





موتور CubeMars R80 KV110 ولتاژ ۴۸ ولت، سه فاز FOC با سنسور هال، مناسب برای اسکلت بیرونی و رباتیک
موتور CubeMars R80 KV110 ولتاژ ۴۸ ولت، سه فاز FOC با سنسور هال، مناسب برای اسکلت بیرونی و رباتیک
CubeMars
در دسترس بودن پیکاپ بارگیری نشد
بررسی
موتور CubeMars R80 KV110 یک موتور 3 فاز است که برای کاربردهای درایو اسکلت بیرونی و رباتیک طراحی شده است، با حسگرهای هال یکپارچه و پشتیبانی از کنترل میدانمحور (FOC). این موتور دارای طراحی خاصی برای دفع حرارت و یک رابط به سبک کانکتور است که نصب را سادهتر میکند.
ویژگیهای کلیدی
- حسگرهای هال یکپارچه
- انحراف دقت زاویه الکتریکی: ±10°
- طراحی خاص دفع حرارت (پایه فوقالعاده نازک & پد سیلیکونی با هدایت حرارتی بالا؛ کاهش طول کلی برای بهبود دفع حرارت)
- طراحی سوراخ الگو بر روی زنگ برای نصب گیربکس (گیربکس هارمونیک، فلنج، یا انواع دیگر گیربکسها)
- طراحی کانکتور برای نصب آسانتر (جایگزین سیمهای سنتی)
- نمودار عملکرد موتور تحلیلی ارائه شده (سرعت در مقابل گشتاور در 48V؛ نواحی غیرعملیاتی / عملیات کوتاهمدت / عملیات مداوم)
مشخصات
| کاربرد | اسکلت بیرونی |
| روش رانندگی | FOC |
| دمای محیط عملیاتی | -20℃~50℃ |
| نوع سیمپیچی | دلتا |
| کلاس عایق | H |
| عایق ولتاژ بالا | 1000V 5mA/2s |
| مقاومت عایق | 1000V10MΩ |
| فاز | 3 |
| جفت قطبها | 21 |
| ولتاژ نامی (V) | 48 |
| سرعت بدون بار (rpm) | 4320 |
| گشتاور نامی (Nm) | 1.3 |
| سرعت نامی (دور در دقیقه) | 3580 |
| جریان نامی (آمپر مستقیم) | 12.3 |
| گشتاور اوج (نیوتن متر) | 4 |
| جریان اوج (آمپر مستقیم) | 38.6 |
| Kv (دور در دقیقه/ولت) | 90 |
| Kt (نیوتن متر/آمپر) | 0.107 |
| Ke (ولت/هزار دور در دقیقه) | 10.58 |
| مقاومت فاز به فاز (میلیاهم) | 125 |
| اندوکتانس فاز به فاز (میکروهنری) | 87 |
| اینرسی (گرم سانتیمتر²) | 759.98 |
| Km (نیوتن متر/√وات) | 0.3026 |
| ثابت زمانی مکانیکی (میلیثانیه) | 0.83 |
| ثابت زمانی الکتریکی (میلیثانیه) | 0.70 |
| وزن (گرم) | 354 |
| نسبت حداکثر گشتاور به وزن (Nm/kg) | 11.3 |
| فاز موتور U V W | نقشه مهندسی مرجع |
| پورت حسگر هال | VCC, GND, Hu, Hv, HW (نقشه مهندسی مرجع) |
| مکاتبات | Hu-U; Hv-V; Hw-W |
کاربردها
- رباتهای انساننما
- بازوهای رباتیک
- اسکلتهای خارجی
- رباتهای چهارپا
- وسایل نقلیه AGV
- رباتهای ARU
راهنماها / مستندات
برای سوالات مربوط به انتخاب سیمکشی/درایور یا کمک در مستندات، با پشتیبانی از طریق https://rcdrone.top/ یا ایمیل [email protected].
یادداشت از جدول ارائه شده: تمام دادهها فقط برای مقاصد اطلاعاتی است | ممکن است بدون اطلاع قبلی تغییر کند.
جزئیات

CubeMars R80 KV110 برای مفاصل رباتیک فشرده و درایوهای اسکلت بیرونی طراحی شده است، با یک فرم فاکتور اکچوئیتور-سبک و کمارتفاع.

سنسورهای هال یکپارچه بازخورد موقعیت روتور را برای کنترل FOC پایدار فراهم میکنند، با دقت انحراف زاویه الکتریکی که به ±10° ارزیابی شده است.

یک طراحی خاص برای دفع حرارت از یک پایه فوقالعاده نازک و پد سیلیکونی با هدایت حرارتی بالا استفاده میکند تا به مدیریت دما در ساختهای فشرده کمک کند.

سوراخهای نصب الگو بر روی زنگ، اتصال یک جعبه دنده هارمونیک، فلنج یا سایر انواع جعبه دنده را ساده میکند.
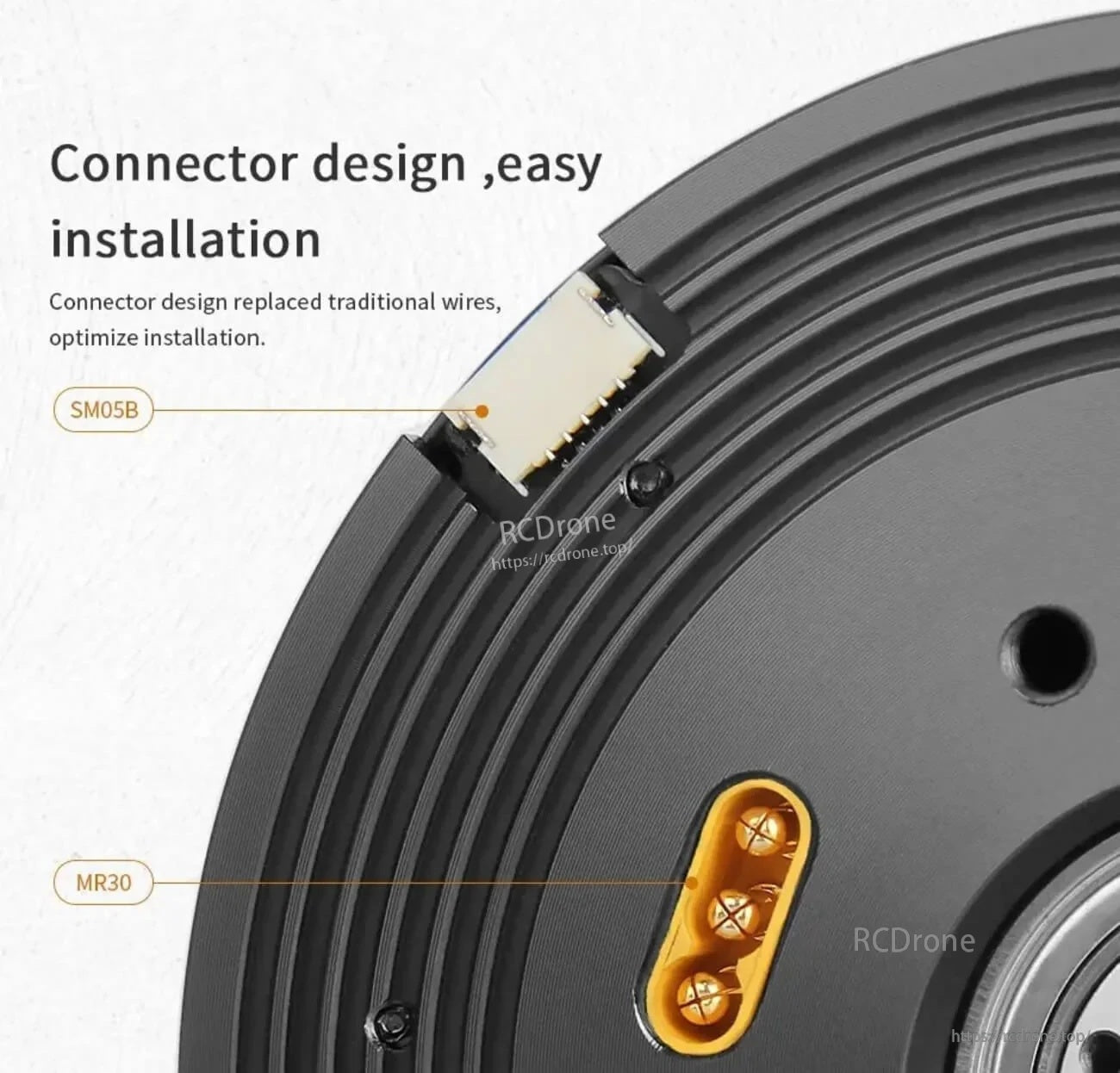
سیمکشی به سبک کانکتور جایگزین رشتههای آزاد سنتی میشود تا نصب تمیزتر و سریعتری برای اتصالات برق و حسگرها فراهم کند.
طراحی الکترومغناطیسی بهینه شده هدفش کاهش گشتاور چسبندگی و کاهش اینرسی روتور برای کنترل حرکتی روانتر است.

طراحی شده برای رباتهای پا دار با بار سنگین و سایر کاربردهای مفصل با گشتاور بالا که در آن خروجی پایدار اهمیت دارد.

نمودار عملکرد سرعت در مقابل گشتاور 48V به انتخاب یک محدوده ایمن و مداوم کمک میکند و قابلیت اوج کوتاهمدت را درک میکند.
Related Collections





