




ماژول IMU ژیروسکوپ و شتابسنج 6 درجه آزادی DFRobot SEN0142 MPU6050 با پردازنده حرکت دیجیتال I2C مناسب آردوینو & رباتیک
ماژول IMU ژیروسکوپ و شتابسنج 6 درجه آزادی DFRobot SEN0142 MPU6050 با پردازنده حرکت دیجیتال I2C مناسب آردوینو & رباتیک
DFRobot
در دسترس بودن پیکاپ بارگیری نشد
مروری بر محصول
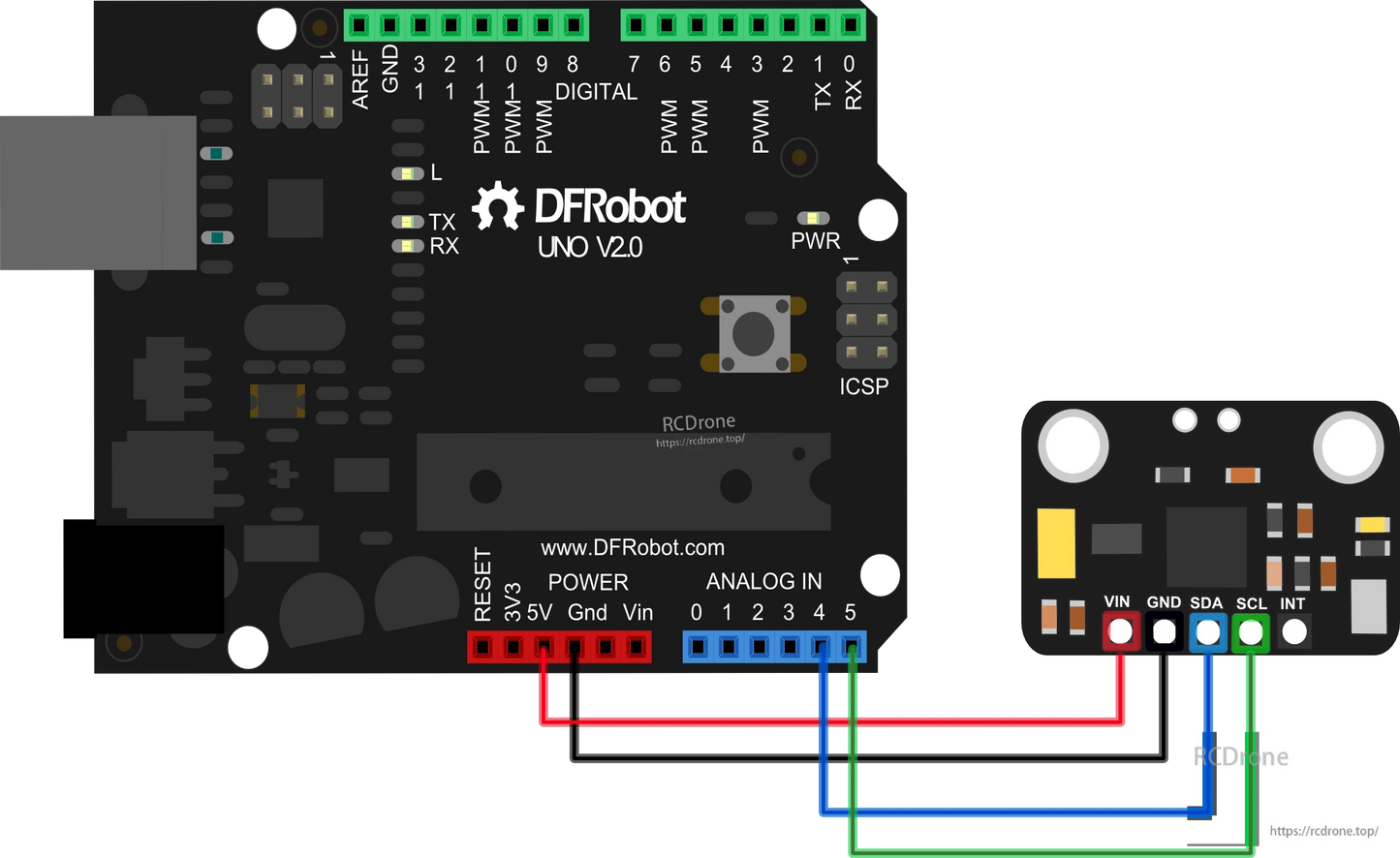
ماژول DFRobot SEN0142 MPU6050 6 DOF IMU یک ژیروسکوپ 3 محوره و شتابسنج 3 محوره را در یک تراشه واحد ادغام میکند و حسگری دقیق از حرکات را برای رباتیک، پهپادها، دستگاههای پوشیدنی و پروژههای آردوینو ارائه میدهد. این ماژول با داشتن یک پردازشگر حرکتی دیجیتال (DMP)، از الگوریتمهای پیشرفته ترکیب حرکتی 6 محوره و 9 محوره پشتیبانی میکند و خروجی دادههای کواترنیون، زاویه اویلر و دادههای خام حسگر را فراهم میآورد. با دامنه ولتاژ ورودی وسیع 3V–5V، MPU6050 میتواند بهطور مستقیم به آردوینو و سایر میکروکنترلرها متصل شود تا ردیابی حرکات در زمان واقعی و تشخیص حرکات را انجام دهد.
ویژگیهای کلیدی
-
ترکیب ژیروسکوپ 3 محوره و شتابسنج 3 محوره در یک تراشه
-
دامنه شتابسنج قابل برنامهریزی: ±2g, ±4g, ±8g, ±16g
-
حساسیت ژیروسکوپ: ±250, ±500, ±1000, ±2000 dps
-
پردازنده حرکتی دیجیتال (DMP) برای ادغام حرکتی و شناسایی حرکات
-
رابط دیجیتال I2C از فرمتهای ماتریس، کواترن، اویلر و دادههای خام پشتیبانی میکند
-
کالیبراسیون بایاس &و قطبنما برای دقت بهتر
-
سازگار با آردوینو و الکترونیکهای پوشیدنی از طریق I2Cdevlib
مشخصات
-
ولتاژ کاری: 3–5 V
خروجی: دادههای دیجیتال I2C (دادههای MotionFusion 6/9 محور)
-
شتابسنج: محدوده قابل برنامهریزی ±2g / ±4g / ±8g / ±16g
-
ژیرسکوپ: حساسیت ±250 / ±500 / ±1000 / ±2000 dps
-
فرمت داده: ماتریس چرخش، کواترنیون، زاویه اویلر، دادههای خام
-
ابعاد: 14 × 21 mm
کاربردها
-
حسگر حرکت رباتیک
-
پروژههای الکترونیکی Arduino &و DIY
-
تعامل انسان و کامپیوتر (HCI)
-
دستگاههای پوشیدنی و کنترل حرکتی
-
سیستمهای ناوبری و تعادل (e.g., وسایل نقلیه نوع سیگوی)
-
ثبات پهپاد و ردیابی حرکت
جزئیات



کد نمونه
لطفاً کتابخانهها را دانلود کنید برای تمام حسگرهای IMU ابتدا! توجه داشته باشید!




- انتخاب یک انتخاب منجر به بازخوانی کامل صفحه می شود.
- در پنجره ای جدید باز می شود