


ماژول موتور گشتاور بالا HTDW-5047، قطر ۵۰ میلیمتر، ولتاژ ۱۲-۴۸ ولت، انکودر ۱۴ بیت، نسبت ۹/۲۰/۳۶
ماژول موتور گشتاور بالا HTDW-5047، قطر ۵۰ میلیمتر، ولتاژ ۱۲-۴۸ ولت، انکودر ۱۴ بیت، نسبت ۹/۲۰/۳۶
HIGH TORQUE
در دسترس بودن پیکاپ بارگیری نشد
بررسی
موتور HIGH TORQUE HTDW-5047 یک ماژول موتور جمع و جور با گشتاور بالا است که در سه نسبت کاهش (9 / 20 / 36) ارائه میشود. این موتور دارای وضوح انکودر ورودی/خروجی 14 بیتی، دامنه ولتاژ 12-48 ولت و فرکانس کنترل 3 کیلوهرتز برای کنترل حرکت و مفاصل رباتیک میباشد.
ویژگیهای کلیدی
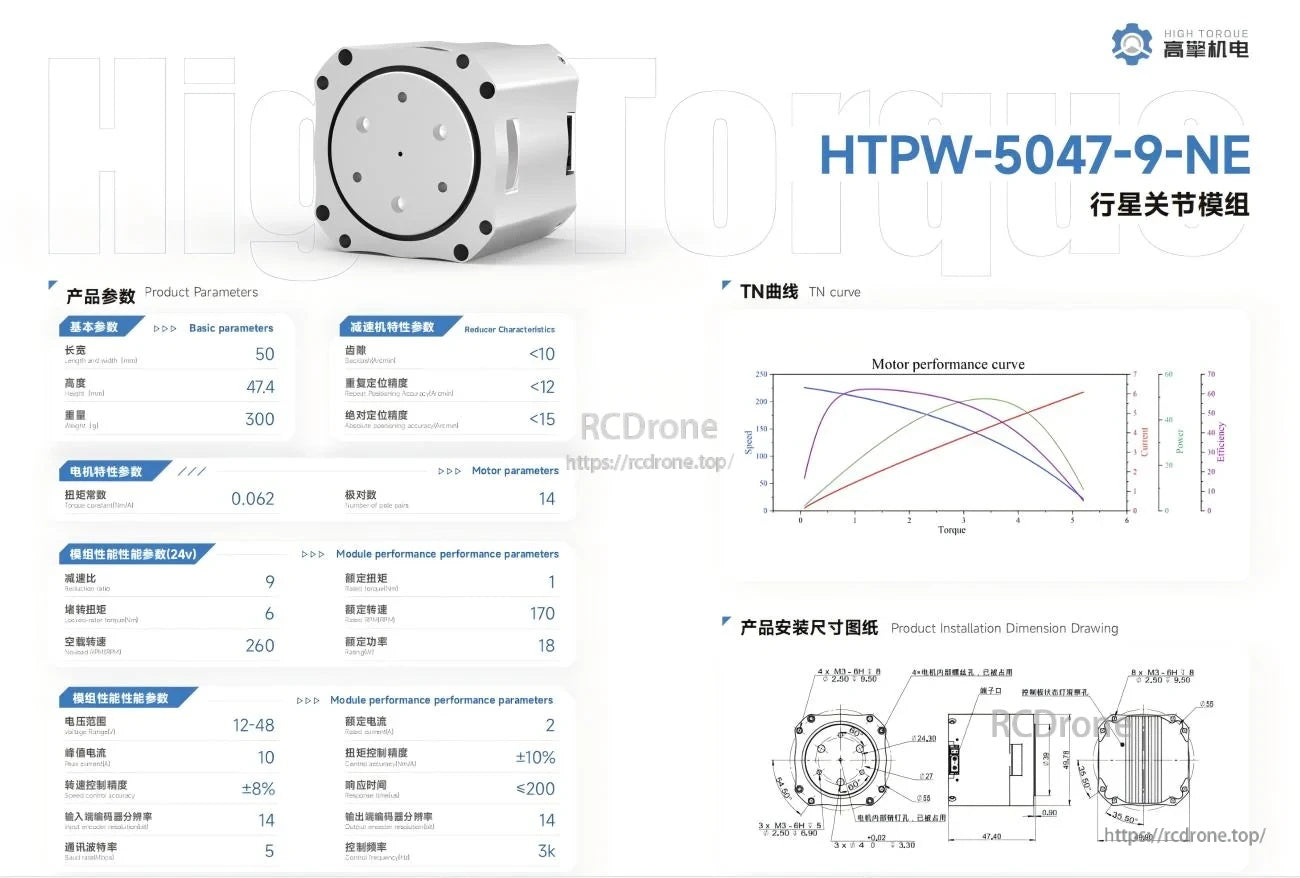
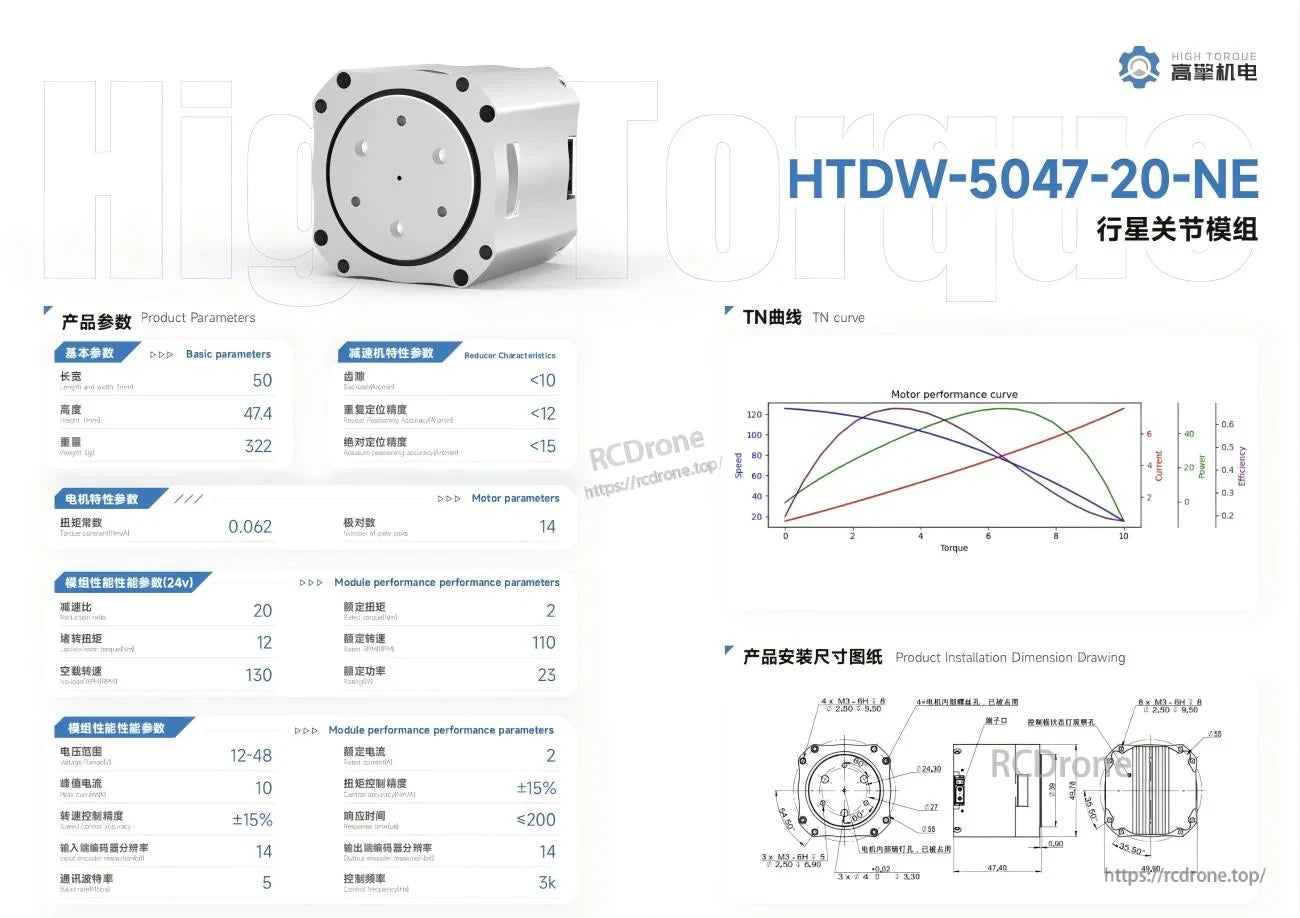
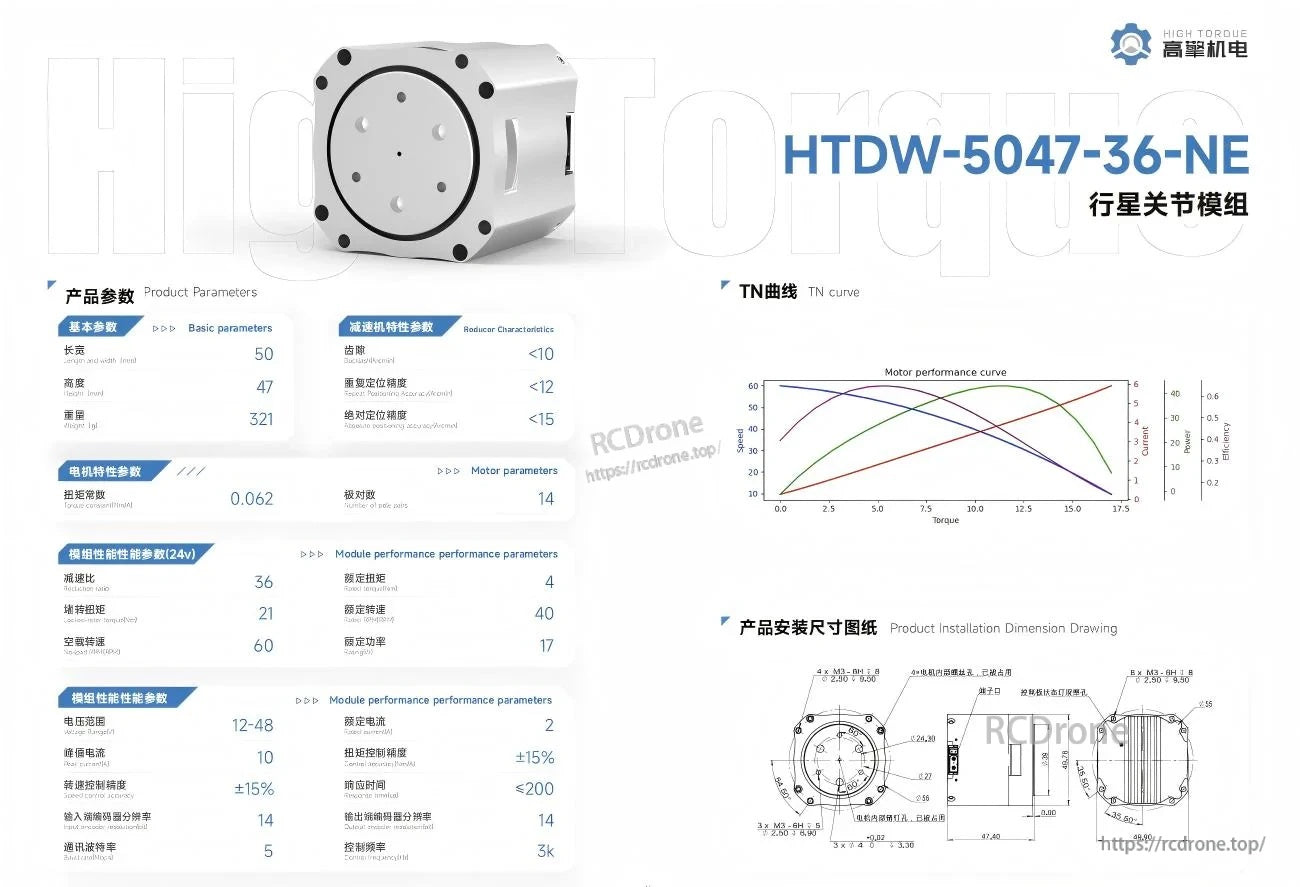
- مدلها: HTDW-5047-9-NE / HTDW-5047-20-NE / HTDW-5047-36-NE
- بکلش پایین: <10 آرکدقیقه
- دقت تکرار موقعیتیابی: <12 آرکدقیقه؛ دقت موقعیتیابی مطلق: <15 آرکدقیقه
- رزولوشن انکودر: 14 بیت (ورودی) و 14 بیت (خروجی)
- نرخ Baud: 5 Mbps؛ زمان پاسخ: ≤200 میکروثانیه
مشخصات
| پارامتر | HTDW-5047-9-NE | HTDW-5047-20-NE | HTDW-5047-36-NE |
|---|---|---|---|
| طول و عرض | 50mm | 50mm | 50mm |
| ارتفاع | 47.4mm | 47.4mm | 47mm |
| وزن | 300 گرم | 322 گرم | 321 گرم |
| بازی | <10 آرک دقیقه | <10 آرک دقیقه | <10 آرک دقیقه |
| دقت تکرار موقعیتیابی | <12 آرک دقیقه | <12 آرک دقیقه | <12 آرک دقیقه |
| دقت موقعیتیابی مطلق | <15 آرک دقیقه | <15 آرک دقیقه | <15 آرک دقیقه |
| ثابت گشتاور | 0.062 نیوتن متر بر آمپر | 0.062 نیوتن متر بر آمپر | 0.062 نیوتن متر/آمپر |
| تعداد جفت قطبها | 14 | 14 | 14 |
| نسبت کاهش | 9 | 20 | 36 |
| گشتاور قفل روتور | 6 نیوتن متر | 12 نیوتن متر | 21 نیوتن متر |
| دور در دقیقه بدون بار | 260 دور در دقیقه | 130 دور در دقیقه | 60 دور در دقیقه |
| گشتاور نامی | 1 نیوتن متر | 2 نیوتن متر | 4 نیوتن متر |
| دور در دقیقه نامی | 170 دور در دقیقه | 110 دور در دقیقه | 40 دور در دقیقه |
| رتبهبندی | 18 وات | 23 وات | 17 وات |
| دامنه ولتاژ | 12-48 ولت | 12-48 ولت | 12-48 ولت |
| جریان اوج | 10 آمپر | 10 آمپر | 10 آمپر |
| دقت کنترل سرعت | ±8% | ±15% | ±15% |
| دقت ورودی انکودر | 14 بیت | 14 بیت | 14 بیت |
| نرخ Baud | 5 مگابیت بر ثانیه | 5 مگابیت بر ثانیه | 5 مگابیت بر ثانیه |
| جریان نامی | 2 آمپر | 2 آمپر | 2 آمپر |
| دقت کنترل | ±10% | ±15% | ±15% |
| زمان پاسخ | ≤200 میکروثانیه | ≤200 میکروثانیه | ≤200 میکروثانیه |
| دقت خروجی انکودر | 14 بیت | 14 بیت | 14 بیت |
| فرکانس کنترل | 3 کیلوهرتز | 3 کیلوهرتز | 3 کیلوهرتز |
برای راهنمایی در انتخاب و پشتیبانی پس از فروش، با [email protected] or تماس بگیرید https://rcdrone.top/.
برنامهها
- رباتهای انساننما
- بازوهای رباتیک
- اسکلت خارجی
- رباتهای چهارپا
- وسایل نقلیه AGV
- رباتهای ARU
راهنماها
- راهنمای کاربر HTDW-5047-9-NE موتور با گشتاور بالا (PDF)
- راهنمای کاربر HTDW-5047-20-NE موتور با گشتاور بالا (PDF)
- راهنمای کاربر HTDW-5047-36-NE موتور با گشتاور بالا (PDF)
- راهنمای عیبیابی HTDW-5047-9-NE (PDF)
- راهنمای عیبیابی HTDW-5047-20-NE (PDF)
- راهنمای عیبیابی HTDW-5047-36-NE (PDF)
- تحلیل پروتکل 1.2 fdcan HTDW-5047-9-NE (PDF)
- تحلیل پروتکل 1.2 fdcan HTDW-5047-20-NE (PDF)
- HTDW-5047-36-NE 1.تحلیل پروتکل 2 fdcan (PDF)
- مدل سهبعدی موتور HTDW-5047-9-NE (STP, ZIP)
- مدل سهبعدی موتور HTDW-5047-20-NE (STP, ZIP)
- مدل سهبعدی موتور HTDW-5047-36-NE (STP, ZIP)
- راهنمای کاربر HTDW-5047 (PDF)
جزئیات

سری HTDW-5047 ترکیبی از فرم فاکتور جمع و جور 50 میلیمتری با گشتاور بالا برای مفاصل رباتیک و کنترل حرکت است.
نسخه کاهش 9:1 را انتخاب کنید زمانی که سرعت بالاتر در اولویت است در حالی که اندازه ماژول یکسان باقی میماند.
گزینه کاهش 20:1 تعادل بین سرعت و گشتاور را برای مفاصل و عملگرهای رباتیک عمومی فراهم میکند.
متغیر کاهش 36:1 برای مفاصل با سرعت پایین و گشتاور بالاتر که در آن موقعیتیابی دقیق حیاتی است، مناسب است.
Related Collections


