. این ماژول RI50 سه گزینه کاهنده (۵۱/۸۱/۱۰۱:۱) با حداکثر گشتاور شروع/توقف تا ۳۴ نیوتنمتر و سرعت خروجی نامی ۷۵ دور در دقیقه (وابسته به نسبت) ارائه میدهد. رابط باس CAN و ورودی ۲۴-۴۸ ولت، ادغام آن را در سیستمهای چند محوره آسان میکند.
ویژگیهای کلیدی
-
اتصال یکپارچه کلاس ۶۰ میلیمتری با شفت توخالی (سوراخ عبوری برای کابلها/شلنگها)
-
نسبتهای کاهش: ۵۱:۱/۸۱:۱/۱۰۱:۱
-
گشتاور اوج شروع/توقف: ۲۳/۲۹/۳۴ نیوتن متر (وابسته به نسبت)
-
سرعت نامی (در ۱/۲ گشتاور نامی): تا 75 دور در دقیقه (51:1)
-
واکنش معکوس: ۲۰ آرک ثانیه (۵۱/۸۱:۱)، ۱۰ آرک ثانیه (۱۰۱:۱)
-
ورودی ۲۴ تا ۴۸ ولت DC، کلاس ۱۵۰ وات، ارتباط CAN
-
بازخورد انکودر ۱۷ بیتی، پاسخ دینامیکی سریع
-
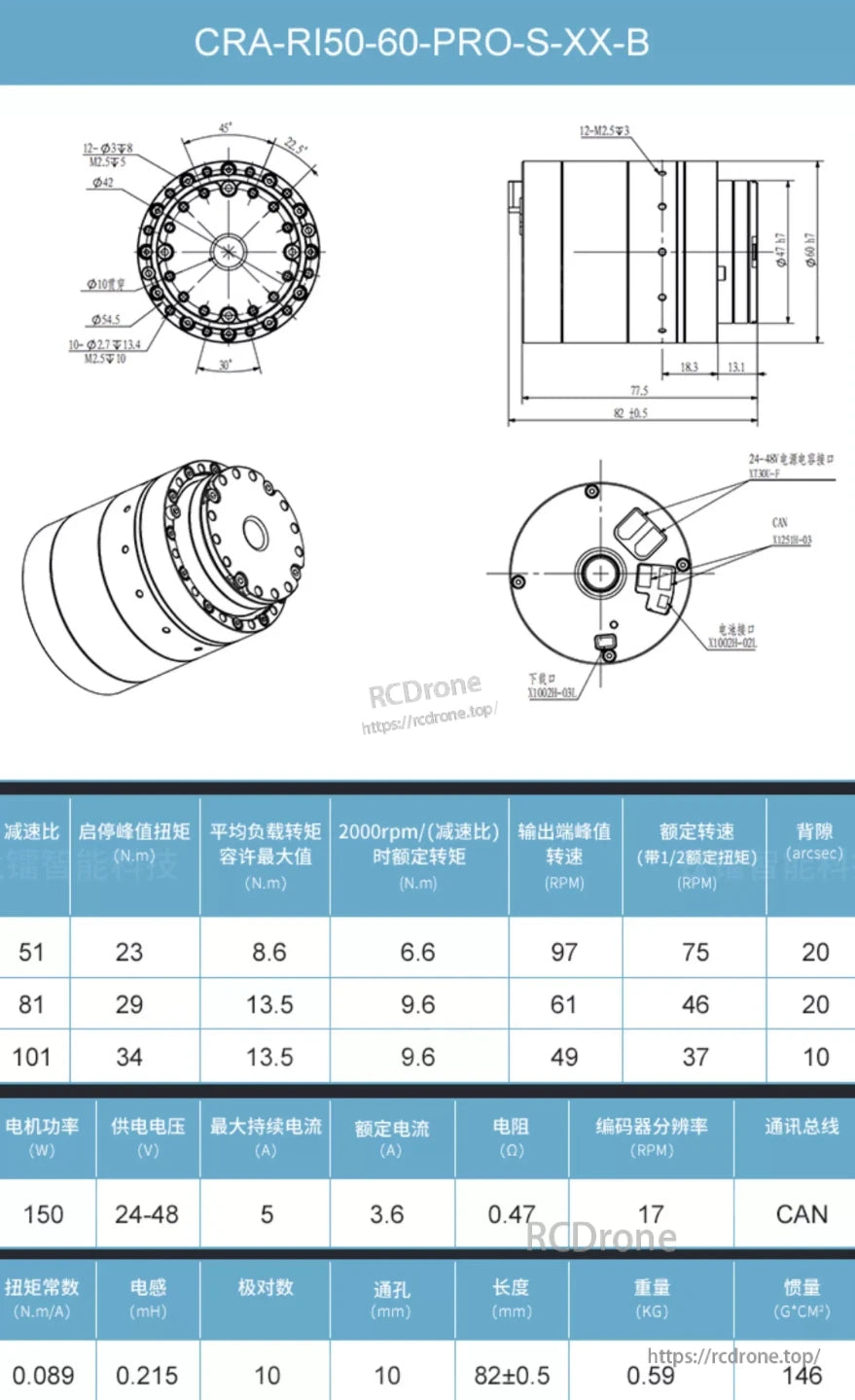
دو نسخه: استاندارد و -ب با نگه داشتن ترمز (طول/وزن بیشتر، سوراخ داخلی کوچکتر)
مشخصات
عملکرد بر اساس نسبت
| مورد | ۵۱:۱ | ۸۱:۱ | ۱۰۱:۱ |
|---|---|---|---|
| گشتاور اوج شروع/توقف (نیوتن متر) | ۲۳ | ۲۹ | ۳۴ |
| حداکثر ظرفیت گشتاور بار متوسط (نیوتن متر) | ۸.۶ | ۱۳.۵ | ۱۳.۵ |
| گشتاور نامی در 2000 دور در دقیقه/(نسبت) (نیوتن متر) | ۶.۶ | ۹.۶ | ۹.۶ |
| حداکثر سرعت خروجی (RPM) | ۹۷ | ۶۱ | ۴۹ |
| سرعت نامی، در ۱/۲ گشتاور نامی (RPM) | ۷۵ | ۴۶ | ۳۷ |
| واکنش معکوس (arcsec) | ۲۰ | ۲۰ | ۱۰ |
برق &تقویتکننده؛ کنترل (رایج)
-
قدرت موتور: ۱۵۰ وات
-
ولتاژ تغذیه: ۲۴ تا ۴۸ ولت جریان مستقیم
-
حداکثر جریان فاز پیوسته: ۵ الف
-
جریان نامی: ۳.۶ آمپر
-
مقاومت فاز: ۰.۴۷ اهم
-
گشتاور ثابت: ۰.۰۸۹ نیوتن متر بر آمپر
-
اندوکتانس: ۰.۲۱۵ میلیهانری
-
جفت قطبها: ۱۰
-
وضوح رمزگذار: ۱۷ بیتی (افزایشی)
-
گذرگاه/پروتکل: میتوان
مکانیکی
استاندارد (CRA-RI50-60-PRO-S-XX)
-
سوراخ از طریق: ۱۲ میلیمتر
-
طول: 60 ± 0.5 میلیمتر
-
جرم: ۰.۴۲ کیلوگرم
-
اینرسی روتور: ۱۱۲ گرم بر سانتیمتر مربع
با ترمز (CRA-RI50-60-PRO-S-XX-B)
-
سوراخ از طریق: ۱۰ میلیمتر
-
طول: ۸۲ ± ۰.۵ میلیمتر
-
جرم: ۰.۵۹ کیلوگرم
-
اینرسی روتور: ۱۴۶ گرم بر سانتیمتر مربع
یادداشتها: ابعاد نشان داده شده طول کلی ماژول هستند؛ مدل ترمزدار دارای یک ترمز نگهدارنده برای نگه داشتن دستگاه در حالت خاموش است.بازاریابی سری PRO-S بر کوچکسازی، پاسخ سریع و ساختار آببندیشده برای مقاومت در برابر گرد و غبار/آب تأکید دارد (هیچ درجه IP خاصی ذکر نشده است).
کاربردها
-
بازوهای رباتیک رومیزی و مشارکتی با ۴ تا ۷ درجه آزادی
-
مفاصل انساننما (شانه، آرنج، لگن، زانو، مچ پا)
-
محرکهای اسکلت بیرونی و رباتهای توانبخشی
-
رباتهای خدماتی/بازرسی، رباتهای مکانیکی متحرک
-
گیمبالها/مکانیسمهای پهپاد که به اتصالات فشرده با گشتاور بالا نیاز دارند
-
اتوماسیون صنعتی سبک و پلتفرمهای تحقیقاتی آموزشی
جزئیات
عملگر رباتیک CRA-RI50-60-PRO-S-XX با موتور ۱۵۰ وات، تغذیه ۲۴-۴۸ ولت، ارتباط CAN و نسبت دندههای چندگانه. از ویژگیهای آن میتوان به گشتاور بالا، وضوح دقیق انکودر و طراحی جمع و جور برای کاربردهای رباتیک اشاره کرد.
دوچرخه Crabtree Rio 60 Pro XX مشکی با برچسب nS و WSS041 و مجموعه دنده 1LZ Ke4l M257 شماره حلقه زنجیر 4A شماره 45 Mah #id K1/28r+85e Arcsec با چرخ دنده S 51 23 8.6 6.6، 97 75 20 81 29 13.5 9.6، 61 46 20 101 34 13.5 9.6 و 49 37 10.
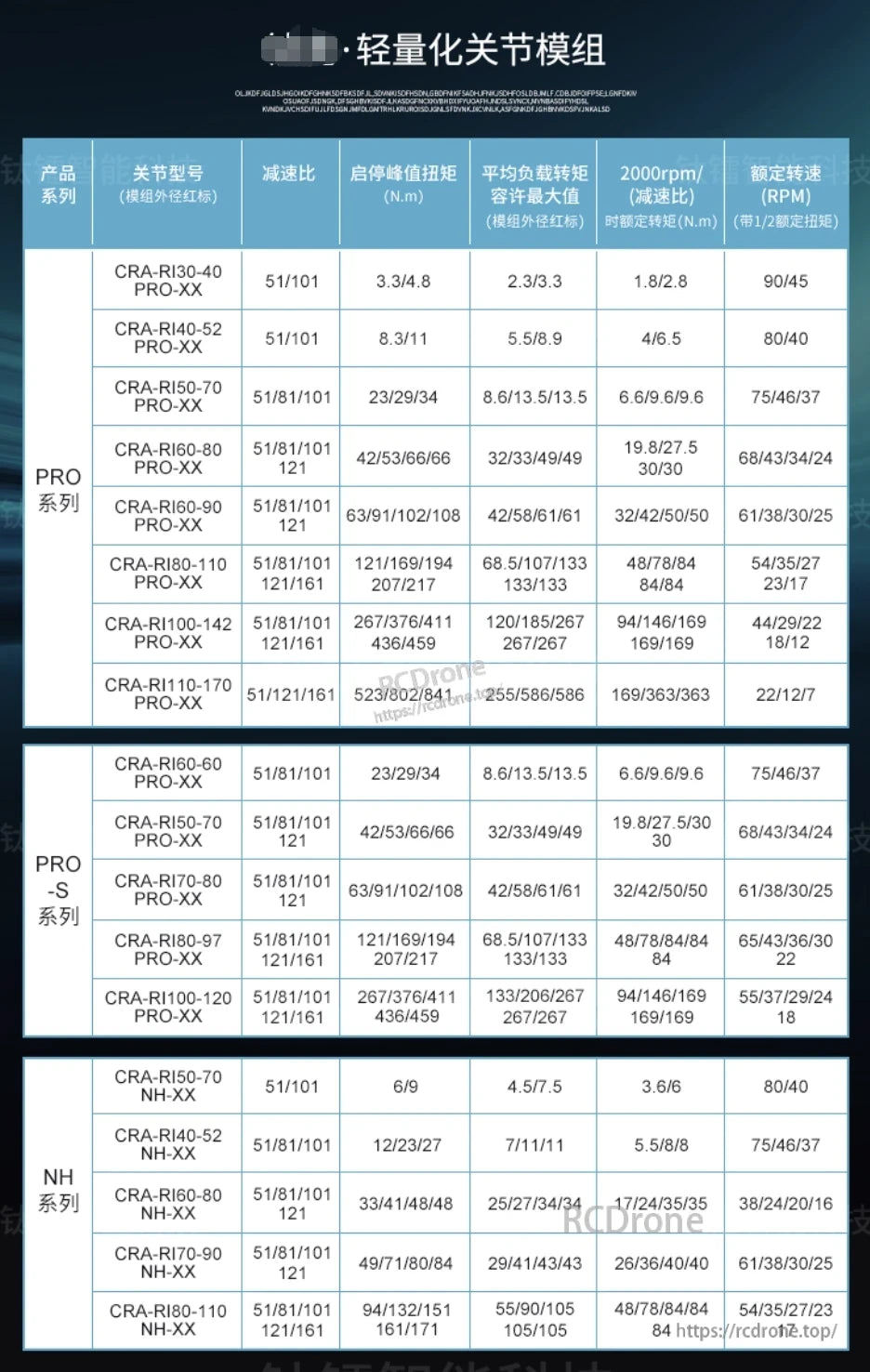
ماژولهای مفصل سبک وزن شامل سریهای PRO، PRO-S و NH با مشخصاتی شامل نسبتهای تبدیل، گشتاور اوج، ظرفیت بار، سرعت نامی و گشتاور در 2000 دور در دقیقه. مدلها از CRA-RI30-40 تا CRA-RI180-170 متغیر هستند.
Related Collections







