ST-3046-C001 سروو هوشمند اتوبوس سریال 6 ولتی 40 کیلوگرمی است، مورد استفاده از آلیاژ آلومینیومی کامل، موتور بدون هسته، گیربکس فولادی، موتور بدون هسته، تخته Feetech خود کنترل شده و توسعه یافته 2 کمی سنسور کدگذاری مغناطیسی با دقت بالا گشتاور استال 40 کیلوگرم بر سانتی متر است، موقعیت بازخورد، سرعت، ولتاژ، جریان، دما، پارامترهای بار، بنابراین، حفاظت اضافه بار و جریان بیش از حد قابل تحقق است. برای کاربرد در تجهیزات صنعتی، ربات و سناریوهای کاربردی انتقال مناسب است.
SKU:STS3046
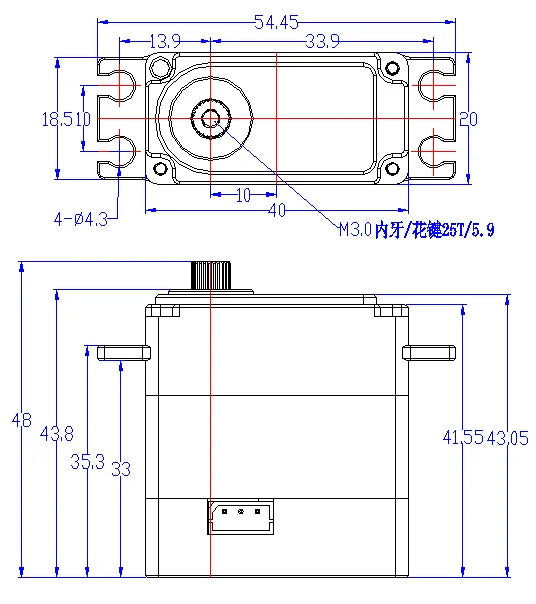
نام محصول:7.4V 40KG.CM محفظه پلاستیکی انکودر مغناطیسی چرخ دنده فلزی تک شافت سروو باس سریال TTL
اندازه ظاهری:45.2X35mm>47.2X35mmسرعت توقف:[email protected]
بازخورد: بار/موقعیت/سرعت/ولتاژ/جریان/دما
حفاظت الکترونیکی: حفاظت از گرمای بیش از حد / جریان اضافه / اضافه ولتاژ / اضافه بار




ویژگی های ساختاری:
پوسته از پوسته پلاستیکی مهندسی با استحکام بالاتر استفاده می کند، فاصله مرکز را بهینه می کند، ساختار کلی فشرده تر، دنده سروو ترکیب دنده مسی 1:345 را به کار می گیرد، گشتاور بیشتر با گشتاور یکسان. در مقایسه با اندازه سروو استاندارد، مشخصات پایینتر به نظر میرسد (5 میلیمتر)، بدنه از طراحی ساختار دو محوره استفاده میکند، ویژگیهای ساختاری دایرهای جامد، حالت سیمکشی کابلهای خروجی دوتایی با شاخهای فلزی معاون اصلی، مناسب است. کاربرد در ربات چهارپا، ربات مار، روبات رومیزی، ربات انسان نما و بازوی مکانیکی.
کنترل الکترونیکی عملکرد:
1. عملکرد توقف شروع شتاب: سرعت و مقدار شتاب را می توان تنظیم کرد، جلوه حرکت ملایم تر است.
2.دقت بالا، 360 درجه موقعیت مطلق دقت 4096 بیت، بالاترین وضوح موقعیت 0.088 درجه است، اگر کنترل 90 درجه باشد، ورودی 4096 / 360 * 90 = 1024، اگر کنترل 180 درجه باشد، ورودی 4096 / 360 * 204 = 204 برای محاسبه.
3. چهار حالت تغییر حالت کار وجود دارد (حالت 0 موقعیت سروو، حالت 1 سرعت حلقه بسته، حالت 2 سرعت حلقه باز، حالت 3 مرحله سروو).
1)、حالت 0: حالت مکان، حالت پیش فرض. در این حالت کنترل زاویه مطلق 360 درجه قابل تحقق است. از حرکت شتاب پشتیبانی کنید.
2)、حالت 1: حلقه بسته سرعت، در رابط برنامه نویسی، حالت عملیات روی 1 تنظیم شده است، به حالت حلقه بسته سرعت تغییر دهید و سرعت مربوطه را در ستون سرعت وارد کنید تا اجرا شود. .
3)、حالت 2:حلقه باز سرعت، در رابط برنامه نویسی، حالت عملیات روی 2 تنظیم شده است، به حالت حلقه باز سرعت تغییر دهید و زمان مربوطه را در ستون زمان برای اجرا وارد کنید.
4)、Mode3:Step mode: در رابط برنامه نویسی، حداکثر / حداقل محدودیت زاویه روی 0 و حالت عملیات روی 3 تنظیم شده است. به حالت مرحله تغییر دهید. موقعیت را در نوار موقعیت وارد کنید تا به سمت موقعیت هدف قدم بردارید. دوباره روی موقعیت کلیک کنید تا در همان جهت قدم بردارید.
4、حالت چرخش چندگانه، کنترل مطلق 360 درجه و بازخورد، تحت بالاترین دقت، کنترل موقعیت مطلق می تواند 7 دور به علاوه یا منفی باشد، اما تعداد چرخه های برق ذخیره نمی شود، فقط مقدار بازخورد موقعیت مطلق حفظ می شود.
5، یک کالیبراسیون کلید، نصب زاویه 360 درجه در هر موقعیت، (40 (اعشاری) آدرس ورودی 128 (اعشاری)) یک موقعیت فعلی تصحیح کلید وسط است (2048 (اعشاری)).
6 سطح ارتباط TTL، ارتباط ناهمزمان نیمه دورو، پشتیبانی از پروتکل گذرگاه برای تنظیم پارامترهای خواندن و نوشتن، و افزودن تابع خواندن همزمان (ارسال یک دستورالعمل دریافت دستورالعمل بازخوانی از هر سروو در اتوبوس به نوبه خود.)
7، حفاظت های متعدد، (اضافه بار، جریان اضافه، اضافه ولتاژ، گرمای بیش از حد، تنظیم سوئیچ، تغییر پارامتر وضعیت)
1) حفاظت اضافه بار: از طریق تشخیص موقعیت، در حین حرکت از موقعیت شروع به موقعیت هدف، زمانی که موقعیت فعلی پس از برخورد با موانع، موقعیت هدف نیست، نیروی تخلیه برای 2S (20٪) طول می کشد. نیروی مسدود کننده پیش فرض). تا زمانی که دستور جدیدی راه اندازی شود، Release protection
2)、محافظت اضافه جریان: از طریق مقدار فعلی تنظیم شده، بررسی کنید که آیا جریان به مقدار فعلی تنظیم شده می رسد یا خیر. وقتی به مقدار فعلی تنظیم شده رسید، نیرو را رها کنید (گشتاور پیش فرض 0 است). تا زمانی که دستور جدیدی راه اندازی شود، Release protection
3)、محافظت در برابر ولتاژ بیش از حد: مقدار ولتاژ فعلی را تشخیص دهید. اگر از مقدار ولتاژ تنظیم شده بیشتر شود، زنگ هشدار اضافه ولتاژ را نشان می دهد.
4)、محافظت در برابر گرمای بیش از حد: دمای فعلی موتور را تشخیص دهید. اگر دما از مقدار تنظیم شده بیشتر شود، زنگ هشدار گرمای بیش از حد را نشان می دهد.
8:بازخورد چندگانه:
1)بازخورد بار: خروجی کنترل جریان چرخه وظیفه ولتاژ موتور را هدایت می کند، و مقیاس کامل 1000 = 100% گشتاور خروجی است.
2) بازخورد فعلی: جریان کاری سروو، 1 = 6.5 میلی آمپر
3) بازخورد ولتاژ: ولتاژ کاری سروو، 70=7V,0.1V4) بازخورد دما: دمای کاری داخلی سروو فعلی (دمای اندازهگیری).

خدمات ما: ما راه حل های سفارشی یک مرحله ای را برای ساخت طراحی اصلی (ODM) و تولید تجهیزات اصلی (OEM) ارائه می دهیم. قابلیت های ما شامل طراحی الکترونیکی، طراحی سازه و تولید است.علاوه بر این، ما خدمات سفارشیسازی را برای محصولاتی مانند سرووها با ویژگیهایی مانند PWM، RS485، عملکرد 3V-24v و کنترل چرخ بازخورد 0-360 درجه ارائه میکنیم.
متخصص در ODM و OEM و سفارشی ساخته شده 1. لوگوی شما قابل چاپ یا چاپ
2. سیم سروو
3. بسته بندی: کیسه PE، جعبه رنگ، جعبه پلاستیکی wity
لوگوی شما
کانکتور 4. کابل
5. سروو ولتاژ کاری گسترده سفارشی شده
9、باز کردن پارامترهای PID.
محصولات ما گواهینامه CE و ROHS را گذرانده اند و بیشتر آنها برای ثبت اختراعات ظاهری و پتنت های مدل کاربردی درخواست داده اند
محصولات ما گواهینامه های 'CE'، 'RoHS' و 'REACH' را دریافت کرده اند. علاوه بر این، ما پتنت های ظاهری و پتنت های مدل برای طرح های خود داریم.