




دوربین عمقسنج سهبعدی Orbbec Femto Bolt – جایگزین پیشنهادی مایکروسافت برای Azure Kinect DK، با حسگر ToF یک مگاپیکسل، دوربین RGB با کیفیت 4K و IMU
دوربین عمقسنج سهبعدی Orbbec Femto Bolt – جایگزین پیشنهادی مایکروسافت برای Azure Kinect DK، با حسگر ToF یک مگاپیکسل، دوربین RGB با کیفیت 4K و IMU
Orbbec
در دسترس بودن پیکاپ بارگیری نشد
مرور
Orbbec Femto Bolt یک دوربین عمق 3D جمع و جور است که بهطور مشترک توسط Orbbec و مایکروسافت توسعه یافته است. این دوربین شامل یک سنسور عمق iToF، یک دوربین رنگی 4K و یک IMU 6DoF است و حالتهای عملیاتی و عملکرد عمق مشابهی را با Microsoft Azure Kinect و Orbbec Femto Mega ارائه میدهد. یک اتصال USB Type‑C واحد داده و برق را فراهم میکند، در حالی که همگامسازی دقیق تریگر امکان ایجاد شبکههای چند سنسوری قابل اعتماد را فراهم میآورد.
جایگزین پیشنهادی مایکروسافت برای Azure Kinect DK
ویژگیهای کلیدی
- دوربین عمق با سنسور ToF 1 مگاپیکسل؛ WFoV تا 120°
- رزولوشنهای عمق تا 1024 × 1024 @15fps، یا 640 × 576 @30fps
- 4K RGB (تا 3840 × 2160 @30fps) با HDR
- IMU 6DoF
- USB Type‑C 3.2 کابل تک برای برق و داده
- کنترل دقیق و پیشرفته همگامسازی برای شبکههای چند حسگری (همگامسازی 8 پین؛ سازگار با هاب همگامسازی Orbbec با استفاده از کابلهای RJ45/CAT)
- از فناوری ToF (زمان پرواز) معتبر صنعت مایکروسافت استفاده میکند؛ از SDK Orbbec و K4A Wrapper برای انتقال سریع از Azure Kinect DK پشتیبانی میکند و میتواند با SDK ردیابی بدن مایکروسافت استفاده شود
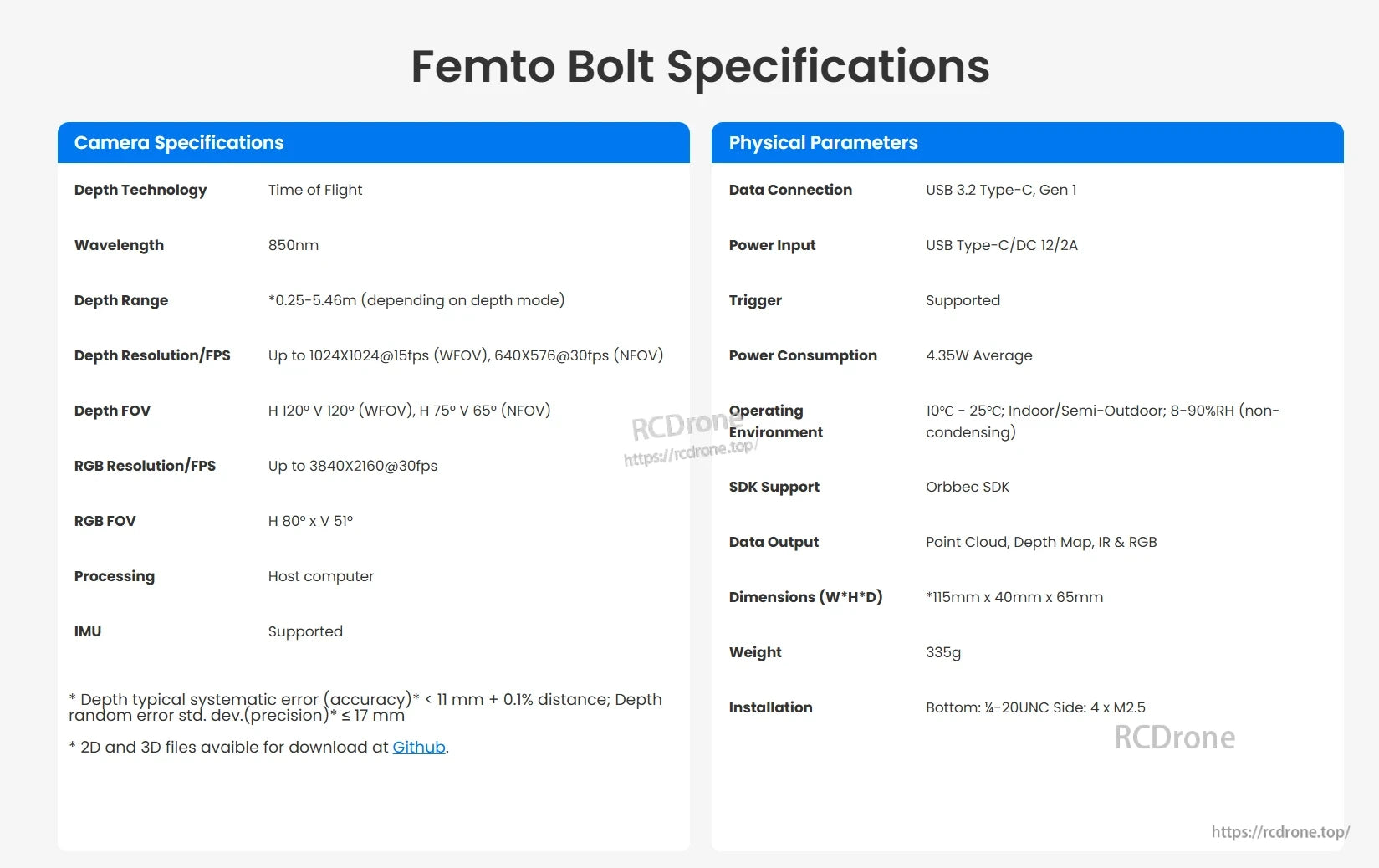
مشخصات
| محیط عملیاتی | داخلی / نیمهفضای باز |
| فناوری عمق | iToF (زمان پرواز) |
| طول موج | 850 نانومتر |
| محدوده عمق | 0.25–5.46 متر |
| دقت فضایی | < 11 میلیمتر + 0.1% فاصله؛ انحراف استاندارد خطای تصادفی عمق≤ 17 mm |
| عمق FoV | WFoV 120° × 120°; NFoV 75° × 65° |
| رزولوشن عمق / نرخ فریم | تا 1024 × 1024 @15fps (WFoV); 640 × 576 @30fps (NFoV) |
| نوع شاتر عمق | شاتر جهانی |
| رزولوشن RGB / نرخ فریم | تا 3840 × 2160 @30fps |
| FoV RGB | 80° × 51° |
| نوع شاتر RGB | شاتر رولینگ |
| IMU | پشتیبانی شده (6DoF) |
| SDK | Orbbec SDK; K4A Wrapper |
| خروجی داده | ابر نقطه، نقشه عمق، IR &و RGB |
| اتصال داده | USB 3.2 Type‑C, Gen 1 |
| منبع تغذیه | DC: 12V / 2A; USB: 5V / 3A |
| مصرف انرژی | 4.35W میانگین |
| اتصالدهنده | USB Type‑C |
| پورت همگامسازی چند دستگاهی | 8‑پین |
| دمای عملیاتی | 10℃ – 25℃ |
| رطوبت | 8–90%RH (غیر متراکم) |
| ابعاد (عرض × ارتفاع × عمق) | 115 mm × 40 mm × 65 mm |
| وزن | 335g |
| نصب | پایین: 1/4‑20 UNC; کناره: 4 × M2.5 |
| محافظت | ندارد |
| در حال پردازش | کامپیوتر میزبان |
چه چیزی شامل میشود
- دوربین 3D فمتو بولت
- آداپتور برق 12V 2A (کانکتور قابل تعویض: ایالات متحده / اتحادیه اروپا)
- کابل USB‑C به USB‑A
کاربردها
- رباتیک: شناسایی اشیاء، ردیابی و اندازهگیری دقیق برای بازوهای رباتیک.
- سلامت: بینایی کامپیوتری برای ردیابی حرکات بدن و نظارت بر وضعیت با الگوریتمهای اسکلتی.
- رسانه: عمق 1 مگاپیکسل به علاوه رنگ 4K برای ضبط حجمی در AR/XR و پخش تعاملی.
- اندازهگیری: اندازهگیری دقیق بستهها برای بهبود دقت لجستیک و حمل و نقل.
جزئیات
فمتو بولت یک دوربین عمق 3D جمع و جور و با عملکرد بالا است که دارای فناوری ToF، اتصال USB-C، RGB 4K، IMU 6DoF و همگامسازی چند حسگری میباشد.این دستگاه از Azure Kinect SDK پشتیبانی میکند و تا 15 فریم در ثانیه در وضوح عمق 1024x1024 ارائه میدهد.
Orbbec Femto Bolt از فناوری زمان پرواز با طول موج 850 نانومتر، دامنه عمق 0.25–5.46 متر، 1024×1024@15fps depth، 3840×2160@30fps RGB، USB 3.2 Gen 1 استفاده میکند، ابعاد آن 115×40×65 میلیمتر است و وزن آن 335 گرم میباشد.
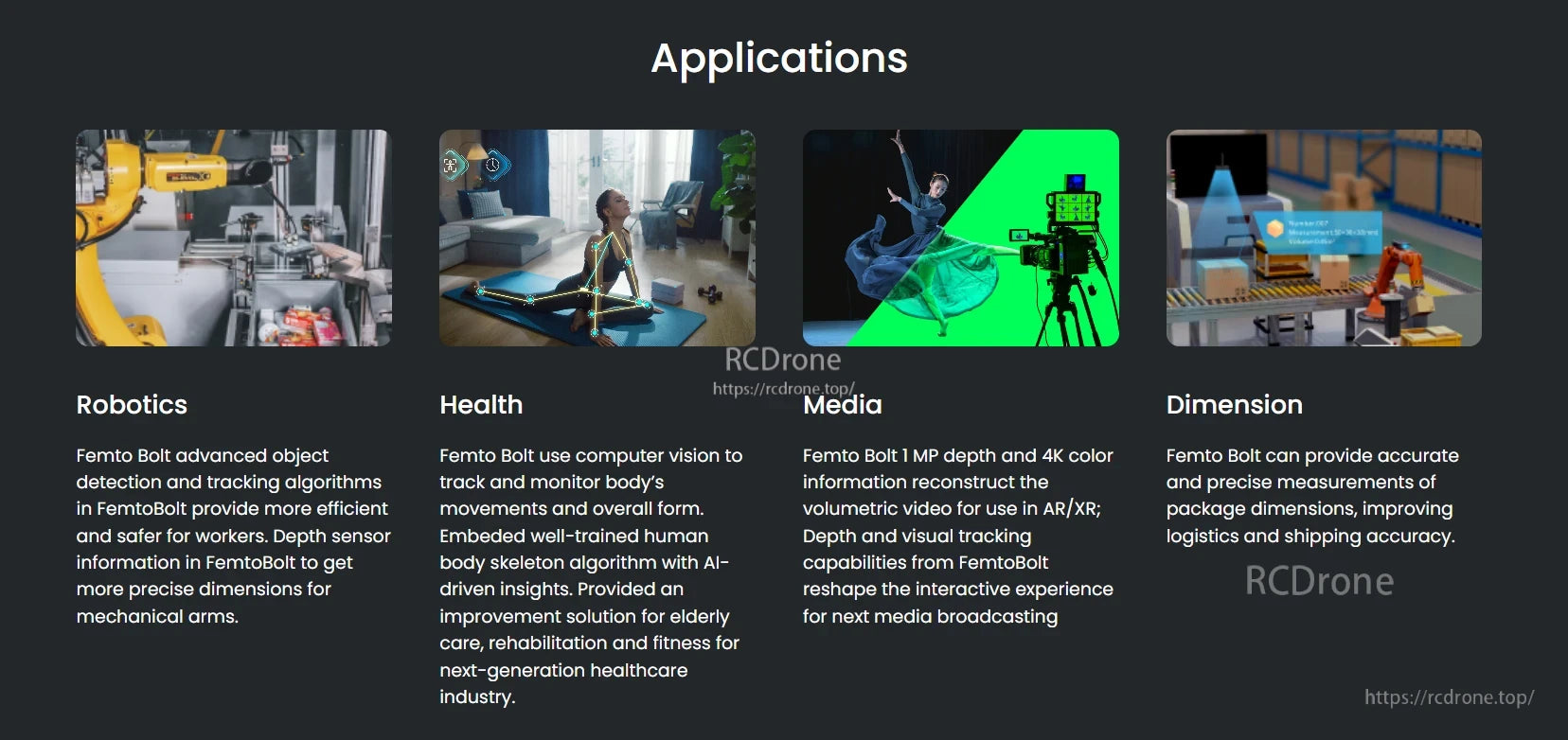
دوربین عمق 3D Femto Bolt امکان استفاده در رباتیک، بهداشت، رسانه و برنامههای ابعادی را فراهم میکند. این دستگاه ردیابی پیشرفته اشیاء، نظارت بر حرکات بدن، ویدیوهای حجمی برای AR/XR و اندازهگیری دقیق بستهها را با استفاده از حسگر عمق مبتنی بر هوش مصنوعی و بینایی کامپیوتری ارائه میدهد.

حسگر RGB-D با وضوح بالا در فرم فاکتور جمع و جور، با زاویه دید تا 1200 درجه، ایدهآل برای ضبط مناطق بزرگ است.
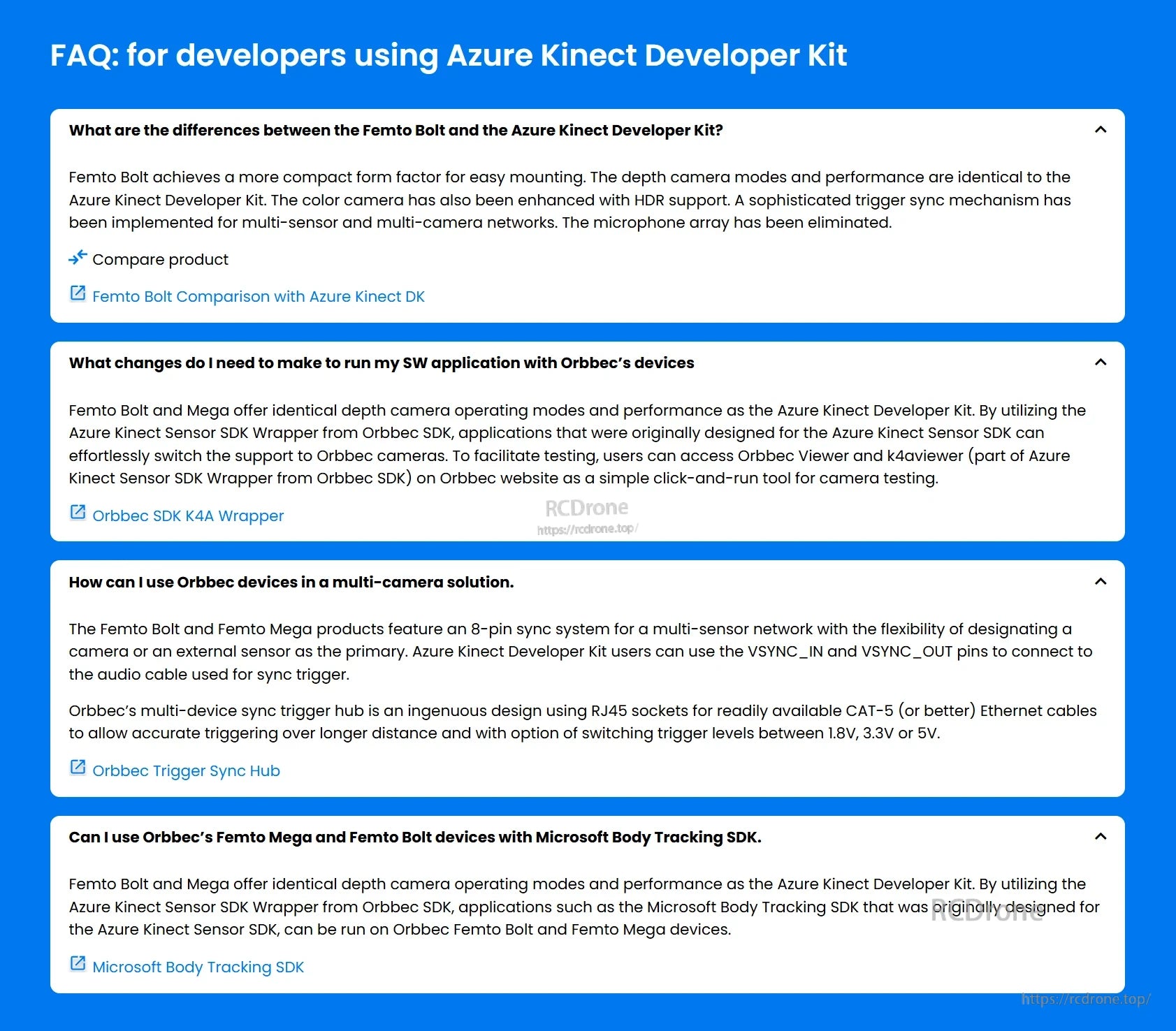
سوالات متداول برای توسعهدهندگان استفادهکننده از کیت توسعهدهنده Azure Kinect شامل تفاوتهای بین Femto Bolt و Azure Kinect، سازگاری SDK، راهحلهای همگامسازی چند دوربین و پشتیبانی از SDK ردیابی بدن مایکروسافت با Orbbec دستگاهها میباشد.
Related Collections




