



موتور ربات DAMIAO DM-2325 با ولتاژ ۲۴ ولت، ۳۸۰ دور در دقیقه، ۵ نیوتنمتر، گیربکس ۱:۲۵، پشتیبانی از CAN/FD CAN و انکودر افزایشی
موتور ربات DAMIAO DM-2325 با ولتاژ ۲۴ ولت، ۳۸۰ دور در دقیقه، ۵ نیوتنمتر، گیربکس ۱:۲۵، پشتیبانی از CAN/FD CAN و انکودر افزایشی
DAMIAO
قیمت عادی
$45.00 USD
قیمت عادی
قیمت فروش
$45.00 USD
قیمت واحد
مطابق
Taxes included.
حمل و نقل هنگام تسویه حساب محاسبه می شود.
در دسترس بودن پیکاپ بارگیری نشد
بررسی کلی
موتور رباتیک DAMIAO DM-2325 یک موتور جمع و جور است که برای کنترل دقیق حرکت در رباتیک طراحی شده است. این موتور دارای بازخورد انکودر افزایشی، رابطهای کنترل CAN/FD CAN و پیکربندی UART میباشد. با نسبت کاهش 1:25، تأمین 24 ولت و حالتهای کنترل تعریف شده، این موتور برای کاربردهایی که نیاز به تنظیم قابل اعتماد سرعت و موقعیت دارند، مناسب است.
ویژگیهای کلیدی
- مدل: DM-2325
- ولتاژ نامی: 24 ولت
- جریان نامی: 5 آمپر / 3.2 آمپر; جریان اوج: 13 آمپر / 7.5 آمپر
- گشتاور نامی: 5 نیوتن·متر; گشتاور اوج: 2 نیوتن·متر
- سرعت نامی: 380 دور در دقیقه; حداکثر سرعت بدون بار: 560 دور در دقیقه
- نسبت کاهش: 1:25; جفت قطبها: 7
- اندوکتانس فاز: 75 میکروهنری; مقاومت فاز: 0.2915 اهم
- حداکثر بار شعاعی: 395 نیوتن
- ابعاد: قطر خارجی 28 میلیمتر; ارتفاع 77.6 میلیمتر
- وزن موتور: 172. html
- وزن: 2 g
- نوع انکودر: انکودر افزایشی
- رابط کنترل: CAN@1 Mbps (حداکثر)، FD CAN@5 Mbps (حداکثر)
- رابط پیکربندی: UART@921600 bps
- حالتهای کنترل: حالت MIT، حالت سرعت، حالت موقعیت
مشخصات
| مدل | DM-2325 | |
| ولتاژ اسمی | 24 V | |
| جریان اسمی | 5 A / 3.2 A | |
| جریان اوج | 13 A / 7.5 A | |
| گشتاور اسمی | 5 N·m | |
| گشتاور اوج | 2 N·m | |
| سرعت اسمی | 380 rpm | |
| حداکثر سرعت بدون بار | 560 rpm | |
| نسبت کاهش | 1:25 | |
| جفت قطبها | 7 | |
| اندوکتانس فاز | 75 μH | |
| مقاومت فاز | 0. | html۲۹۱۵ Ω |
| حداکثر بار شعاعی | ۳۹۵ N | |
| قطر خارجی | ۲۸ mm | |
| ارتفاع | ۷۷.۶ mm | |
| وزن موتور | ۱۷۲.۲ g | |
| نوع انکودر | انکودر افزایشی | |
| رابط کنترل | CAN@۱ Mbps (حداکثر)، FD CAN@۵ Mbps (حداکثر) | |
| رابط پیکربندی | UART@۹۲۱۶۰۰ bps | |
| حالتهای کنترل | حالت MIT؛ حالت سرعت؛ حالت موقعیت |
حفاظت
- حفاظت در برابر دمای بیش از حد درایو؛ دمای حفاظت: ۱۲۰ °C. دمای بیش از حد از "حالت فعال" خارج میشود.
- حفاظت در برابر دمای بیش از حد موتور؛ بر اساس نیازهای استفاده تنظیم میشود (توصیه میشود از ۱۰۰ °C فراتر نرود). دمای بیش از حد از "حالت فعال" خارج میشود.
- حفاظت در برابر ولتاژ بیش از حد موتور؛ بر اساس نیازهای استفاده تنظیم میشود (توصیه میشود از ۶۰ V فراتر نرود). ولتاژ بیش از حد از "حالت فعال" خارج میشود. html
- حفاظت در برابر از دست دادن ارتباط؛ اگر در مدت زمان تعیین شده هیچ فرمان CAN دریافت نشود، سیستم از "حالت فعال" خارج میشود.
- حفاظت در برابر جریان بیش از حد موتور؛ بر اساس نیازهای استفاده تنظیم شود (توصیه میشود از 13 آمپر بیشتر نشود). جریان بیش از حد از "حالت فعال" خارج میشود.
- حفاظت در برابر ولتاژ پایین موتور؛ اگر ولتاژ تأمین کمتر از مقدار تعیین شده باشد، از "حالت فعال" خارج میشود (ولتاژ منبع تغذیه کمتر از 15 ولت نباشد).
کاربردها
- رباتهای انساننما
- بازوهای رباتیک
- اسکلتهای بیرونی
- رباتهای چهارپا
- وسایل نقلیه AGV
- رباتهای ARU
راهنماها و دانلودها
نقشه نصب
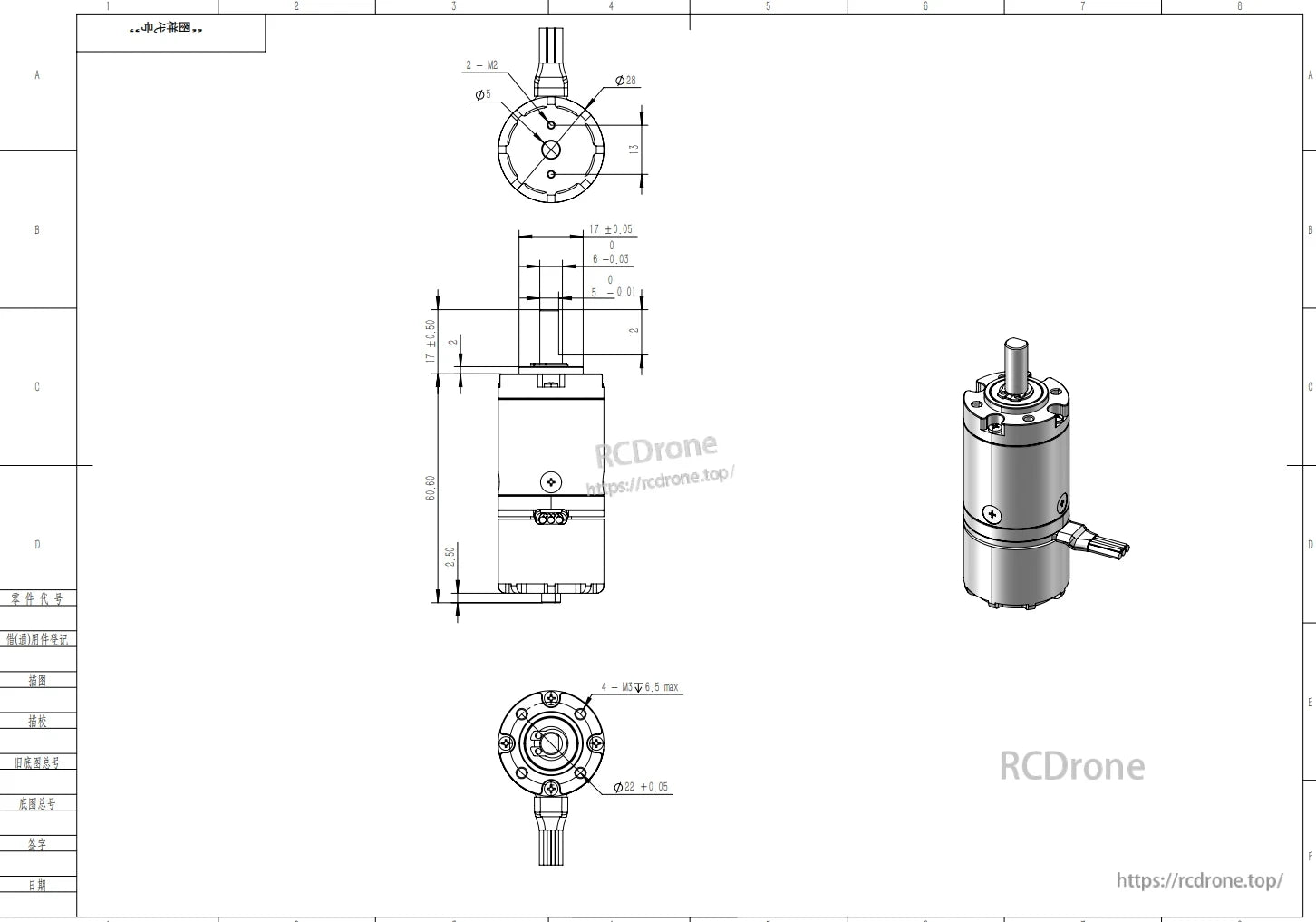
نقشه فنی موتور ربات با ابعاد و مشخصات
نقشه فنی موتور ربات با ابعاد و مشخصات

نقشه فنی موتور ربات با ابعاد و نمای 3D
Related Collections




- انتخاب یک انتخاب منجر به بازخوانی کامل صفحه می شود.
- در پنجره ای جدید باز می شود