




موتور گشتاور بدون قاب CubeMars RI60 KV120 | 0.57 نیوتنمتر، 120KV، 48 ولت BLDC برای ربات همکاری و اسکلت بیرونی
موتور گشتاور بدون قاب CubeMars RI60 KV120 | 0.57 نیوتنمتر، 120KV، 48 ولت BLDC برای ربات همکاری و اسکلت بیرونی
CubeMars
در دسترس بودن پیکاپ بارگیری نشد
بررسی
موتور گشتاور CubeMars RI60 KV120 بدون قاب برای برنامههای رباتیک فشرده و با عملکرد بالا طراحی شده است. این موتور از ولتاژهای عملیاتی 24V/36V/48V پشتیبانی میکند و موتور BLDC بدون قاب آن چگالی گشتاور بالا، حرکت نرم با کمترین لرزش و دقت کنترل 0.01° را ارائه میدهد. با قطر خارجی فشرده Φ60mm و وزن تنها 155.9g، این موتور برای بازوهای رباتیک همکار، اسکلتهای خارجی و مفاصل رباتیک با محدودیتهای فضایی مناسب است.
این موتور دارای استاتور دستپیچیده برای بهینهسازی ضریب پرشدن مس، مغناطیسهای دائمی منحنی برای پاسخ مؤثر سینوسی BEMF و گزینههایی برای ادغام حسگر هال و انکودر است.این محصول از کنترل میدانمحور (FOC) پشتیبانی میکند، در دماهای -20°C تا 50°C بهطور قابلاعتمادی عمل میکند و میتواند تا 1.63 Nm گشتاور اوج را تحمل کند. نسخه روتور افزایشیافته دقت حسگر هال را با افزایش دامنه تشخیص به میزان 2 میلیمتر بهبود میبخشد.
ویژگیهای کلیدی
-
طراحی BLDC بدون قاب – بدون محفظه خارجی، ایدهآل برای نصبهای توکار
-
چگالی گشتاور بالا – حداکثر نسبت گشتاور به وزن 10.46 Nm/kg
-
کنترل دقیق – سازگار با انکودرهای با وضوح بالا، از 0 پشتیبانی میکند.01° موقعیتیابی
-
گشتاور کم کوگینگ – عملکرد روان، کاهش لرزش و صدا
-
مقاوم در برابر دما – کارکرد در دماهای محیطی از -20°C تا 50°C
-
رابطهای کنترل متعدد – پشتیبانی از بازخورد انکودر و سنسور هال
-
استاتور دستپیچیده – پرشدگی عالی مس، 0.5mm فاصله لبه برای مونتاژ آسان
-
نسخه روتور اختیاری – +2mm ارتفاع روتور تراز سنسور هال را بهبود میبخشد
مشخصات فنی
کاربرد و پیکربندی
| پارامتر | مقدار |
|---|---|
| کاربرد | بازوی رباتیک / اسکلت بیرونی |
| روش رانندگی | FOC |
| فاز | 3 فاز |
| نوع سیمپیچی | دلتا |
| جفت قطبها | 14 |
| کلاس عایق | C |
| ولتاژ عایق | 500V 5mA/2s |
| مقاومت عایق | 500V 10MΩ |
| دمای عملیاتی | -20℃ ~ 50℃ |
ویژگیهای الکتریکی
| پارامتر | مقدار |
|---|---|
| ولتاژ نامی (V) | 24 / 36 / 48 |
| سرعت بدون بار (rpm) | 2532 / 3798 / 5064 |
| سرعت نامی (rpm) | 1440 / 2320 / 3190 |
| گشتاور نامی (Nm) | 0.57 |
| گشتاور اوج (Nm) | 1.63 |
| جریان نامی (ADC) | 5.6 |
| جریان اوج (ADC) | 16.8 |
| Kv (rpm/V) | 120 |
| Ke (V/krpm) | 9.03 |
| Kt (Nm/A) | 0.100 |
| مقاومت فاز (میلیاهم) | 900 |
| اندوکتانس فاز (میکروهنری) | 877.5 |
| اینرسی (گرم·سانتیمتر²) | 33.05 |
| Km (نیوتنمتر/√وات) | 0.1054 |
| زمان ثابت مکانیکی (میلیثانیه) | 0.3 |
| زمان ثابت الکتریکی (میلیثانیه) | 0.98 |
| وزن (گرم) | 155.9 |
| نسبت گشتاور به وزن | 10.46 نیوتن متر بر کیلوگرم |
گزینههای انکودر و سنسور هال
-
با سنسور هال: حسگر روتور بهبود یافته، توصیه شده برای تشخیص موقعیت با دقت بالا
-
بدون سنسور هال: طراحی فشرده برای محیطهای محدود
-
انکودرهای پشتیبانی شده: رنیشاو، سیک، سایر انکودرهای با دقت بالا (0.01° دقت)
ابعاد مکانیکی
| نسخه | قطر خارجی | قطر داخلی | ارتفاع روتور | حداکثر ضخامت |
|---|---|---|---|---|
| بدون هال | Ø60 mm | Ø30 mm | 15 mm | 21 mm (حداکثر) |
| با هال | Ø60 mm | Ø30 mm | 15 mm | 23 mm (حداکثر) |
به نقشههای فنی برای دقتهای دقیق و الگوهای سوراخهای نصب مراجعه کنید.
منحنی عملکرد
آزمایش شده در 24VDC:
-
بیشینه کارایی در ~0.3 Nm
-
قدرت خروجی اوج >125W در ~1.1 Nm
-
حداکثر سرعت ~2500 RPM
-
پاسخ جریان پایدار در محدوده گشتاور
اطلاعات سیمکشی و کانکتور
| سیم | رنگ + اندازه |
|---|---|
| U | مشکی + سیلیکون 18# |
| V | زرد + سیلیکون 18# |
| W | قرمز + سیلیکون 18# |
| Hu | آبی + سیلیکون 30# |
| Hv | سبز + سیلیکون 30# |
| Hw | زرد + سیلیکون 30# |
| VCC | قرمز + سیلیکون 30# |
| GND | مشکی + سیلیکون 30# |
نقشه سیمکشی:
Hu-U، Hv-V، Hw-W
دانلودهای راهنما
کاربردها
-
بازوهای رباتیک همکاری
-
مفاصل اسکلت بیرونی
-
رباتهای پا دار و چهارپا
-
رباتیک پزشکی دقیق
-
ماژولهای سروو جاسازی شده
جزئیات
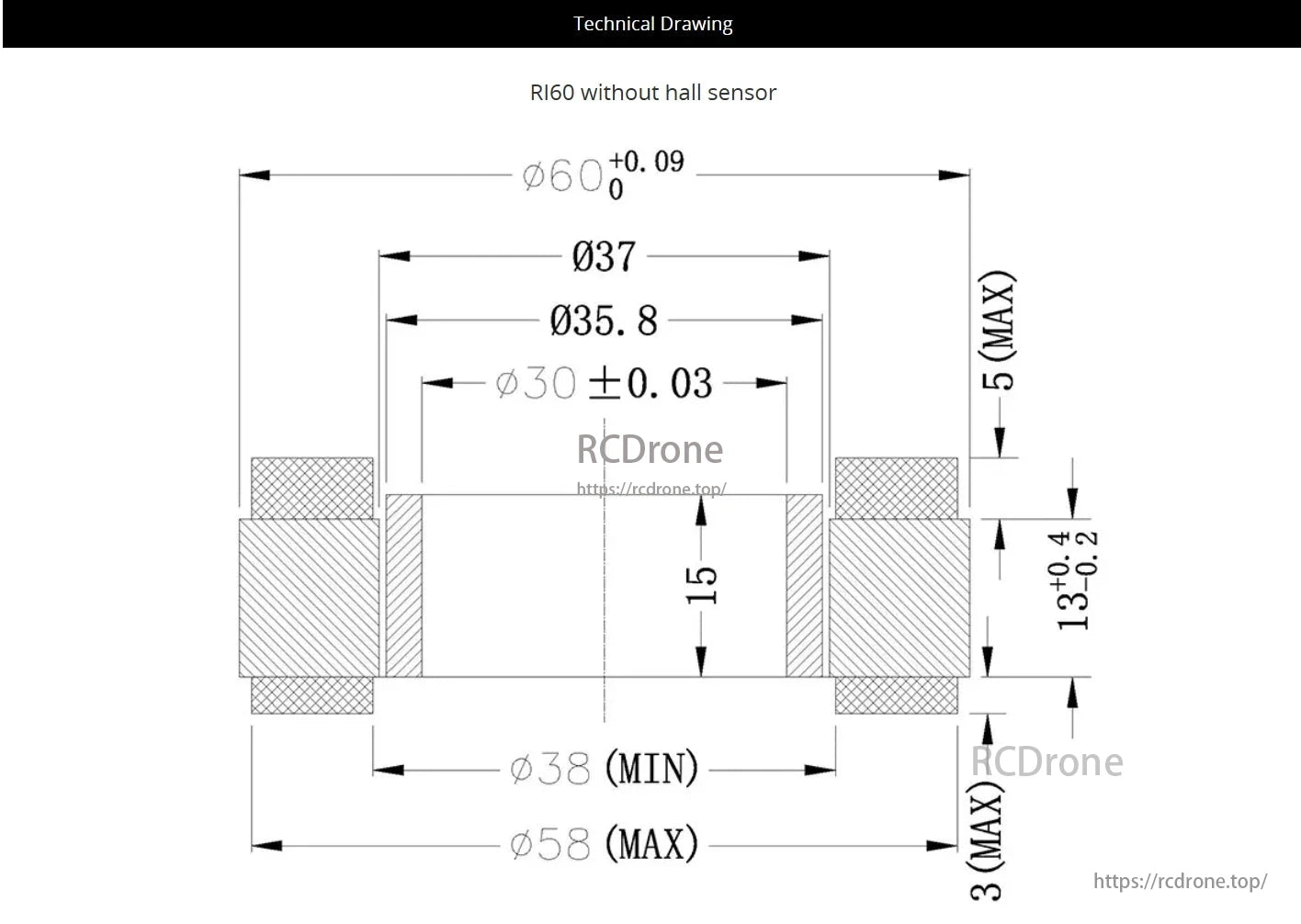
CubeMars ابعاد موتور RI60: Ø60، Ø37، Ø35.8، Ø30، Ø38 (حداقل)، Ø58 (حداکثر)، 15 طول، 5 حداکثر ارتفاع، 13 ±0.4 عرض.
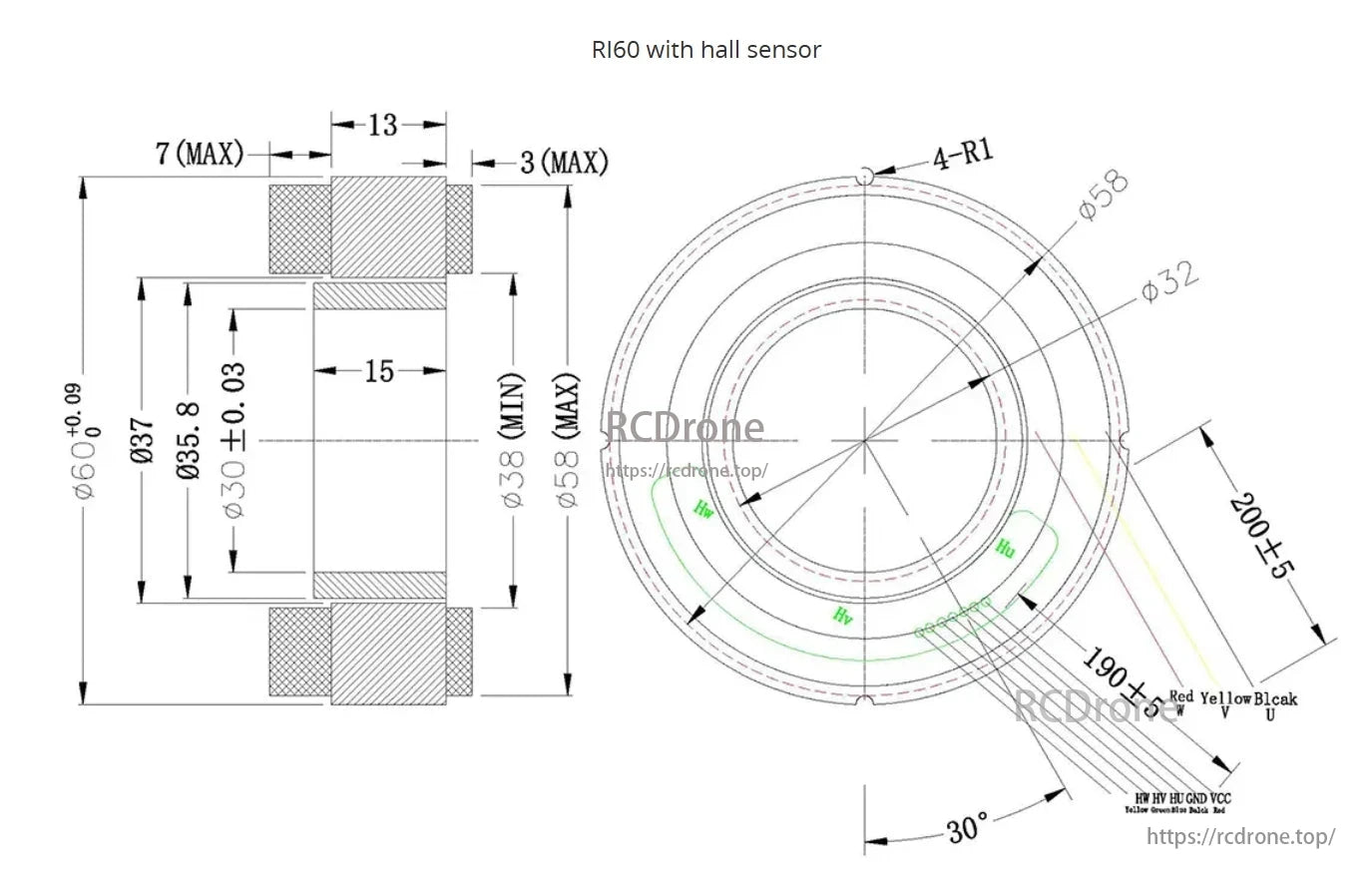
موتور CubeMars RI60 با سنسور هال. ابعاد: قطر 60 میلیمتر، طول 200 میلیمتر. دارای نشانهگذاریهای 4-R1، φ58، φ32 و زاویه 30°. شامل برچسبهای HW، HV، HU.
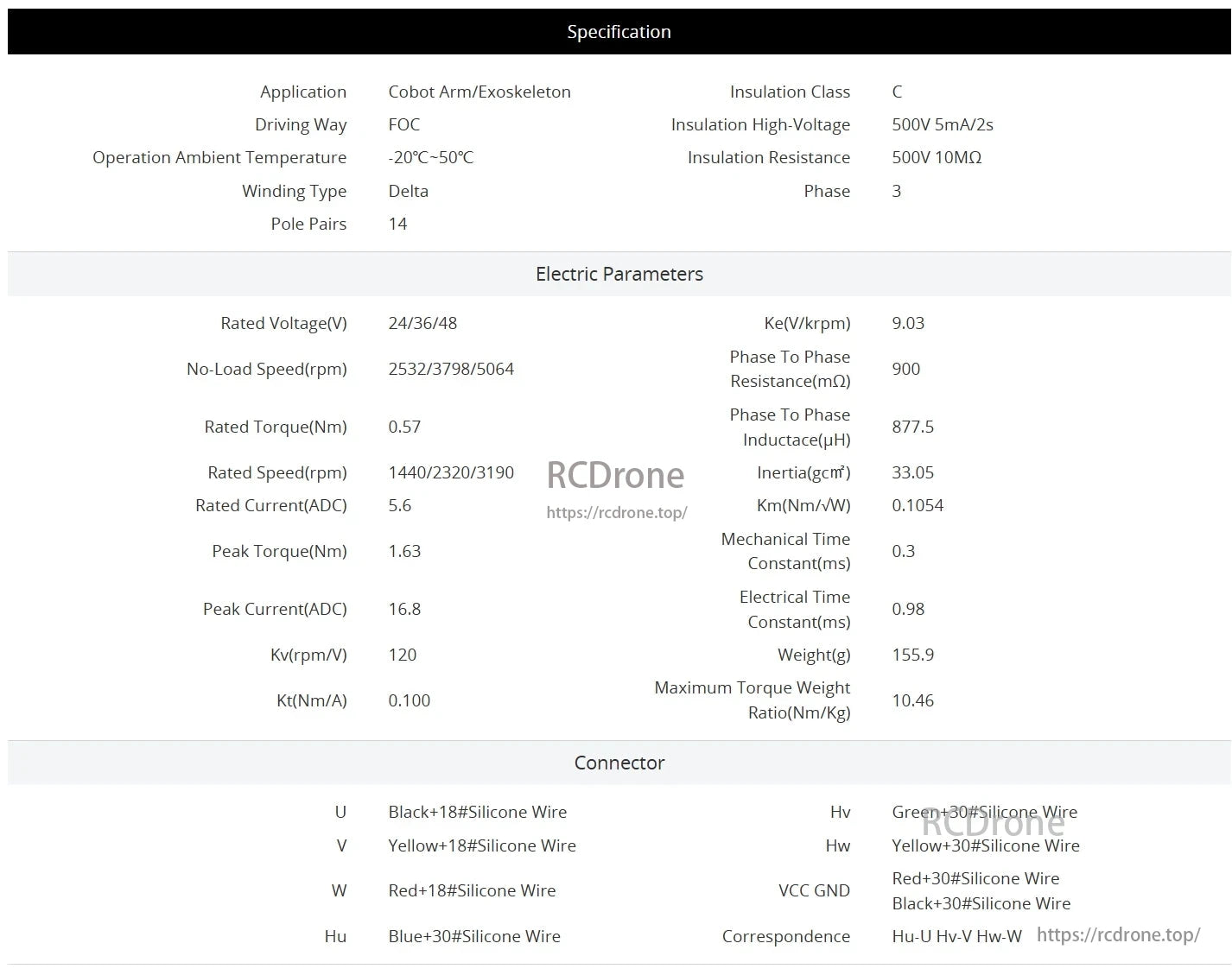
موتور CubeMars RI60: کاربرد در بازوی رباتیک/اسکلت بیرونی، رانش FOC، عملکرد در دمای -20°C تا 50°C، 14 جفت قطب. ولتاژ نامی 24/36/48V، سرعت بدون بار 2532/3798/5064 دور در دقیقه، گشتاور نامی 0.57Nm، گشتاور اوج 1.63Nm.
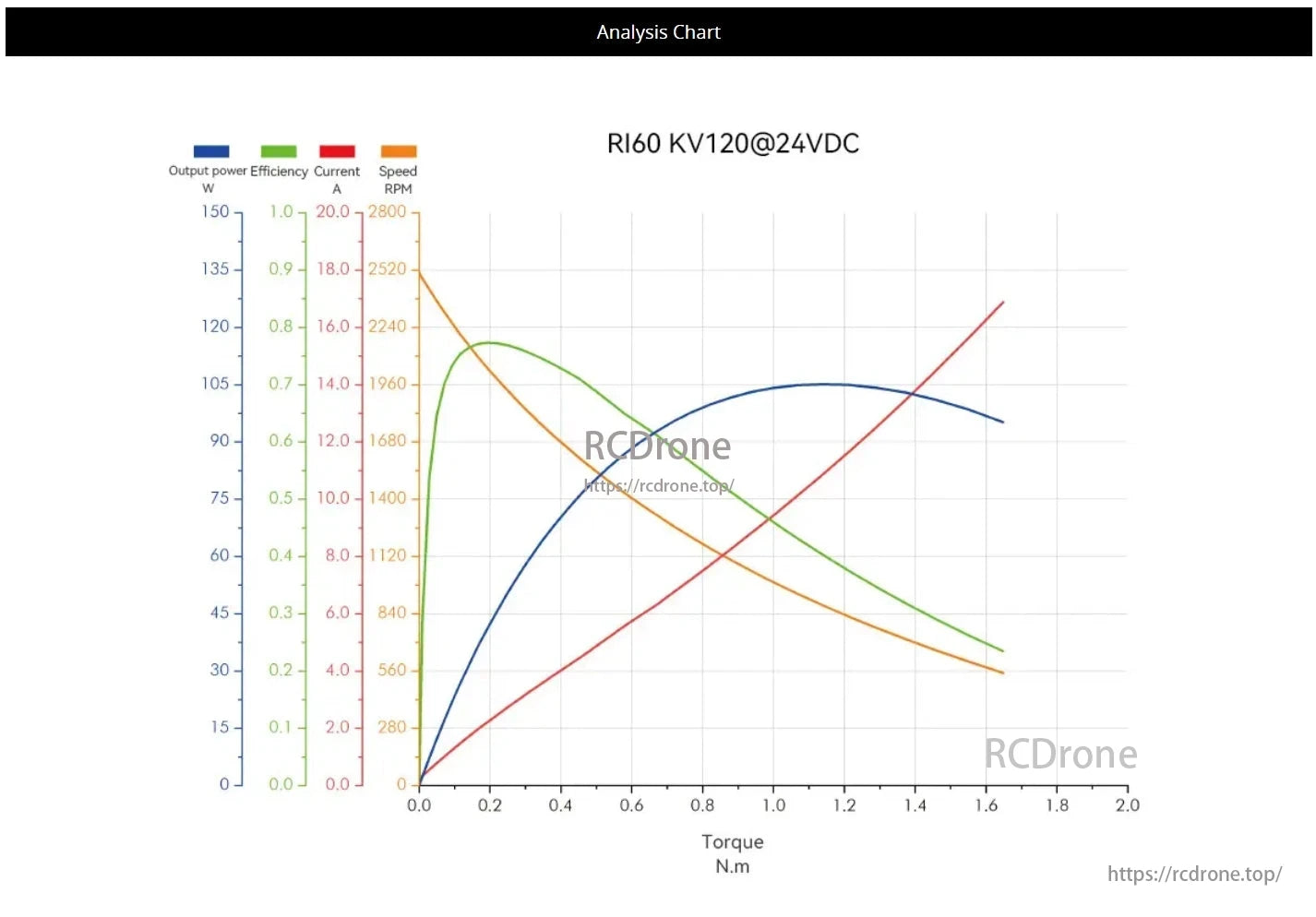
نمودار تحلیل موتور CubeMars RI60 در KV120@24VDC. Dispتوان خروجی، کارایی، جریان و سرعت را در برابر گشتاور نشان میدهد. کارایی در نزدیکی 0.2 N.m به اوج میرسد، در حالی که سرعت با افزایش گشتاور کاهش مییابد.
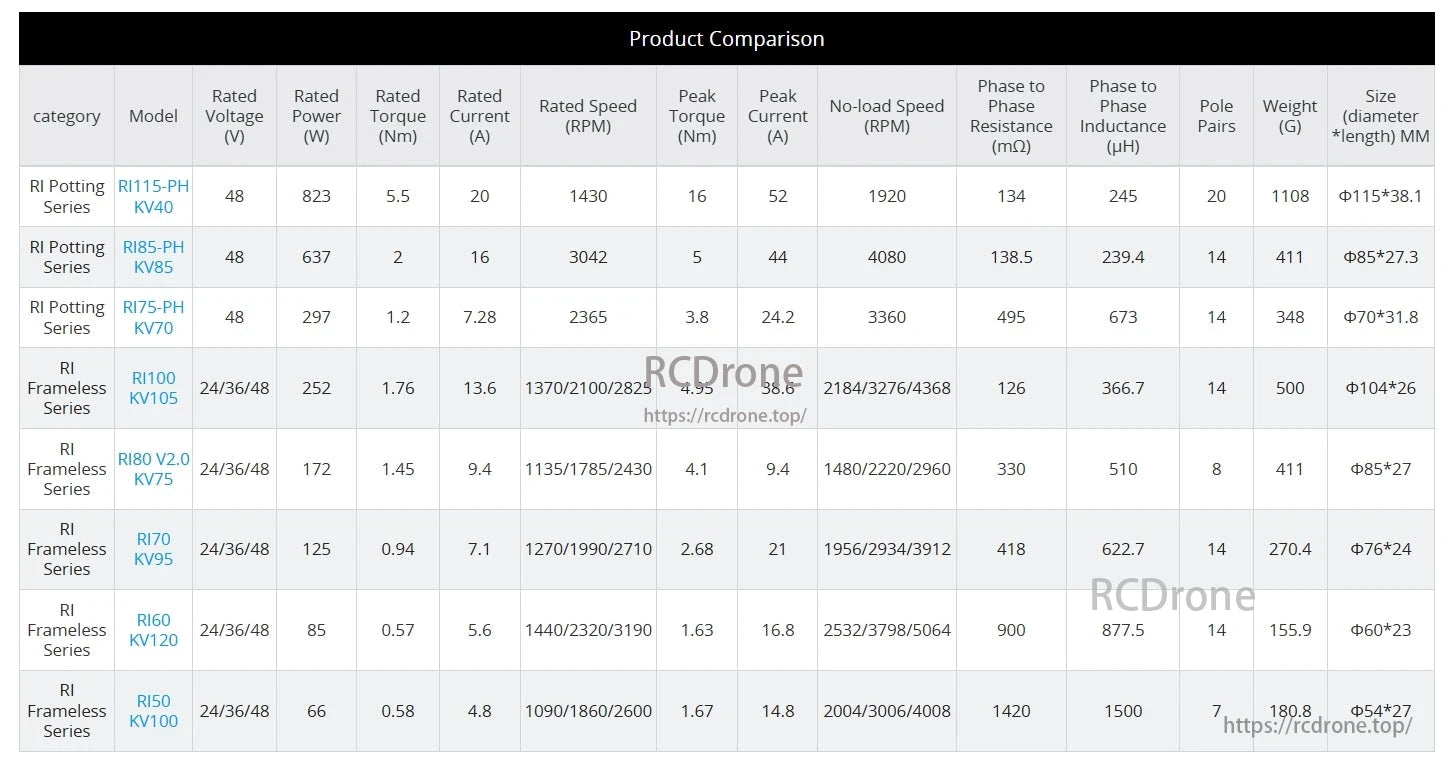
موتور CubeMars RI60 KV120: 24/36/48V، 85W، گشتاور 0.57Nm، جریان 5.6A، سرعت 1440/2320/3190 دور در دقیقه، گشتاور اوج 1.63Nm، جریان اوج 16.8A، مقاومت 900mΩ، اندوکتانس 877.5µH، 14 جفت قطب، وزن 155.9g، اندازه φ60*23mm.

موتور CubeMars RI60: گشتاور کوگینگ پایین، عملکرد روان، صدای کم، دینامیک قوی.

استاتور دستپیچیده با فاصله 0.5 میلیمتر برای عملکرد بهینه.

مغناطیس دائمی منحنی برای طراحی موتور BEMF Sinus، که کنترل آسان را تضمین میکند.

نسخه تقویتشده روتور RI60. ارتفاع کلی به میزان 2 میلیمتر افزایش یافته است تا حسگر هال بهتر عمل کند.
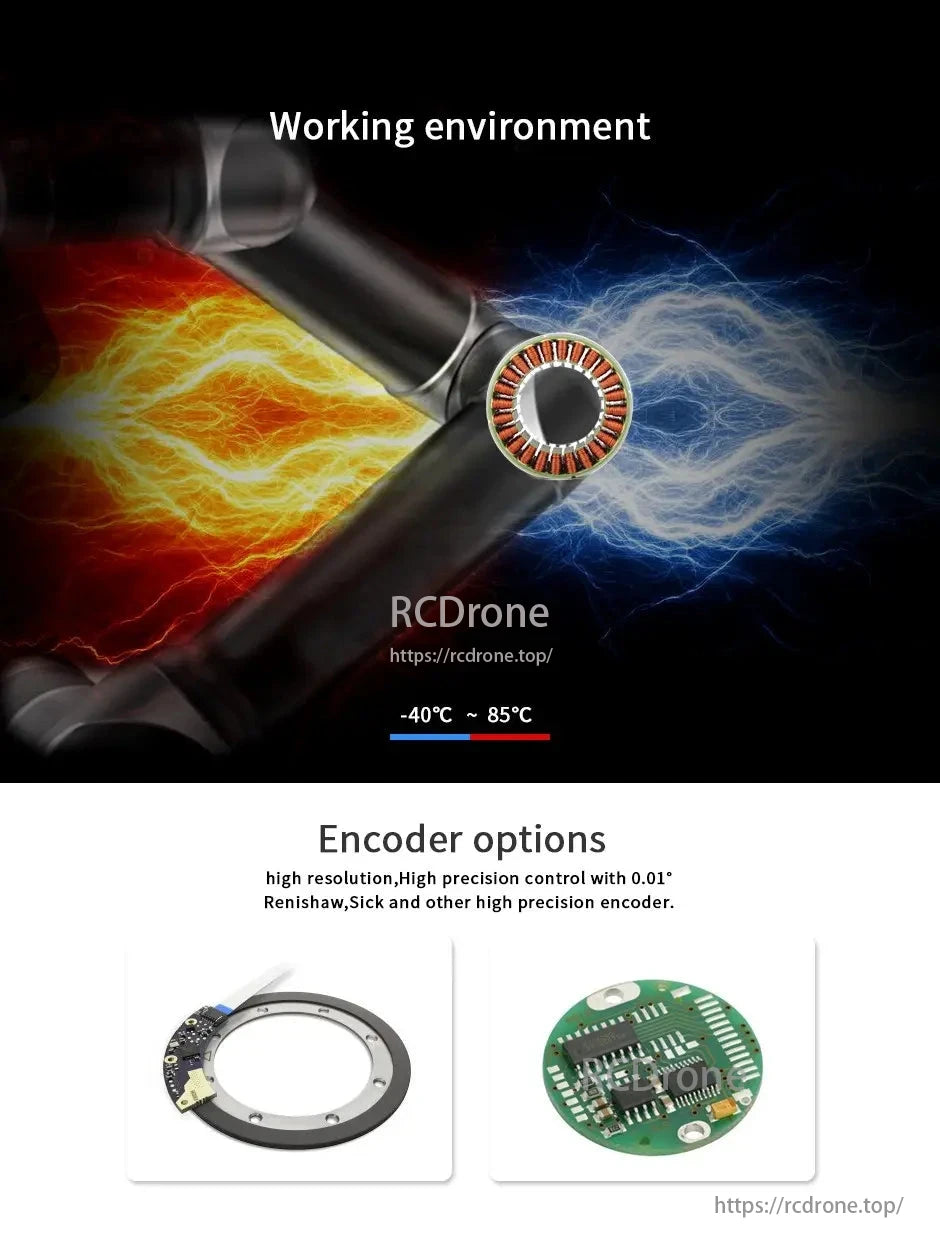
موتور CubeMars RI60: از -40°C تا 85°C، گزینههای انکودر با وضوح بالا.
Related Collections




