





محرک رباتیک CubeMars AK80-64 KV80 – گشتاور اوج ۱۲۰ نیوتنمتر، نسبت دنده ۶۴:۱، حالت MIT
محرک رباتیک CubeMars AK80-64 KV80 – گشتاور اوج ۱۲۰ نیوتنمتر، نسبت دنده ۶۴:۱، حالت MIT
CubeMars
در دسترس بودن پیکاپ بارگیری نشد
بررسی
ویژگیهای کلیدی
-
خروجی گشتاور بالا: 48Nm نامی، 120Nm گشتاور اوج
-
درایو و انکودر یکپارچه: سادهسازی طراحی سیستم
-
گیربکس سیارهای 64:1: کاهش بالا برای خروجی قدرتمند
-
حالت کنترل MIT: کنترل نرم موقعیت، سرعت و شتاب
-
پشتیبانی از ولتاژ وسیع: سازگار با سیستمهای 24V یا 48V (6–12S LiPo)
-
جمع و جور و سبک: تنها 850 گرم، نسبت گشتاور به وزن بالا
-
ارتباطات: CAN و UART با کانکتور برق XT30PW-M
-
صدای کم: ≤60 dB در فاصله 65 سانتیمتری
مشخصات
| کاربرد | ربات پا دار، اسکلت بیرونی، AGV | گشتاور اوج (Nm) | 120 |
| روش رانندگی | FOC | جریان اوج (ADC) | 19 |
| دمای محیط عملیاتی | -20℃~50℃ | Kv (rpm/V) | 80 |
| نوع سیم پیچی | دلتا | Kt (Nm/A) | 0.136 |
| کلاس عایق | H | Ke (V/krpm) | 13.7 |
| عایق ولتاژ بالا | 1000V 5mA/2s | مقاومت فاز به فاز (mΩ) | 220 |
| مقاومت عایق | 1000V10MΩ | اندوکتانس فاز به فاز (μH) | 133.5 |
| فاز | سه فاز | اینرسی (gcm²) | 564.5 |
| جفت قطب | 21 | Km (Nm/√W) | 0.29 |
| نسبت کاهش | 64:1 | ثابت زمان مکانیکی (ms) | 0.67 |
| درایو معکوس (Nm) | 4.7 | ثابت زمان الکتریکی (ms) | 0.61 |
| بکلاش (°) | 0.18 | وزن (گرم) | 850 |
| سنسور دما | NTC MF51B 103F3950 | نسبت حداکثر گشتاور به وزن (Nm/kg) | 141.2 |
| نویز دسیبل در فاصله 65 سانتیمتری از موتور | 60 | کانکتور CAN | A1257WR-S-4P |
| رتبهبندی بار پایه (dyn. C ) N | 2000 | کانکتور UART | A1257WR-S-3P |
| رتبه بار پایه (stat.C0) N | 2520 | کانکتور برق | XT30PW-M |
| ولتاژ نامی (V) | 24/48 | نوع انکودر حلقه داخلی | انکودر مغناطیسی |
| گشتاور نامی (Nm) | 48 | رزولوشن انکودر حلقه داخلی | 14bit |
| سرعت نامی (rpm) | 23/48 | نوع انکودر حلقه خارجی | - |
| جریان نامی (ADC) | 7 | رزولوشن انکودر حلقه خارجی | - |
| تعداد انکودر | 1 |
کاربردها
-
رباتهای پا دار: حرکت انساننما و چهارپای
اکسوسکلتونها: رباتیکهای کمکی و توانبخشی
-
AGVs: کنترل دقیق موتور در وسایل نقلیه هدایتشده خودکار
-
بازوهای رباتیک: کاربردهای صنعتی و همکاری که نیاز به گشتاور و دقت بالا دارند
جزئیات
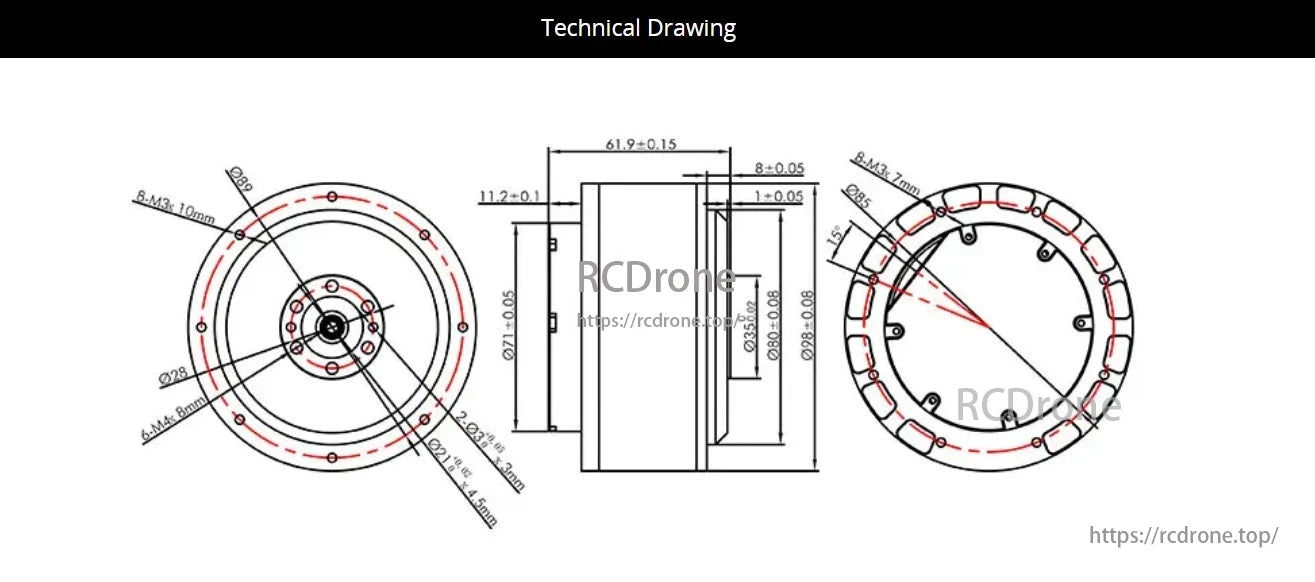
نقشه فنی ربات CubeMars AK80 با ابعاد و مشخصات.
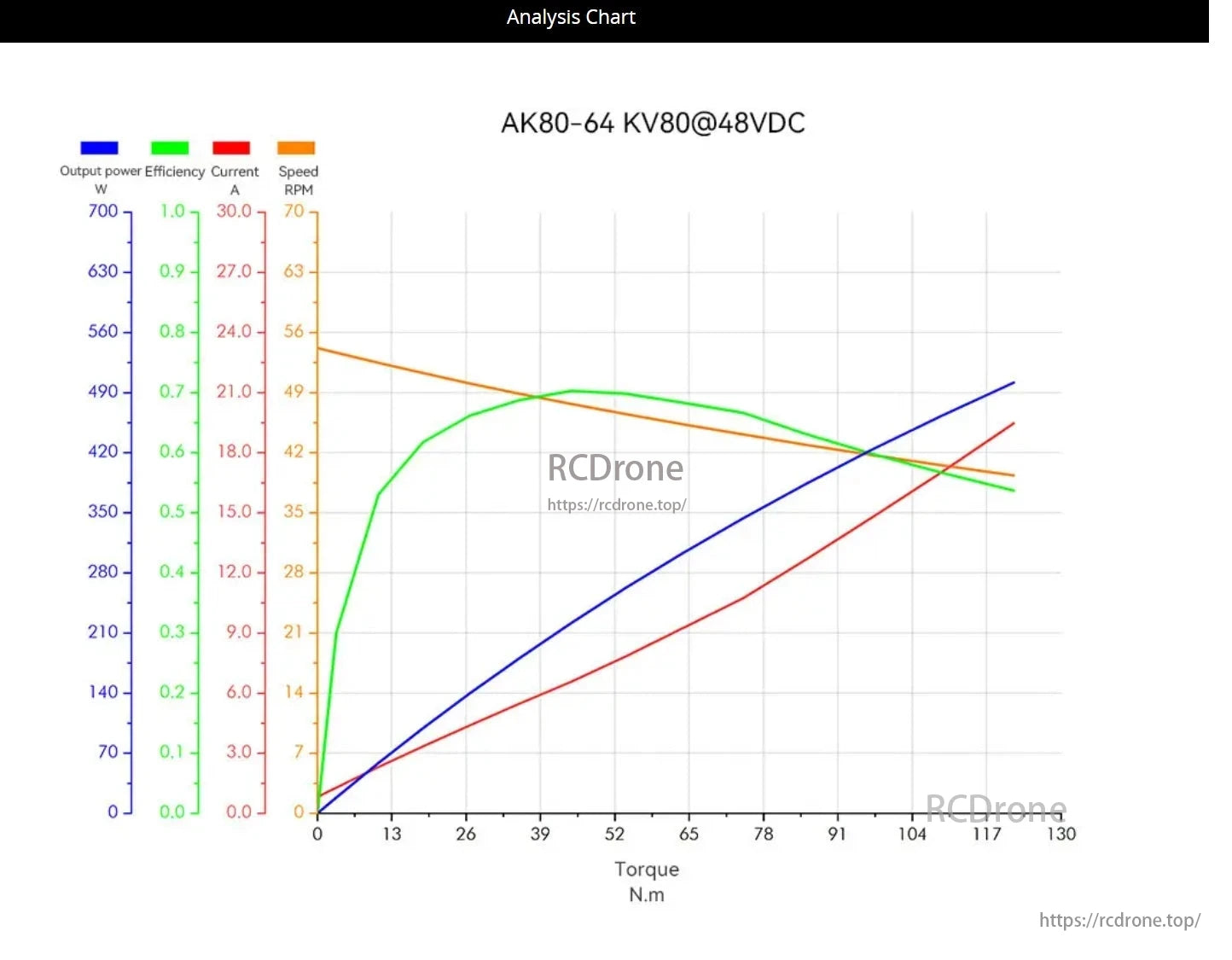
نمودار تحلیل برای CubeMars AK80-64 KV80@48VDC. Dispکارایی توان خروجی، جریان و سرعت را در برابر گشتاور در N.m نشان میدهد. کارایی در 0.7 در نزدیکی 52 N.m به اوج میرسد. جریان بهطور خطی با گشتاور افزایش مییابد. سرعت با افزایش گشتاور کاهش مییابد و از 56 RPM شروع میشود. توان خروجی بهطور پیوسته با گشتاور افزایش مییابد. نمودار از خطوط آبی، سبز، قرمز و نارنجی برای وضوح بیشتر استفاده میکند و محورهای آن با وات، آمپر، RPM و N.m برچسبگذاری شدهاند. دادهها ویژگیهای عملکرد موتور را تحت بارهای مختلف نشان میدهند.

CubeMars AK80-64KV80: ماژول دینامیک دو در یک، با ادغام بالا برای رباتیک.

موتور AK80-64KV80: ادغام بالا، فوقالعاده سبک، کارآمد، طراحی دینامیک.

عملکرد کمصدا، قدرت قوی. گشتاور کوگینگ پایینتر، عملکرد روان، دقت بالا، کنترل با دقت 0.1°.
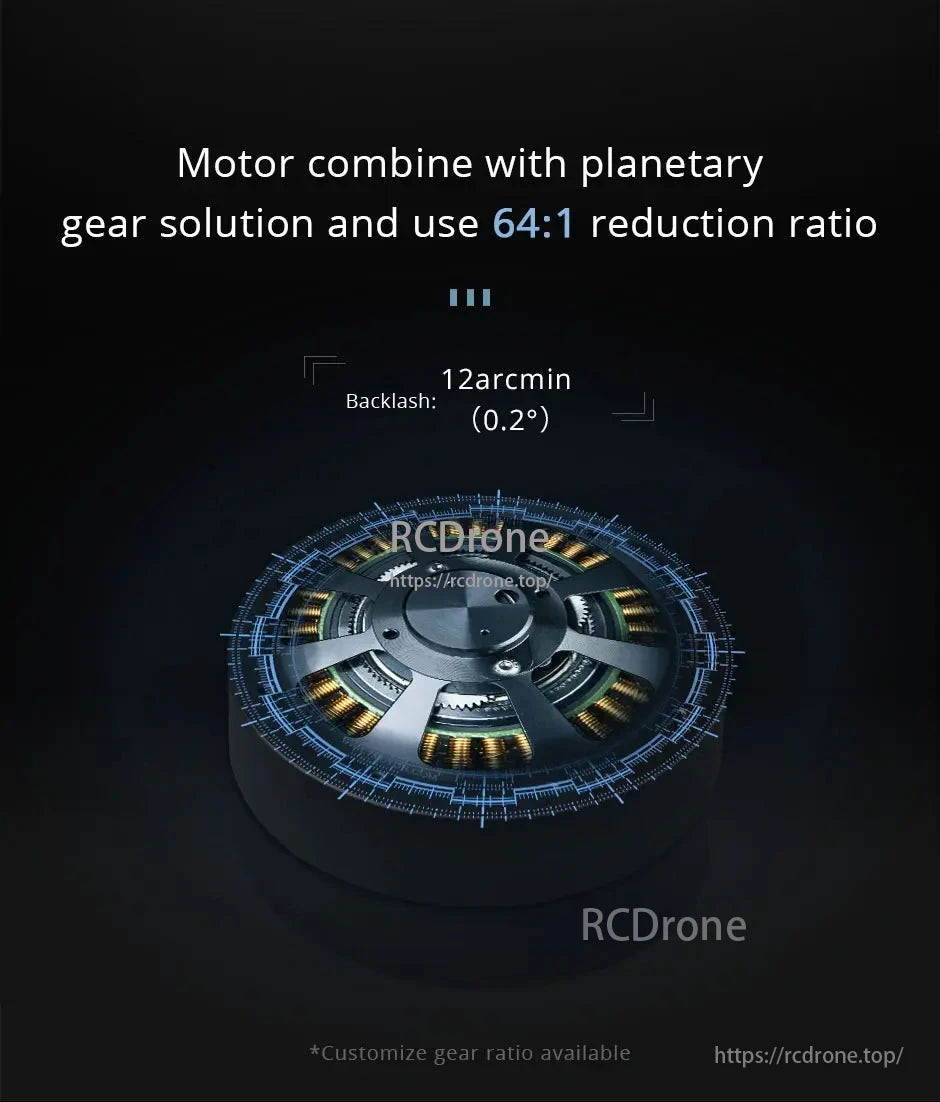
موتور با دنده سیارهای، نسبت 64:1، با پسگرد 12arcmin.
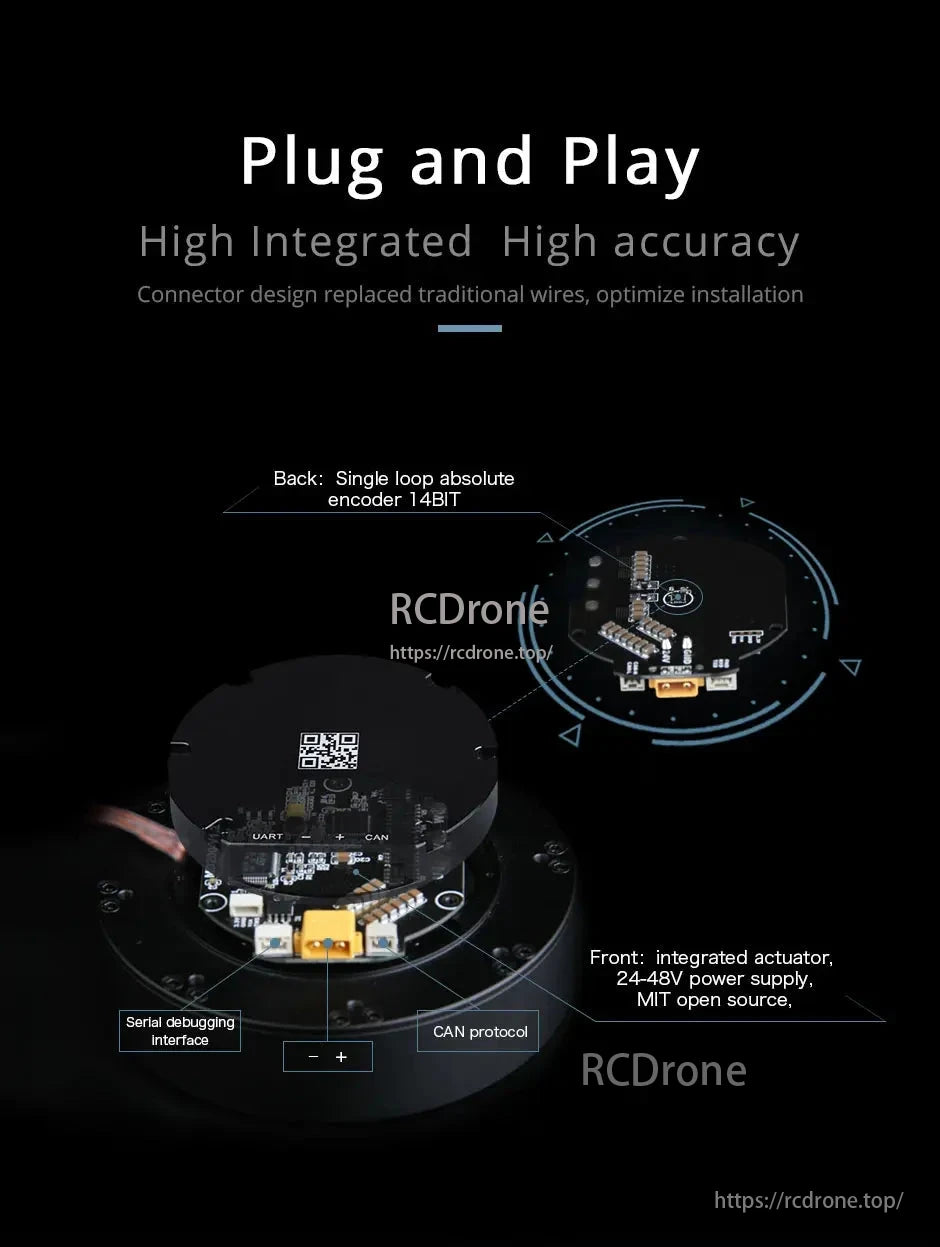
ماژول ربات دقیق و با یکپارچگی بالا، با قابلیت اتصال و استفاده آسان، انکودر حلقهتک، عملگر یکپارچه، منبع تغذیه 24-48V، پروتکل CAN و اشکالزدایی سری.

Related Collections





