کیت توسعه پهپاد قابل برنامه ریزی Raspberry Pi F450-4B - پلتفرم های پهپاد منبع باز صنعتی Pixhawk DIY Ardupilot
کیت توسعه پهپاد قابل برنامه ریزی Raspberry Pi F450-4B - پلتفرم های پهپاد منبع باز صنعتی Pixhawk DIY Ardupilot
RCDrone
در دسترس بودن پیکاپ بارگیری نشد
نمای کلی
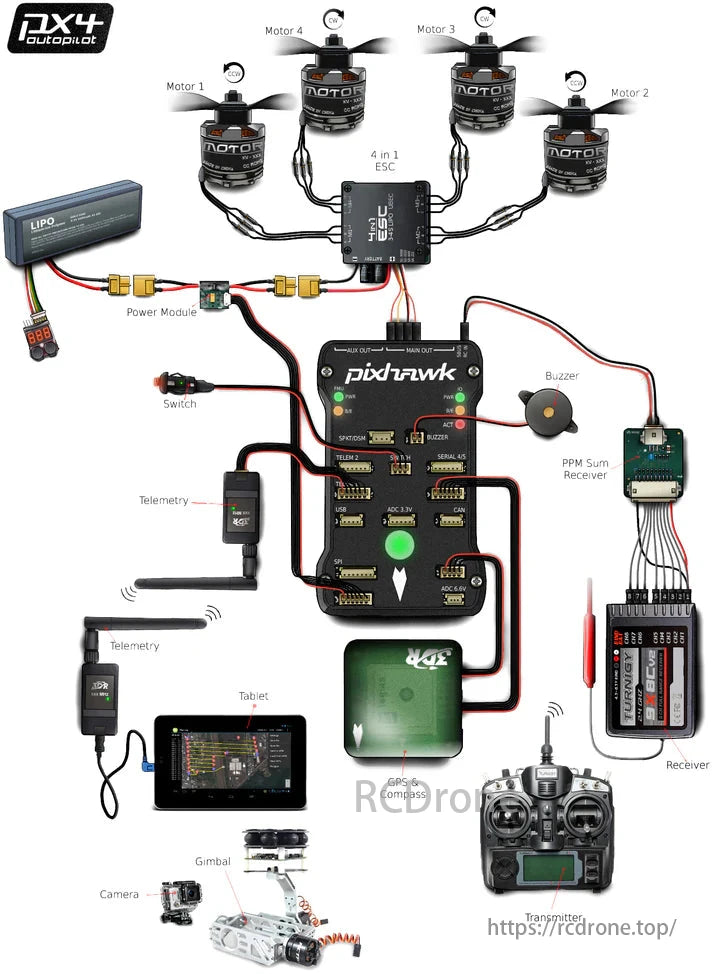
را F450-4B پهپاد رزبری پای پیشرفته است کیت پهپاد DIY که ترکیبی از یک قدرتمند است Raspberry Pi 4B کامپیوتر داخلی با همه کاره فلایت کنترل Pixhawk 2.4.8، آن را بسیار قابل تنظیم و پهپاد قابل برنامه ریزی پلت فرم این پلتفرم پهپاد منبع باز پشتیبانی از ابزارهای پیشرفته مانند Dronekit-python، توسعه دهندگان را قادر می سازد تا ماموریت های مستقل، انتقال داده ها در زمان واقعی و برنامه های پردازش تصویر مبتنی بر هوش مصنوعی را ایجاد کنند. با قاب مقاوم 450 میلی متری، دوربین 200 مگاپیکسلی HD، باتری 3S 5200 میلی آمپر ساعتی تا 20 دقیقه پرواز، و حالت های پرواز پیشرفته مانند نگه داشتن ارتفاع، بازگشت به خانه و حالت دایره ای، کیت هواپیمای بدون سرنشین F450 انتخاب ایده آلی است. علاقه مندان، محققان و مربیانی که به دنبال یک تجربه توسعه نوآورانه هواپیماهای بدون سرنشین هستند.
ویژگی های کلیدی
سخت افزار با کارایی بالا
- Raspberry Pi 4B: مجهز به یک پردازنده چهار هسته ای 64 بیتی 1.5 گیگاهرتز، پشتیبانی از خروجی ویدیوی 4K و ارتباطات پرسرعت وای فای برای عملکرد مطمئن.
- کنترلر پرواز Pixhawk 2.4.8: مجهز به چندین سنسور یکپارچه، کنترل دقیق نگرش، شناور شدن و برنامه ریزی ماموریت را تضمین می کند.
- پشتیبانی از گسترش چشم انداز: این کیت همراه با دوربین تک چشمی و ابزارهای OpenCV، نیازهای پردازش و انتقال تصویر را در زمان واقعی برآورده می کند.
حالت های پرواز متنوع
- Altitude Hold (AltHold): ارتفاع پرواز را ثابت نگه می دارد.
- شناور: شناور ثابت دقیق را ارائه می دهد.
- بازگشت به خانه (بازگشت): در هنگام از دست دادن سیگنال یا باتری کم به طور خودکار به نقطه شروع باز می گردد.
- فرود (زمین): فرود خودگردان صاف را اجرا می کند.
- حالت تثبیت: حالت پرواز را به صورت خودکار تنظیم می کند.
- حالت دایره: پروازهای دایره ای در اطراف یک هدف انجام می دهد.
- حالت بدون سر: محدودیت های جهت را برای کنترل آسان تر حذف می کند.
- خارج از کنترل بازگشت: هنگامی که سیگنال از دست رفت به یک مکان از پیش تعیین شده باز می گردد.
- فرود کم توان: در شرایط کم باتری به طور ایمن فرود می آید.
انتقال داده و پردازش تصویر
- یک شبکه وای فای محلی را از طریق یک هات اسپات داخلی بدون نیاز به روترهای خارجی ایجاد میکند و امکان انتقال بیدرنگ داده و تصویر را فراهم میکند.
- پشتیبانی از جریان و تجزیه و تحلیل ویدیو مبتنی بر OpenCV، ایده آل برای نظارت بر تصویر و برنامه های کاربردی هوشمند.
مشخصات
پارامترهای پهپاد
| پارامتر | جزئیات |
|---|---|
| نام | کیت پهپاد F450 |
| فاصله بین دو محور | 450 میلی متر |
| وزن | 1493 گرم (با باتری و Raspberry Pi 4B) |
| کنترلر پرواز | Pixhawk 2.4.8 کنترلر پرواز منبع باز |
| کامپیوتر آنبرد | Raspberry Pi 4B |
| دوربین | 200 مگاپیکسل HD 1080P |
| پشتیبانی شناور | ماژول جریان نوری و سنسور فاصله لیزری |
| ماژول GPS | GPS m8n |
| زمان پرواز | ~ 20 دقیقه (بسته به محیط و ماموریت) |
| باتری | 3S 5200mAh (11.1V) |
| ظرفیت بار | 500 گرم |
| مقاومت در برابر باد | سطح 3-4 |
| موتور | SunnySky A2212 |
| ESC | Hobbywing 20A ESC (پشتیبانی از باتری های 3S-4S LiPo) |
| پروانه ها | پروانه های خود قفل شونده T1045 |
| حداکثر ارتفاع | 2000 متر (بدون تداخل) |
| برد پرواز | 1000 متر |
| سناریوهای پرواز | داخلی / بیرونی |
مشخصات کنترلر پرواز Pixhawk 2.4.8
- پردازنده: 32 بیت ARM STM32F427 Cortex M4، 168 مگاهرتز، رم 256 کیلوبایت
- حسگرها:
- ژیروسکوپ 3 محوره 6DOF L3GD20
- شتاب سنج/ مغناطیس سنج 14 بیتی 3 محوره LSM303D
- شتاب سنج / مغناطیس سنج 6 محوری MPU6000
- فشارسنج با دقت بالا MS5611
- سازگاری کنترل زمینی: QGroundControl، MissionPlanner
- ابعاد: 81mm x 47mm x 16mm; وزن: 37 گرم
مشخصات Raspberry Pi 4B
- چیپست: Broadcom BCM2711
- CPU: چهار هسته ای 64 بیتی 1.5 گیگاهرتز
- پردازنده گرافیکی: 500 مگاهرتز VideoCore VI
- RAM: 4 گیگابایت DDR4
- رابط ها: 2 x USB 3.0، 2 x USB 2.0
- خروجی ویدیو: دو پورت micro HDMI، پشتیبانی می کند 4K@60Hz
- ارتباط: بلوتوث 5.0، وای فای 5 (2.4/5 گیگاهرتز)
- منبع تغذیه: USB Type-C (5V 3A)
بسته شامل
پیکربندی 1: موتور SunnySky A2212 با کنترل از راه دور FlySky i6 و تله متری
- قاب F450 با ارابه فرود
- موتورهای SunnySky A2212 (4 عدد)
- Hobbywing 20A ESC (4 عدد)
- پروانه های خود قفل T1045 (4 جفت)
- ماژول GPS PIX M8n
- صفحه میرایی ارتعاش
- کنترل از راه دور FlySky i6
- باتری 3S 5200mAh
- شارژر تعادل B3
- پایه GPS
- ماژول تله متری ولتاژ FS

شامل: تسمه باتری، بند کابل نایلونی، لنت چوبی، نوار چسب 3M، زنگ، ابزار نصب
ویدئوهای مونتاژ و اشکال زدایی، مطالب مرتبط ارائه شده؛ برای دریافت کد منبع با خدمات مشتری تماس بگیرید.
پیکربندی 2: موتور SunnySky A2212 با Radiolink PRO
- قاب F450 با ارابه فرود
- موتورهای SunnySky A2212 (4 عدد)
- Hobbywing 20A ESC (4 عدد)
- ملخ 9450 خود قفل (3 جفت)
- PIX.کیت ماژول GPS M8n
- صفحه میرایی ارتعاش
- Radiolink PRO (گیرنده R9DS)
- باتری کنترلی 3S 2200mAh
- باتری 3S 5200mAh
- شارژر تعادل B3
- پایه GPS

شامل: تسمه باتری، بند کابل نایلونی، لنت چوبی، نوار چسب 3M، زنگ، ابزار نصب
ویدئوهای مونتاژ و اشکال زدایی، مطالب مرتبط ارائه شده؛ برای دریافت کد منبع با خدمات مشتری تماس بگیرید.
مجموعه کیت پهپاد F450
سناریوهای کاربردی
کیت توسعه پهپاد F450-4B برای موارد زیر ایده آل است:
- تحقیق و توسعه پهپاد: تحقیقات دانشگاهی، آزمایش کنترلر پرواز، توسعه الگوریتم.
- برنامه های کاربردی هوشمند: برنامه ریزی مسیر، شناسایی هدف و اجتناب از موانع.
- تجربیات آموزشی: برنامه نویسی، مونتاژ سخت افزار و اشکال زدایی.
- استفاده میدانی: شناور در فضای داخلی، نقشه برداری در فضای باز، نظارت بر کشاورزی، و موارد دیگر.
جزئیات
پلتفرم توسعه پهپاد Raspberry Pi F450-4B
F450 یک مدل پهپاد کلاسیک و پرکاربرد است که مونتاژ ساده و راحت، عملکرد با هزینه بالا، کاربردی بودن قوی و مناسب بودن را برای مبتدیان برای شروع سریع عملیات پهپاد ارائه می دهد.

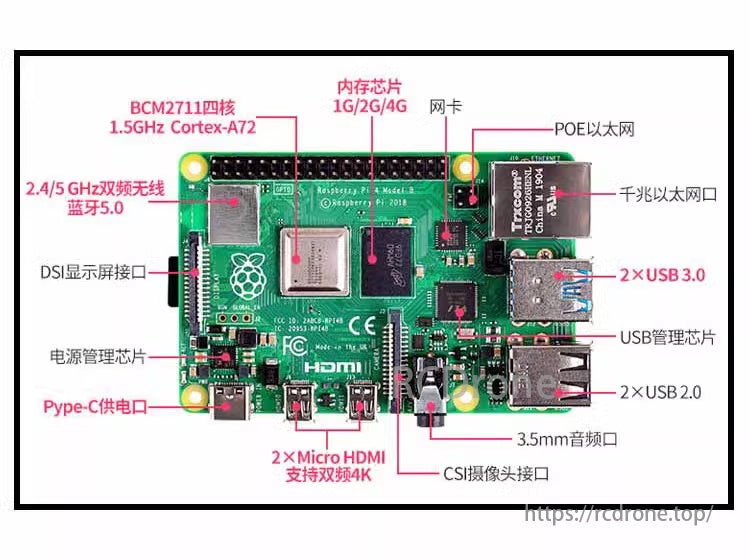
Raspberry Pi 4B ارتقا یافته است
قدرت پردازش سخت افزاری Raspberry Pi 4B به طور قابل توجهی قوی تر از 3B+ است.
Raspberry Pi به جدیدترین سیستم منبع باز مجهز شده است اوبونتو 20.04، در مقایسه با سیستم اوبونتو میت، تجربه روان تری را ارائه می دهد.

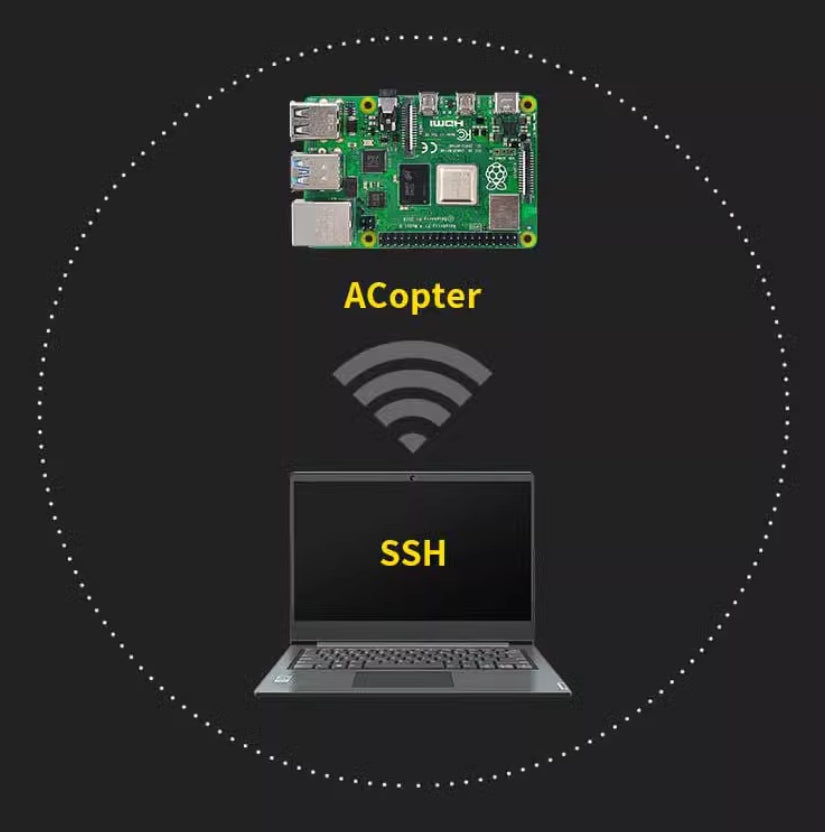
هات اسپات WiFi فعال شده سیستم (اکوپتر)
با استفاده از قابلیت وای فای Raspberry Pi 4B، یک هات اسپات خود ساخته (Acopter) ایجاد می شود. رایانه شخصی می تواند مستقیماً به هات اسپات WiFi 4B متصل شود تا یک شبکه محلی تشکیل دهد و از دستورات SSH برای دسترسی از راه دور به Raspberry Pi استفاده کند. برخلاف مدل 3B+ که برای پیکربندی شبکه به روتر نیاز دارد، این راهاندازی برای مبتدیان بسیار سادهتر و کاربرپسندتر است.
پردازش بصری OpenCV
یک دوربین تک چشمی اضافه شده است که امکان انتقال تصویر و پردازش پس از آن را فراهم می کند. جریان های ویدیویی را می توان از طریق Raspberry Pi ضبط کرد و با استفاده از ابزارهایی مانند OpenCV پردازش کرد. جریانهای ویدیوی HD بیدرنگ نیز میتوانند برای پردازش به رایانه شخصی یا برای مشاهده به دستگاه تلفن همراه ارسال شوند.

رابط توسعه بیشتر
Raspberry Pi 4B طیف گسترده ای از رابط های توسعه، از جمله دو پورت USB 3.0، دو پورت 4K micro HDMI، رابط های CSI و DSI، اترنت گیگابیتی و منبع تغذیه Type-C را ارائه می دهد که تطبیق پذیری استثنایی را برای برنامه های مختلف ارائه می دهد.
نسخه تک دوربین
نسخه تک دوربین شامل Raspberry Pi 4B و دوربین تک چشمی است که امکان برقراری ارتباط از طریق یک پورت سریال با کنترلر پرواز را فراهم می کند. از وظایفی مانند پردازش بصری، برنامه نویسی پایتون و ارتباطات پشتیبانی می کند. این نسخه برای کاربران با تجربه قبلی در استفاده از Pixhawk، دانش اولیه اوبونتو (لینوکس)، OpenCV، Raspberry Pi و ارتباطات شبکه محلی مناسب است.
علاوه بر ویژگی های اساسی، نسخه تک دوربین از انتقال تصویر و داده از طریق WiFi پشتیبانی می کند و امکان کنترل پهپاد را از طریق Dronekit-python برنامه نویسی

موقعیت یابی جریان نوری
کنترل شناور در فضای داخلی با Dronekit-python تحت شرایط موقعیتیابی جریان نوری

این پلت فرم توسعه پهپاد پشتیبانی می کند ROS، برنامه نویسی پایتون، تشخیص تصویر OpenCV، انتقال 4G از راه دور، و فرود هدایت شده بصری کد دو بعدی Aruco، آن را بسیار متنوع و نوآورانه می کند.

کنترل از راه دور FlySky i6
مجهز به گیرنده ia6b با سیستم عامل 10 کاناله، ماژول تله متری ولتاژ و برد کنترل از راه دور بیش از 1000 متر، که برای مبتدیان برای یادگیری و تمرین ایده آل است.

کنترل از راه دور Radiolink AT9S
دارای 10 کانال با برد کنترل بیش از 2000 متر. مجهز به یک ماژول تله متری که داده های مربوط به ولتاژ باتری، تعداد ماهواره GPS، ارتفاع پرواز، مختصات، حالت پرواز و غیره را ارائه می دهد.

سوالات متداول
1. آیا می توانم توسعه ثانویه را انجام دهم؟ آیا می توانم به طور مستقل برنامه ریزی کنم؟
پاسخ مثبت است. همانطور که قبلاً معرفی شد، Ardupilot در حال حاضر پرکاربردترین سیستم کنترل پرواز منبع باز است و بسیاری از مدل های پهپاد داخلی و بین المللی بسیار عالی بر اساس این سیستم توسعه یافته اند.
توسعه ثانویه عمدتاً دارای دو جهت است: توسعه کنترل پرواز و گسترش خارجی.
- توسعه کنترل پرواز
ما از Ardupilot استفاده می کنیم، بنابراین یادگیری توسعه کنترل پرواز منبع باز در درجه اول شامل مطالعه پروژه منبع باز Ardupilot است.
- مهارت های برنامه نویسی قوی مورد نیاز است (کد منبع به زبان ++C است)، همراه با دانش ریاضیات پیشرفته (ریاضیات گسسته، تکرار، خطی سازی)، فیلتر کالمن، و توسعه تعبیه شده.
- یک پایه نظری محکم مورد نیاز است. این شما را برای کار بر روی توسعه سیستم های بدون سرنشین و تحقیق و توسعه کنترل پرواز آماده می کند.
اگر می خواهید روی توسعه کنترل پرواز تمرکز کنید، بیشتر کارها باید روی رایانه شما انجام شود:
- راه اندازی محیط برنامه نویسی، دانلود سورس کد کنترل پرواز، مطالعه معماری و ماژول های کاربردی آن و ...
- پس از آشنایی با چارچوب کد، می توانید برنامه نویسی را بر اساس کد موجود آغاز کنید.
با یک مدل پایه کنترل پرواز شروع کنید و برای راهنمایی به کتاب درسی کنترل پرواز Ardupilot که ارائه می کنیم مراجعه کنید.
- توسعه توسعه خارجی
توسعه خارجی به شما امکان می دهد دستگاه های خارجی را بر اساس وظایف و سناریوهای خود از طریق رابط های رزرو شده کنترلر پرواز اضافه کنید. به عنوان مثال:
- یک ماژول جریان نوری برای موقعیت یابی و شناور شدن در فضای داخلی اضافه کنید.
- یک رادار لیزری برای جلوگیری از موانع اضافه کنید.
- از تله متری برای فعال کردن پرواز و برنامه ریزی مسیر مستقل استفاده کنید.
- یک رایانه داخلی (مثلاً Raspberry Pi) نصب کنید و از Dronekit-Python یا ROS برای برنامه ریزی برای کنترل پهپاد استفاده کنید.
هدف از افزودن رایانه داخلی انجام وظایف پیچیدهتر است، مانند:
- استفاده از دوربین Raspberry Pi برای تشخیص بصری (نیاز به OpenCV، YOLO و غیره است).
- ترکیب پروتکل های ارتباطی برای کنترل پرواز پهپاد.
- انتقال داده های پرواز یا فیلم های با کیفیت بالا از طریق شبکه.
این عملکردها را نمی توان تنها با اتکا به کنترلر پرواز به دست آورد.
مطالعه گسترش خارجی عمدتاً بر برنامه های کاربردی متمرکز است، که همچنین جهت اکثر مسابقات در سراسر کشور است.پس از یادگیری، می توانید مناطق مهم پهپادهای هوشمند مانند تشخیص بصری، ادغام هوش مصنوعی با هواپیماهای بدون سرنشین و موارد دیگر را کاوش کنید.
2. پیش نیازهای توسعه مستقل چیست؟
یادگیری در مورد هواپیماهای بدون سرنشین یک فرآیند تدریجی است. سیستمهای پهپاد بین رشتهای و یکپارچه هستند و طیف وسیعی از حوزههای دانش را در بر میگیرند. برای یادگیری ساخت پهپاد، پایه های زیر مورد نیاز است:
- مهارت های عملی اولیه، از جمله مهارت در استفاده از آهن لحیم کاری، پیچ گوشتی های مختلف و ابزارهای دیگر.
- دانش پایه الکترونیک: مفاهیمی مانند ولتاژ، جریان، توان، قطبیت و سیگنال ها.
- دانش اساسی کنترل اتوماسیون: کنترل PID، بازخورد، سیگنال های دیجیتال، سیگنال های آنالوگ و غیره.
- مهارت های اولیه کامپیوتر: درایورها، پورت های سریال، نرخ باود، نسخه های سیستم عامل، نسخه های نرم افزار.
- دانش اولیه در مورد هواپیماهای بدون سرنشین Pixhawk.
- دانش اولیه سیستم عامل اوبونتو
- مهارت زبان برنامه نویسی: مانند C++ و Python.
چگونه Respberry PI Drone بسازیم؟
Related Collections